ԳՏՆՎՈՒՄ Է ՄՇԱԿՄԱՆ ՓՈՒԼՈՒՄ
ՀՀ ԿՐԹՈՒԹՅԱՆ ԵՎ ԳԻՏՈՒԹՅԱՆ ՆԱԽԱՐԱՐՈՒԹՅՈՒՆ
ՀԱՅԱՍՏԱՆԻ ՊԵՏԱԿԱՆ ՃԱՐՏԱՐԱԳԻՏԱԿԱՆ ՀԱՄԱԼՍԱՐԱՆ
Էլեկտրատեխնիկական ֆակուլտետ
էլեկտրական մեքենաների և
ապարատների ամբիոն
Վարդան Համբարյան
ԷԼԵԿՏՐԱԿԱՆ ԵՎ ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐ
Ուսումնական ձեռնարկ
ՄԱՍ I
ԵՐԵՎԱՆ
ՃԱՐՏԱՐԱԳԵՏ
2014
621.312
Ուսումնական ձեռնարկում բերված է էլեկտրական ապարատների դասակարգումը, էլեկտրամագնիսական ապա-րատների տեսական հիմունքները` էլեկտրադինամիկական ուժերի առաջացումը, մագնիսական շղթաների հաշվարկի ձևերը, էլեկտրամագնիսի կողմից զարգացնող ձգող ուժերը:
Բերված է հաստատուն մագնիսների տարատեսակները և հաստատուն մագնիսներով համակարգերի հաշվարկների մեթոդները:
Ձեռնարկը նախատեսված է էլեկտրատեխնիկական ֆակուլտետի “Էլեկտրատեխնիկա, էլեկտրամեխանիկա և էլեկտրատեխնոլոգիաներ” մասնագիտության ուսանողների համար:
Գրախոսներ` Է և ԷԲ ամբիոնի վարիչ,
տ.գ.թ., դոց. Է.Ա.Հակոբյան
ԷՄԱ ամբիոնի տ.գ.թ. դոց. Ա.Ա.Գասպարյան
Խմբագիր` Ն.Ա.Խաչատրյան
Համակարգչային ձևավորում` Ա.Ա.Թարայան
ԱՌԱՋԻՆ ԳԼՈՒԽ
1.1. էԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐ
Էլեկտրական ապարատներ կոչվում են այն էլեկտրատեխնիկական սարքերը և մեխանիզմները, որոնք նախատեսված են ավտոմատ կերպով կարգավորելու, պաշտպանելու, վերահսկելու և թողարկելու էլեկտրական շղթաները, էլեկտրական մեքենաները և այլ էլեկտրական սարքեր, ինչպես նաև հսկելու և կարգավորելու ոչ էլեկտրական պրոցեսները և օբյեկտները:
Տեխնիկայում գոյություն ունեն բազմահազար, տարբեր տիպերի էլեկտրական ապարատներ, որոնք կիրառվում են բժշկության, ատոմային ֆիզիկայի, օդագնացության և զանազան էլեկտրական և ոչ էլեկտրական սարքավորումներում: Էլեկտրական ապարատների այս դասընթացը հիմնականում ուսումնասիրում է միայն կոմուտացիոն էլեկտրական ապարատներ, ինչպես նաև պաշտպանողական, վերահսկիչ և կարգավորող ապարատներ, որոնք ծառայում են էլեկտրական էներգիան սնման աղբյուրից դեպի սպառիչները մատակարարելու, բաշխելու, կարգավորելու և փոփոխելու համար:
Սպառիչներին էլեկտրական էներգիայի անխափան և հուսալի մատակարարումը, աշխատանքային մեխանիզմների արտադրողականության բարձրացումը, դրանց անվտանգ սպասարկումը և շահագործումը, ինչպես նաև հետագա ավտոմատացումը մեծ մասամբ կախված են օգտագործվող էլեկտրական ապարատներից: էլեկտրական ապարատները ըստ նշանակության և էլեկտրական շղթաներում իրենց կատարած դերի, բաժանվում են հետևյալ խմբերի.
1. Կոմուտացիոն ապարատներ, դրանք այն ապարատներն են, որոնք նախատեսված են էլեկտրական շղթաները միացնելու, անջատելու և փոխանջատելու համար: Այս խմբին պատկանող ապարատները ըստ նշանակման բաժանվում են հետևյալ ենթախմբերիª
ա) Ապարատներ, որոնք միացնում և անջատում են միայն լարման տակ գտնվող էլեկտրական շղթաները, այդ շարքին են դասվում ցածր լարման հատիչները (рубильники), փոխարկիչները (переключатели), զատիչները և այլն:
բ) Ապարատներ, որոնք միացնում և անջատում են այնպիսի էլեկտրական շղթաներ, որոնց միջով անցնող հոսանքը ապարատի անվանական հոսանքից ավել չէ: Այդ շարքին են պատկանում կոնտրոլերները (контроллеры), փաթեթային անջատիչները (пакетные выключатели), հզորության կամ բեռնավորման անջատիչները:
գ) Էլեկտրական շղթաները բազմապատիկ միացնող և անջատող ապարատներ, որոնց միջով անցնող հոսանքները չեն գերազանցում ապարատի անվանական հոսանքներին: Այդ շարքն են դասվում հաստատուն և փոփոխական հոսանքի կոնտակտորները:
դ) Ապարատներ, որոնք էլեկտրական շղթաները անջատում են միայն գերբեռնավորման և կարճ միացման հոսանքների դեպքում: Դրանցից են` ցածր և բարձր լարման ապահովիչները:
ե) Ապարատներ, որոնք միացնում են էլեկտրական շղթաները, սրանց թվին են պատկանում բարձր լարման կարճամիացիչները (короткозамыкатели):
զ) Ապարատներ, որոնք միացնում և անջատում են էլեկտրական շղթաները դրանց աշխատանքային նորմալ և վթարային ռեժիմների դեպքում: Այս ապարատները ամենաբարդ և ամենապատասխանատու կոմուտացիոն ապարատներն են, որոնցից են ցածր և բարձր լարման անջատիչները:
2. Հոսանքի մեծությունը սահմանափակող ապարատներ, որոնք նախատեսված են էլեկտրական շղթայով անցնող հոսանքի մեծությունը փոփոխելու, կարճ միացման հոսանքի մեծությունը փոքրացնելու և էլեկտրական շղթաներում առաջացած գերլարման մեծությունը սահմանափակելու համար: Սրանց շարքը դասվում են դիմադրությունները, թողարկող ռեոստատները, կարգավորող ռեոստատները, ռեակտորները և պարպիչները:
3. Ավտոմատ վերահսկող, պաշտպանող էլեկտրական ապարատները, որոնք հսկում են էլեկտրական շղթաների, մեքենաների և սարքավորումների, ինչպես նաև ոչ էլեկտրական օբյեկտների աշխատանքի նորմալ ռեժիմի վրա և, եթե այդ ռեժիմը խախտվում է նշանակված սահմաններից, դրանք գործում են ազդելով համապատասխան կոմուտացիոն ապարատի վրա, որից հետո ավտոմատ կերպով անջատվում է շղթան կամ ստացվում է վթարային ազդանշան: Սրանց թվին են պատկանում տարբեր ֆիզիկական սկզբունքով աշխատող ռելեները և տվիչները:
4. Կարգավորող էլեկտրական ապարատներ, որոնք նախատեսված են ավտոմատ կերպով անընդհատ կարգավորելու էլեկտրական շղթաների, համակարգերի և այլ օբյեկտների նախօրոք տրված այս կամ այն պարամետրերը: Սրանց թվին պատկանում են լարման և հոսանքի ինչպես նաև հաճախականության, ջերմաստիճանի, պտտման արագության կարգավորիչները:
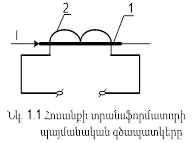
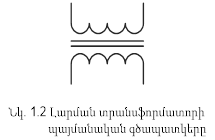
5. Չափիչ տրանսֆորմատորներ, որոնք ծառայում են մեծ հոսանքներ և բարձր լարումներ չափելու, ինչպես նաև էլեկտրաչափիչ սարքերի և այլ ավտոմատ էլեկտրամագնի-սական ապարատների հոսանքի և լարման փաթույթները սնելու համար: Սրանց թվին պատկանում են հոսանքի և լարման տրանսֆորմատորները:
Հոսանքի և լարման տրանսֆորմատորների պայմանական նշանները պատկերված են համապատասխանաբար նկ. 1.1 և 1.2–ում:
Ըստ աշխատանքի սկզբունքի, էլեկտրական ապարատները բաժանվում են`մագնիսաէլեկտրական, էլեկտրամագնիսական, ինդուկցիոն, մագնիսական, ջերմային և այլ սկզբունքներով աշխատող էլեկտրական ապարատների:
Ըստ հոսանքի լինում են` հաստատուն և փոփոխական հոսանքի:
Ըստ լարման` ցածր լարման էլեկտրական ապարատներ, որոնց նոմինալ լարումը 1000վ-ից ցածր է և բարձր լարման ապարատներ, որոնց լարումը 1000վ-ից բարձր է:
Ըստ արտաքին միջավայրից պաշտպանվելու ձևի դրանք լինում են բաց, փակ, հերմետիկ, պայթյունա անվտանգ և այլն:
Ըստ կառուցվածքի էլեկտրական ապարատները բաժանվում են 2 խմբի`
ա) կոնտակտային,
բ) անկոնտակտ:
Կոնտակտային ապարատները ազդում են կառավարման շղթաների վրա` իրենց կոնտակտները փակելու կամ բացելու միջոցով:
Անկոնտակտ էլեկտրական ապարատները չունեն կոնտակտներ: Դրանք կառավարման շղթաների վրա ազդում են իրենց պարամետրերի` դիմադրությունը, իդուկտիվությունը կամ ունակությունը փոխելու միջոցով:
Այն բոլոր էլեկտրական ապարատները, որոնք ունեն շարժական մասեր, բաժանվում են 2 խմբի`
ա) ավտոմատ,
բ) ոչ ավտոմատ:
Ավտոմատ ապարատների շարքն են դասվում այն ապարատները, որոնց աշխատանքը կախված է էլեկտրական շղթայի աշխատանքի ռեժիմից և անկախ է սպասարկող անձնակազմից:
Ոչ ավտոմատ ապարատները գործողության մեջ դրվում են միայն սպասարկող անձնակազմի օգնությամբ:
Յուրաքանչյուր էլեկտրական ապարատ բնութագրվում է որոշակի պարամետրերով, որոնցից հիմնականն ենª
1. հոսանքի տեսակըª հաստատուն կամ փոփոխական,
2. անվանական լարումը,
3. ապարատի կայունությունը,
4. կոմուտացիոն ընդունակությունը,
5. լարման վերականգնման արագությունը:
ԱՊԱՐԱՏԻ ՆՈՄԻՆԱԼ ԼԱՐՈՒՄԸ
Անվանականը, դա այն ամենամեծ լարումն է, որով երաշխավորվում է ապարատի տևական աշխատանքը: Այդ լարումը գրանցվում է ապարատի վահանկի վրա: Եթե տվյալ ապարատը աշխատում է տարբեր լարումներով, ապա որպես անվանական լարում պետք է վերցնել նշված լարումներից ամենամեծը:
Ընդունված են էլեկտրական ապարատների հետևյալ անվանական լարումներըª
ա) հաստատուն հոսանքի ցածր լարման ապարատների համար – 6Վ, 12Վ, 24Վ, 48Վ, 60Վ, 110Վ, 220Վ:
բ) միաֆազ ցածր լարման փոփոխական հոսանքի ապարատների համար – 12Վ, 24Վ, 36Վ, 127Վ, 220Վ, 380Վ:
գ) եռաֆազ ցածր լարման փոփոխական հոսանքի ապարատների համար – 36Վ, 220Վ, 380Վ, 660Վ:
դ) փոփոխական հոսանքի բարձր լարման ապարատների համար գծային լարումը կլինի - -3կՎ, 6կՎ, 10կՎ, 15կՎ, 20կՎ, 35կՎ, 110կՎ, 220կՎ, 330կՎ, 500կՎ, 750կՎ, 1150կՎ:
Այն էլեկտրական ապարատները, որոնք կիրառվում են հատուկ էլեկտրական ցանցերում, էլեկտրիֆիկացված տրանսպորտում, երկաթգծի ազդանշանային համակարգերում, նավագնացության մեջ, արդյունաբերական էլեկտրական վառարաններում և այլն, հաստատված են տարբեր լարումներª
գնացք – 50Վ; ինքնաթիռ - 26Վ; ավտոմեքենա – 6Վ, 12Վ:
Էլեկտրաքարշային ապարատների համարª
ա) հաստատուն հոսանքի համար – 250Վ, 550Վ, 750Վ, 1500Վ, 3000Վ.
բ ) փոփոխական հոսանքի համար – 6000Վ, 25000Վ.
նշված ապարատների կառավարման ցանցերի լարումները լինում ենª 24Վ, 50Վ, 75Վ, 110Վ:
Ապարատի անվանական հոսանքը դա այն հոսանքն է, որը երկարատև անցնելով տվյալ ապարատի հոսանքատար մասերով` դրանց ջերմաստիճանը թույլատրելի ջերմաստիճանից ավել չի բարձրանում: Այդ հոսանքի արժեքը գրանցվում է ապարատի վահանակի վրա:
ԱՊԱՐԱՏԻ ԿԱՅՈՒՆՈՒԹՅՈՒՆԸ
Ապարատի կայունությունը ապարատի ընդունակությունն է, որ նա կարող է դիմադրել կարճ միացման հոսանքների ջերմային և մեխանիկական ազդեցություններին, երբ կարճ միացման հոսանքները անցնում են տվյալ ապարատի հոսանքատար մասերով:
Ապարատի էլեկտրադինամիկական կայունությունը բնութագրվում է կարճ միացման հոսանքի ամպլիտուդային արժեքով, որը կարող է տվյալ ապարատը անցկացնել իր միջով առանց վնասվելու և նորմալ աշխատանքը խանգարելու:
Ապարատի ջերմային կայունությունը բնութագրվում է կարճ միացման հոսանքով, որը տվյալ ապարատը կարող է անցկացնել իր միջով որոշակի ժամանակում /1...10վրկ./, առանց նրա առանձին մասերի ջերմաստիճանը թույլատրելի ջերմաստիճանից բարձրացնելու:
ԿՈՄՈՒՏԱՑԻՈՆ ԸՆԴՈՒՆԱԿՈՒԹՅՈՒՆԸ
Ապարատի կոմուտացիոն ընդունակությունը որոշվում է այն հոսանքի մեծությամբ, որը տվյալ լարման դեպքում կարող է միացնել կամ անջատել էլեկտրական շղթան:
Ցածր լարման ապարատների կոմուտացիոն ընդունակությունը բնութագրվում էª
ա) ամենամեծ անջատման ընդունակությամբ,
բ ) ամենամեծ միացման ընդունակությամբ,
գ ) կրիտիկական անջատման ընդունակությամբ:
Ապարատի ամենամեծ անջատման ընդունակությունը արտահայտվում է շղթայի այն ամենամեծ հոսանքով, որի դեպքում էլեկտրական ապարատը կարող է անջատել շղթան առանց վնասելու և եռակցելու իր կոնտակտները:
Ապարատի ամենամեծ միացման ընդունակությունն արտահայտվում է շղթայի այն ամենամեծ հոսանքով, որի դեպքում էլեկտրական ապարատն առանց որևէ խանգարման կարող է միացնել շղթան:
Ապարատի կրիտիկական անջատման ընդունակությունն արտահայտվում է շղթայի այն ամենամեծ հոսանքով, որի դեպքում էլեկտրական ապարատը ընդունակ չէ շղթան անջատելու,այն պայմանով, որ դրանից փոքր հոսանքները, ընդհուպ մինչև ամենամեծ անջատման հոսանքները, անջատում են առանց վնասելու կոնտակտները:
ԼԱՐՄԱՆ ՎԵՐԱԿԱՆԳՆՄԱՆ ԱՐԱԳՈՒԹՅՈՒՆԸ
Փոփոխական հոսանքի շղթաները անջատելիս անջատիչ ապարատների կոնտակտների միջև առաջանում է էլեկտրական աղեղ, որի մարման ժամանակ կոնտակտների միջև եղած լարումը փոխվում է աղեղի լարումից մինչև հոսանքի աղբյուրի է.շ.ու.-ի մեծությանը հասնելը: Այս պրոցեսը կոչվում է աղեղային միջավայրի լարման վերականգնման գործընթաց և տևում չափազանց կարճ, իսկ լարման փոփոխումը ըստ ժամանակի կոչվում է լարման վերականգնման արագություն, որի մեծությունը կախված է շղթայի պարամետրերից: Լարման վերականգման արագությունն անջատող էլեկտրական ապարատներում դրանց կարևոր բնութագրերից մեկն է:
1.2. ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏԻ ԱՌԱՆՁԻՆ ՄԱՍԵՐԻ ԵՎ ՀԱՆԳՈՒՅՑՆԵՐԻ ԹՈՒՅԼԱՏՐԵԼԻ ՏԱՔԱՑՄԱՆ ՋԵՐՄԱՍՏԻՃԱՆԸ
Էլեկտրական ապարատների առանձին դետալների տաքացման թույլատրելի ջերմաստիճանը կախված է այն մեկուսիչ նյութերի թույլատրելի ջերմաստիճանից, որոնց հետ շփվում են էլեկտրական ապարատի հոսանքատար մասերը:
Մեկուսիչների ծառայության ժամկետը հիմնականում կախված է նրա տաքացման ջերմաստիճանից և այդ ջերմաստիճանի երկարատև ազդեցությունից:
Օրինակ. A դասին պատկանող մեկուսիչ նյութերի ծառայության ժամկետը 970 C – ում 10 տարի է, հետագա 100– ով բարձրացնելուց հետո նրա ծառայության ժամկետը կրճատվում է 2 անգամ, 2200 C – ում նրա ծառայության ժամկետը 20–80 ժամ է: Մեկուսիչ նյութերը, որոնք կիրառվում են էլեկտրաապարատաշինության մեջ, բաժանվում են 7 դասի.
Y, A, B, E, F, H, C որոնց թույլատրելի տաքացման ջերմաստիճանը երկարատև աշխատանքային ռեժիմում, կախված մեկուսացման դասից, հետևյալն է.
Y - 900 C; A - 1050 C; E - 1200 C; B - 1300 C; F - 1550 C; H - 1800 C; C >>1800 C :
Էլեկտրական ապարատների երկարատև աշխատան-քային ռեժիմին համապատասխանող ջերմաստիճանը հետագայում կանվանենք էլեկտրական ապարատի հաստատված ջերմաստիճան և նշանակենք
![]() ,
իսկ
,
իսկ ![]() -ի և շրջակա միջավայրի ջերմաստիճանների տարբերությունը կոչվում է գերտաքացում և նշանակվում
է`
-ի և շրջակա միջավայրի ջերմաստիճանների տարբերությունը կոչվում է գերտաքացում և նշանակվում
է` ![]() :
:
![]()
ըստ ստանդարտի ընդունվում է` Θշր 350; 400 :
Բերված դասերի ջերմակայունությանը համապա-տասխանող մեկուսիչ նյութերի բնութագրերը:
A – թելավոր նյութեր (ցելյուլոզից կամ մետաքսից), ինչպես նաև միևնույն դասին պատկանող նյութեր, որոնք տոգորված չեն հեղուկ էլեկտրամեկուսիչ նյութերով:
E – վերոհիշյալ նույնանման նյութեր, որոնք տոգորված են հեղուկ էլեկտրամեկուսիչ նյութերով:
B – մի քանի սինթետիկ օրգանական թաղանթներ, ինչպես նաև A դասին պատկանող այլ նյութեր:
F - փայլար, ասբեստ, ապակյա թելեր և նույնատիպ այլ նյութեր, որոնք զուգակցվում են օրգանական տոգորվող բաղադրիչների հետ:
H - փայլարի, ասբեստի, և ապակյա թելերի հիմքով նյութեր, որոնք զուգակցվում են սինթետիկ կապակցվող և տոգորվող նյութերով:
C - փայլարի, ասբեստի, և ապակյա թելերի հիմքով նյութեր, որոնք զուգակցվում են Si – ի, օրգանական հիմքով նյութերի, սիլիցիումի օրգանական կապակցվող և տոգորվող բաղադրությունների մեջ:
C - փայլար, կերամիկական նյութեր, ապակի, կվարց, որոնք կիրառվում են առանց կապակցվող նյութերի:
Էլեկտրական ապարատների հոսանքատար մասերի և դրանց առանձին էլեմենտների գերտաքացումը տրված է աղյուսակ 1 – ում իսկ հոսանքատար մասերի թույլատրելի ջերմաստիճանները` աղյուսակ 2 - ում:
Էլեկտրական ապարատների ամենաբարձր թույլատրելի ջերմաստիճանները
Աղյուսակ 1
|
Ապարատի մասերի անվանումը |
Երկարատև աշխատանքի ամենաբարձր թույլա-տրելի գերտաքացումը |
||
|
օդում |
Տրանսֆորմա տորային յուղում |
||
|
1 |
2 |
3 |
4 |
|
1. |
Գլխավոր շղթաները անջատող կոնտակտներ, որոնք պատրաստված են պղնձից |
55û C |
40û C |
|
2. |
Նույնը արծաթից և մետաղակերամիկական նյութերից պատրաստված կոնտակտներ |
55û C |
50û C |
|
3. |
Սահող կոնտակտներ, որոնք պատված են արծաթով |
80û C |
90û C |
|
4. |
Արծաթե բլոկ-կոնտակտներ |
80û C |
50û C |
|
5. |
Անշարժ կոնտակտային միացումներ ալյումինից, պղնձից և դրանց համաձուլ- վածքներից, որոնց մակերեսները ծածկված չեն պաշտպանիչ նյութերով |
55û C |
50û C |
|
1 |
2 |
3 |
4 |
|
6. |
Նույնը, բայց նրանց մակերեսները ծածկված են պաշտպանիչ նյութերով / ոչ ազնիվ մետաղներ / |
65û C |
50û C |
|
7. |
Նույնը, որոնց մակերեսները պատված են արծաթով |
95û C |
50û C |
|
8. |
Կոնտակտային միացումներ, որոնք միմյանց զոդված են |
60û C |
50û C |
|
9. |
Պղնձյա ճկուն միացումներ, որոնք ծածկված են կոռոզիայից պաշտպանող նյութերով |
60û C |
50û C |
|
10. |
Հոսանքատար շինաներ և մետաղյա մասեր, որոնք մեկուսացված են և մեկուսիչի հետ շփում չունեն |
75û C |
55û C |
|
11. |
Մեկուսացված հոսանքատար և ոչ հոսանքատար մասեր կամ մեկուսիչի հետ շփում ունեցող հոսանքատար և ոչ հոսանքատար մասեր` կախված մեկուսիչի դասից. Y A B |
|
|
|
45û C |
- |
||
|
60û C |
55û C |
||
|
75û C |
55û C |
||
1.3. ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ԱՇԽԱՏԱՆՔԱՅԻՆ ՌԵԺԻՄՆԵՐԸ ԵՎ ԴՐԱՆՑ ՏԵՎՈՂՈՒԹՅԱՆ ՆՈՐՄԵՐԸ
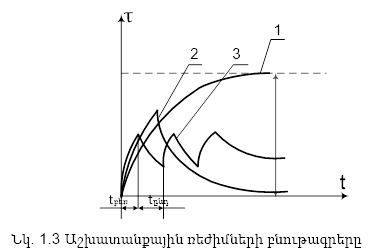
Էլեկտրական ապարատներն աշխատում են երեք աշխատանքային ռեժիմներում (նկ.1.3): Երկարատև, դա այն աշխատանքային ռեժիմն է, որի դեպքում ապարատի ջերմաստիճանը որոշ ժամանակ հետո հասնում է թույլատրելի հաստատված ջերմաստիճանին (1), և եթե հոսանքը չի փոխվում, պահպանվում է մինչև ապարատի անջատելը: Կարճատև, որի դեպքում ապարատի ջերմաստիճանն անընդհատ աճում է, բայց չի հասնում թույլատրելի ջերմաստիճանին, իսկ անջատված ժամանակամիջոցում հասցնում է սառչել մինչև շրջապատի ջերմաստիճանը (2): Կարճատև կրկնվող, որի դեպքում ապարատի ջերմաստիճանը չի հասնում հաստատված արժեքին, իսկ դադարի ժամանակը այնքան է, որ չի հասցնում սառչել (3) :
ԵՐԿՐՈՐԴ ԳԼՈՒԽ
2.1. ԷԼԵԿՏՐԱԴԻՆԱՄԻԿԱԿԱՆ ՈՒԺԵՐԸ ԷԼԵԿՏՐԱԿԱՆ
ԱՊԱՐԱՏՆԵՐՈՒՄ
Հայտնի է, որ երբ հոսանքատար հաղորդիչը գտնվում է մագնիսական դաշտում, նրա վրա որոշակի ուժ է ազդում (նկ.2.1):
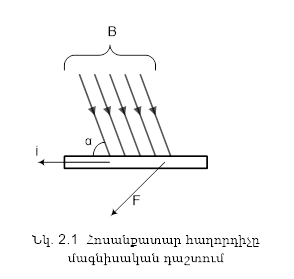
Այդ ուժի մեծությունը կլինի`
![]() ,
,
իսկ ուղղությունը որոշվում է ձախ ձեռքի կանոնով:
Մի քանի հոսանքատար կոնտուրներից կազմված համակարգում, օրինակ` կոճում, մի հոսանքատար կոնտուրը գտնվում է մյուսի ստեղծած մագնիսական դաշտում, հետևաբար այն իր վրա կրում է որոշակի ուժի ազդեցություն: Այդպիսի ուժերն կոչվում են էլեկտրադինամիկական ուժեր (ԷԴՈՒ):
Սովորական շահագործման պայմաններում այդ ուժերը բավականաչափ փոքր են և դրանք կարելի է անտեսել:
Կարճ միացման ռեժիմում այս ուժերը բավականաչափ մեծանում են և կարող են պատճառ հանդիսանալ ապարատի շարքից դուրս գալուն: Ուստի նման դեպքում դրանց հաշվի առնելը պարտադիր է դառնում:
Էլեկտրադինամիկական ուժերի հաշվարկը կարելի է կատարել երկու մեթոդով`
1) Առաջին մեթոդը հիմնված է այն սկզբունքի վրա , որ հոսանքատար հաղորդիչը մագնիսական դաշտում իր վրա կրում է որոշակի ազդեցություն:
2) Երկրորդ մեթոդը հիմնված է մագնիսական էներգիայի պաշարի փոփոխության երևույթի վրա:
Դիտարկենք առաջին մեթոդը:
Վերցնենք երկու պատահական հաղորդիչ` 1 և 2 ( նկ.2.2
) : Դրանց երկարությունները նշանակենք ![]() և
և ![]() , իսկ դրանցով անցնող հոսանքները`
, իսկ դրանցով անցնող հոսանքները` ![]() և
և ![]() :
:
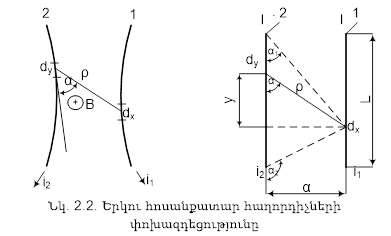
1 հաղորդիչի վրա առանձնացնենք տարրական dx տեղամաս, իսկ երկրորդի վրա` dy տեղամաս և դրանք միացնենք իրար: Տեսնենք, թե ինչպիսի H լարվածություն է ստեղծում dy տարրական տեղամասը dx – ում:
![]()
որտեղ
![]() -ն
-ն
![]() վեկտորի և dy տարրի
հոսանքի ուղղության
կազմած անկյունն
է: Ամբողջ
վեկտորի և dy տարրի
հոսանքի ուղղության
կազմած անկյունն
է: Ամբողջ ![]() հաղորդիչի
dx տարրական տեղամասում
ստեղծված մագնիսական
դաշտի լարվածությունը
կլինի`
հաղորդիչի
dx տարրական տեղամասում
ստեղծված մագնիսական
դաշտի լարվածությունը
կլինի`
![]()
Նրան համապատասխանող ուժը կլինի`
![]()
որտեղ
![]() -ն
-ն
![]() մագնիսական
ինդուկցիայի վեկտորի
և
մագնիսական
ինդուկցիայի վեկտորի
և ![]() հոսանքի
վեկտորի կազմած
անկյունն է,
հոսանքի
վեկտորի կազմած
անկյունն է, ![]() -ն`
օդի մագնիսական
թափանցելիությունը:
-ն`
օդի մագնիսական
թափանցելիությունը:
1-ին
և 2-րդ հաղորդիչների
փոխազդեցության
F լրիվ ուժը կստանանք
![]() ինտեգրումից
ինտեգրումից
![]() հաղոդիչի
ամբողջ երկարությամբ:
հաղոդիչի
ամբողջ երկարությամբ:
![]()
![]()
Արտահայտությունից երևում է, որ F ուժը բաղկացած է երկու արտադրիչների արտադրյալից: Առաջին արտադրիչը կախված է միայն հոսանքներից, իսկ երկրորդը` հաղորդիչների փոխադարձ դիրքից: Երկրորդ արտադրիչը հաճախ անվանում են կոնտուրի գործակից` C :
![]() :
:
Հաշվի
առնելով, որ ![]() ,
,
Կստանանք
![]() (
2.1)
(
2.1)
Այժմ դիտարկենք երկրորդ մեթոդը:
Հայտնի է, որ ԷԴՈՒ -ն `
![]() ,
,
որտեղ W-ն մագնիսական էներգիայի պաշարն է:
Օրինակ, եթե ունենք մեկ հոսանքատար կոնտուր, ապա`
![]()
ընդ
որում ![]() -ը
այն ուղղությունն
է, որով տեղի է ունեցել
կոնտուրների դեֆորմացիան:
-ը
այն ուղղությունն
է, որով տեղի է ունեցել
կոնտուրների դեֆորմացիան:
Եթե ունենք երկու հոսանքատար կոնտուր, որոնք փոխկապակցված են, ապա
![]()
որտեղ
![]() -ը
փոխինդուկտիվությունն
է ( Հն ), իսկ
-ը
փոխինդուկտիվությունն
է ( Հն ), իսկ ![]() -ը
և
-ը
և ![]() -ը` կոնտուրների
ինդուկտիվությունները:
-ը` կոնտուրների
ինդուկտիվությունները:
Շատ կարևոր է ճիշտ որոշել ԷԴՈՒ-ի ուղղությունը հաղորդիչների տարբեր դասավորության դեպքում:
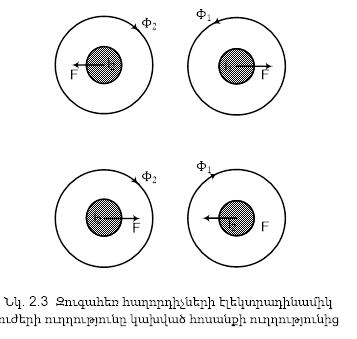
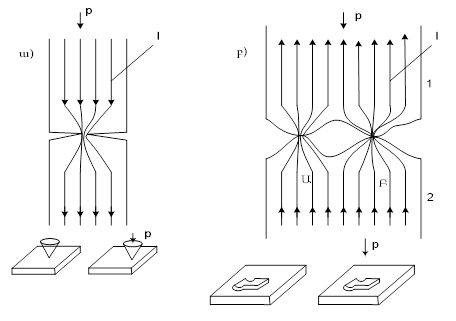
Ձախ ձեռքի օրենքի համաձայն, եթե զուգահեռ հաղորդիչների միջով անցնում են միևնույն ուղղության հոսանքներ, դրանք իրար ձգում են , իսկ հակառակ դեպքում` վանում ( նկ.2.3 ):
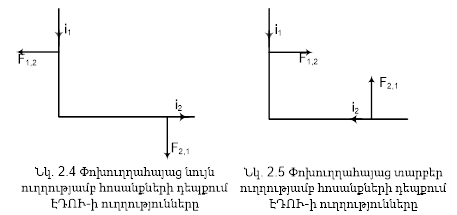
Միևնույն հարթության վրա գտնվող ոչ զուգահեռ ուղիղ հաղորդիչների ( մասնավորապես` փոխուղղահայաց ) համար կարելի է կիրառել հետևյալ օրենքը. դիտարկվող հաղորդիչների առանցքները պետք է շարունակել մինչև իրար հետ հատվելը: Եթե հոսանքը մի հաղորդիչից մյուսին անցնում է առանցքների կազմած անկյան գագաթով, ապա էլեկտրա-դինամիկական ուժերը ձգտում են լայնացնել անկյունը (նկ.2.4): Իսկ եթե հոսանքներն անկյան կողմերում ուղղված են իրար դեմ կամ հակառակ, ապա էլեկտրադինամիկական ուժերը ձգտում են փոքրացնել անկյունը (նկ.2.5):
2.2. ԷԼԵԿՏՐԱԴԻՆԱՄԻԿԱԿԱՆ ՈՒԺԵՐԸ ՓՈՓՈԽԱԿԱՆ
ՀՈՍԱՆՔԻ ԴԵՊՔՈՒՄ
Ուսումնասիրենք էլեկտրադինամիկական ուժերը զուգահեռ հաղորդիչներում` փոփոխական հոսանքի դեպքում:
Համաձայն (2.1)-ի, էլեկտրադինամիկական ուժը որոշվում է
![]()
բանաձևով:
Փոփոխական հոսանքի դեպքում
![]()
Նշանակում է` ուժը հավասար է.
![]()
այսինքն` ուժը փոփոխվում է հոսանքի հաճախությունից երկու անգամ մեծ հաճախությամբ (նկ.2.6)
|
|
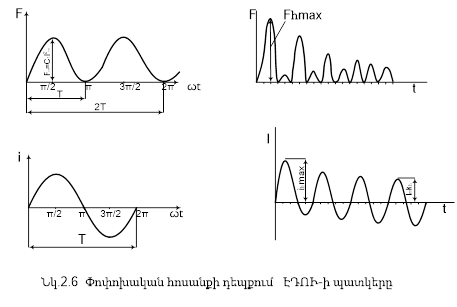
F ուժը բաղկացած
է երկու բաղադրիչների
գումարից. հաստատուն
![]() և
փոփոխական
և
փոփոխական ![]() :
Քանի որ անկյան
կոսինուսը կարող
է ստանալ 0-ից մինչև
-1 արժեքները, ապա
F ուժը կփոփոխվի
:
Քանի որ անկյան
կոսինուսը կարող
է ստանալ 0-ից մինչև
-1 արժեքները, ապա
F ուժը կփոփոխվի
![]() -ից մինչև
0` առանց նշանը փոխելու:
-ից մինչև
0` առանց նշանը փոխելու:
Հաշվարկներում վերցվում է ուժի առավելագույն արժեքը:
![]() ( 2.2)
( 2.2)
Ինչպես երևում է (2.2) բանաձևից, փոփոխական հոսանքի դեպքում էլեկտրադինամիկական ուժի առավելագույն արժեքը երկու անգամ մեծ է հաստատուն հոսանքի միևնույն (փոփոխական հոսանքի գործող արժեքին հավասար) արժեքի դեպքում որոշված էլեկտրադինամիկական ուժից:
Փոփոխական հոսանքի կարճ միացման դեպքում հարվածային հոսանքի առաջին լայնույթը զգալիորեն գերազանցում է հաստատուն հոսանքի կարճ միացման հաստատված արժեքին
.
![]()
Նշանակում է`
![]()
Ինչպես երևում է ստացված բանաձևից, էլեկտրադինամիկական ուժի հարվածային առավելագույն արժեքը փոփոխական հոսանքի կարճ միացման դեպքում կարող է համարյա 6.5 անգամ ավելի մեծ լինել, քան հաստատուն հոսանքի կարճ միացման դեպքում:
ԵՐՐՈՐԴ ԳԼՈՒԽ
3.1. ԷԼԵԿՏՐԱԿԱՆ ԿՈՆՏԱԿՏՆԵՐԸ ԵՎ ԴՐԱՆՑ ՀԻՄՆԱԿԱՆ ՀԱՏԿՈՒԹՅՈՒՆՆԵՐԸ
Էլեկտրատեխնիկական սարքավորման բոլոր տարրերը այս կամ այն ձևով կապված են իրար: Այդ տարրերի միացումը էլեկտրական շղթային, որով ապահովվում է էլեկտրական հոսանքի անցումը մի օղակից մյուսը, կոչվում է էլեկտրական կոնտակտ:
Կոնտակտային միացումը երկու կամ ավելի հաղորդալարերի միացման տեղն է:
Էլեկտրամագնիսական կոնտակտային ապարատնե-րում կոնտակտները համարվում են ամենապատասխանատու հանգույցները: Կոնտակտների սխալ հաշվարկը, կառուցվածքի ու նյութի ոչ ճիշտ ընտրությունը կարող են դառնալ դրանց քայքայման պատճառ և առաջացնել վթարներ: Ապարատների կոնտակտները իրենց աշխատանքի ընթացքում պարբերաբար միացվում և անջատվում են`կոմուտացնելով մեծ կամ փոքր հոսանքներ: Ըստ այդմ, կարելի է ասել, որ կոնտակտները գտնվում են աշխատանքային ծանր պայմաններում: Օրինակ, անջատման ժամանակ առաջանում է էլեկտրական աղեղ, որը կարող է քայքայել կամ եռակցել ապարատի կոնտակտները: Կոնտակտային մակերևույթները բաց վիճակում օքսիդանում են, պարբերաբար միացման ու անջատման հետևանքով կոնտակտային ճնշող ուժը թուլանում է, որը բացասաբար է ազդում կոնտակտների հետագա աշխատանքի վրա: Շարժական կոնտակտային միացությունների վրա բացասական ազդեցություն են թողնում կոնտակտների տատանումները (թռթռոցները):
Էլեկտրական կոնտակտներին ներկայացվում են հետևյալ պահանջները.
1. Հուսալի կոնտակտային միացում:
2. Միացման պահին կոնտակտային տատանումների բացակայություն:
3. Տաքացում թույլատրելի սահմաններում:
4. Մեծ հոսանքների դեպքում ջերմային և էլեկտրադինամիկական կայունություն:
5. Արտաքին ազդեցությունների նկատմամբ կայունություն:
6. Մեխանիկական ամրություն:
7. Երկարակեցություն:
8. Փոքր անցողիկ դիմադրություն:
9. Դիմացկունություն որոշակի թվով անջատումների և մացումների:
10. Անջատված վիճակում պետք է պահեն որոշակի լարում` առանց իրենց միջև եղած բացակը ծակելու:
Ըստ աշխատանքի բնույթի կոնտակտները լինում են.
ա) փակվող կամ նորմալ բաց (ն.բ.), սրանք այն կոնտակտներն են, որոնք գտնվում են բաց վիճակում, երբ էլեկտրամագնիսի փաթույթով հոսանք չի անցնում, իսկ անցնելու դեպքում փակվում են.
բ) բացվող կամ նորմալ փակ (ն.փ.) սրանք այն կոնտակտներն են, որոնք գտնվում են փակ վիճակում, երբ էլեկտրամագնիսի փաթույթով հոսանք չի անցնում, իսկ անցնելու դեպքում բացվում են.
գ) փոխանջատող, որոշ կառուցվածքի ռելեներում, հատկապես փոքր հզորության, փակվող և բացվող կոնտակտները տեղակայում են մի ընդհանուր կոնտակտային համակարգում, և ռելեի աշխատանքի ընթացքում նորմալ բաց կոնտակտները փակվում են, իսկ փակերը`բացվում :
Ըստ հոսանքի մեծության, կոնտակտները բաժանվում են երեք խմբի`
ա) փոքր հոսանքի (մի քանի մԱ-ից մինչև 1Ա),
բ) միջին հոսանքի (մի քանի Ա-ից մինչև 100Ա),
գ) մեծ հոսանքի (100Ա-ից մինչև մի քանի հազար Ա):
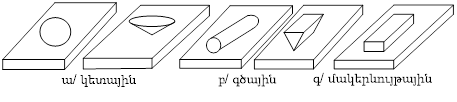
Ըստ կառուցվածքի կոնտակտները բաժանվում են երեք խմբի (նկ 3.1 )
|
Նկ.3.1 Ըստ կառուցվածքի կոնտակտների տեսակները |
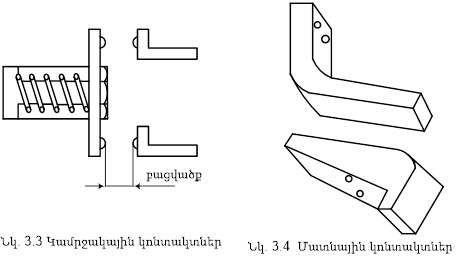
Փոքր հզորության`ավտոմատիկայի, էլեկտրակապի, պաշտպա-նության ռելեներում շարժական կոնտակտները ամրացնում են ֆոսֆորիտային բրոնզից, նեյզիլբերից կամ արույրից պատրաստված կոնտակտային զսպանակների վրա (նկ 3.2), որոնք ապահովում են նորմալ կոնտակտային ճնշում ապահովելով լավ էլեկտրահաղորդականություն և կոնտակտների միջև ստեղծում անհրաժեշտ բացակ`ապահովելով լավ էլեկտրահաղորդականություն:
Նկ.3.2 Հարթ զսպանակներով կոնտակտներ
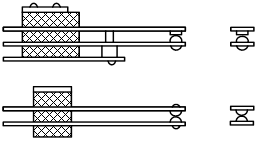
Ավելի հզոր ապարատներում կիրառում են կամրջակային կոնտակտներ (նկ 3.3), ընդ որում, անշարժ կոնտակտները տեղակայում են կոշտ մեկուսիչ սալիկի վրա, իսկ շարժականները` հաղորդիչ ձողի վրա: Կառավարման ապարատներում մեծ հոսանքների դեպքում օգտագործում են մատնային կոնտակտներ (նկ 3.4 )
3.2. ԿՈՆՏԱԿՏՆԵՐԻ ԴԱՍԱԿԱՐԳՈՒՄԸ
Իրենց նշանակությամբ էլեկտրական կոնտակտները բաժանվում են երկու խմբի.
1. Միացնող. ծառայում են միայն միացնելու տարբեր էլեկտրական հանգույցների շղթաներ, ապահովելու հոսանքի անցումը մի օղակից մյուսը:
2. Կոմուտացիոն. նախատեսված են անջատելու, միացնելու և փոխանջատելու համար:
Էլեկտրական ապարատներում օգտագործվող կոմուտացիոն կոնտակտները ըստ միացման ձևի լինում են երեք տիպի` անշարժ, շարժական և սահող:
Անշարժ կոչվում են այն կոնտակտները, որոնք աշխատանքի ընթացքում իրարից չեն բաժանվում, դրանց միացումը կատարվում է հեղույսների, սեղմակների (սառը միացում) կամ էլ եռակցման (տաք միացում) միջոցով:
Շարժական կոչվում են այն կոնտակտները, որոնք աշխատանքի ընթացքում պարբերաբար անջատվում և միանում են: Այս տիպի կոնտակտները գտնվում են աշխատանքային ծանր ռեժիմում:
Սահող կոչվում են այն կոնտակտները, որոնք աշխատանքի ընթացքում տեղափոխվում են մեկ կոնտակտային մակերեսից մյուսը` առանց շղթան խզելու: Նշված կոնտակտներից, ինչպես արդեն նշվել է, աշխատանքային ամենածանր պայմաններում են գտնվում շարժականները, վերջիններիս անջատման ժամանակ դրանց մակերեսների միջև առաջանում է էլեկտրական աղեղ, որը բարձր ջերմաստիճանի ազդեցությամբ կարող է քայքայել կոնտակտային մակերեսը:
Շարժական կոնտակտները բաց վիճակում ենթարկվում են օքսիդացման: Օքսիդի շերտը, որն ունի մեծ դիմադրություն, բացասաբար է ազդում կոնտակտների աշխատանքի վրա:
Շարժական կոնտակտների միացման և անջատման ժամանակ թուլանում է կոնտակտային ճնշումը, որը նույնպես խախտում է կոնտակտների նորմալ աշխատանքը: Միացման ժամանակ մեխանիկական և էլեկտրադինամիկ ուժեղ հարվածներից շարժական կոնտակտները կարող են վնասվել:
3.3. ԿՈՆՏԱԿՏՆԵՐԻ ԿԱՌՈՒՑՎԱԾՔԱՅԻՆ ՁԵՎԵՐԸ
Ըստ կառուցվածքի կոնտակտները բաժանվում են հինգ տեսակի. Ճակատային, վարդակային, մատնային, խոզանակային, հատող:
1. Ճակատային կոնտակտներն օգտագործվում են անջատիչ ապարատներում, հատկապես բարձր լարման յուղային անջատիչներում` 800-1000Ա աշխատանքային հոսանքներ կոմուտացնելու համար: Այս կոնտակտները լինում են` հոծ գլանաձև, սնամեջ և կիսագնդային (նկ 3 .5 ա,բ,գ):
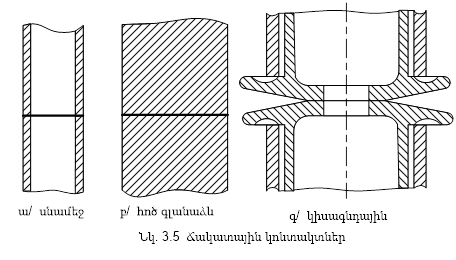
Այս կոնտակտներն ունեն մեծ անցողիկ դիմադրություն, որը փոքրացնելու համար պետք է մեծացնել կոնտակտային ճնշումը:
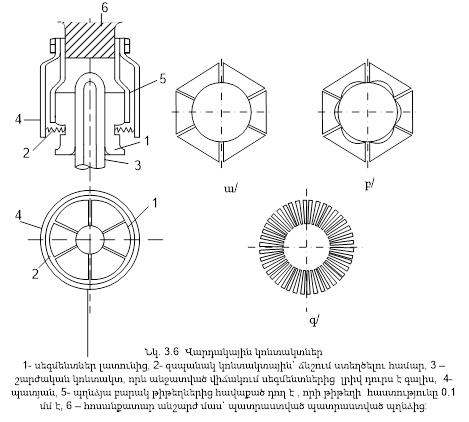
2. Վարդակային կոնտակտները մեծ կիրառություն ունեն անջատող (հատկապես բարձր լարման) ապարատներում ( նկ 3.6 ):
Վարդակային անջատիչի կոնտակտները բաղկացած են անցողիկ սեգմենտներից (1), որոնք միասին վերցրած կազմում են վարդակ: Սեգմենտները զսպանակների (2) միջոցով սեղմվում են շրջանային շարժական կոնտակտներին:
Վարդակային կոնտակտի անցողիկ դիմադրությունը շատ ավելի փոքր է, քան ճակատայինինը: Օգտագործում են բարձր լարման ապարատներում, որպես աշխատանքային կոնտակտներ:
3. Մատնային կոնտակտները մեծ մասամբ օգտագործում են բարձր լարման անջատիչներում և բաշխիչներում (նկ.3.7) : Այս տիպի կոնտակտները կիրառում են աղեղ մարող խցերում` որպես աշխատանքային կոնտակտներ: Կոնտակտների անցողիկ դիմադրու-թյունը համեմատաբար փոքր է:
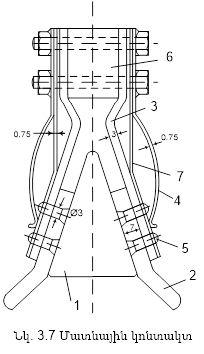
1- սեպաձև շարժական դանակ, 2- մատնային կոնտակտ (լատունից), 3 – մատնային կոնտակտը ամուր միացնող կապ, 4, 7 – պողպատյա զսպանակներ, 5 – ամրացուցիչ , 6 – հոսանքատար մաս:
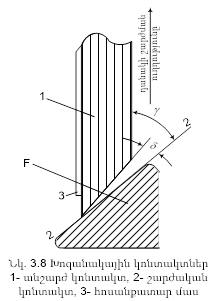
4. Խոզանակային կոնտակտները կազմված են բարակ թիթեղների հավաքածուից (նկ. 3.8): Յուրաքանչյուր թիթեղի հաստությունը 0.05-0.1 մմ. է, պատրաստում են պղնձից, պողպատից, արույրից կամ բրոնզից: Մեծ մասամբ օգտագործում են անջատող ապարատներում` որպես աշխատանքային կոնտակտներ: Նոր կոնտակտները սկզբնական վիճակում ունեն փոքր անցողիկ դիմադրություն, իսկ հետագայում, երբ աշխատանքի ընթացքում թիթեղները կորցնում են իրենց ճկունությունը, անցողիկ դիմադրությունը մեծանում է: Ուստի այդ կոնտակտները հիմնականում օգտագործվում են մեծ հոսանքների համար:
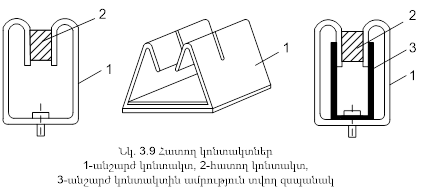
5. Հատող կոնտակտները հիմնականում օգտագործում են հատիչներում և ապահովիչներում (նկ. 3.9) :
3.4. ԿՈՆՏԱԿՏՆԵՐԻ ՀԻՄՆԱԿԱՆ ՊԱՐԱՄԵՏՐԵՐԸ
Կոնտակտների հիմնական պարամերերն են. ա) ճնշող կամ սեղմող ուժը (Pկ ) , բ) բացվածքը, գ) անկումը (իջվածքը), դ) անցողիկ դիմադրությունը (Rա) :
ա) Կոնտակտներն իրար են միացվում որոշակի ճնշող ուժով, որը հենց սեղմող ուժն է: Գոյություն ունեն երկու կոնտակ-տային ճնշումներ` սկզբնական ( Pս ) և վերջնական ( Pկ ):
Pս –ն առաջանում է կոնտակտային մակերեսների հպման պահին, իսկ Pկ – ն` կոնտակտների միացումից հետո: Անբավարար ճնշող ուժի դեպքում կոնտակտային մակերեսները իրար թույլ են հպվում, որի հետևանքով մեծանում է անցողիկ դիմադրությունը, կոնտակտները սկսում են տաքանալ, որը պատճառ է դառնում կոնտակտային մակերեսների օքսիդացմանը և քայքայմանը: Կոնտակտային սեղմող ուժը ստեղծվում է կոնտակտային զսպանակների միջոցով: Գործնականում մեծ զգայունություն ունեցող ռելեների համար կոնկակտային սեղմող ուժն ընդունում են 1– 2 գ., զգայուն ռելեների համար`5 – 20 գ., եթե հոսանքը` Iկ = 0.5 – 1Ա, իսկ 1Ա-ից մեծ հոսանքների դեպքում` 20-30 գ: Ավտոմատիկայում օգտագործվող միջանկյալ ռելեների համար Pկ –ն վերցնում են 50 – 100 գ., վոլֆրամային կամ մետաղակերամիկական կոնտակտներ ունեցող ռելեների համար`100–300գ:
բ) Կոնտակտների բացվածքը շարժական և անշարժ կոնտակտների միջև ամենակարճ հեռավորությունն է: Դրա մեծությունն ընտրում են` ելնելով կոնտակտների անջատման ժամանակ առաջացած աղեղի հուսալի մարման պայմանից:
գ) Անկումը (իջվածքը) այն հեռավորությունն է, որը կանցներ շարժական կոնտակտը, եթե հեռացված լիներ անշարժ կոնտակտը:
Կոնտակտների անկման մեծությունն ընտրում են` ելնելով դրանց մաշվածության աստիճանից: Բոլոր մնացած հավասար պայմաններում մեծ անկում ապահովում է կոնտակտների մաշակայունությունը և մեծացնում դրանց ծառայության ժամկետը: Անկման բացակայության կամ չափազանց շատ մաշվածության դեպքում կոնտակտներն իրար թույլ են միացվում, որի հետևանքով տաքանում են և շարքից դուրս են գալիս: Կոնտակտի անկման մեծությունն ընտրում են նաև` կախված տվյալ կոնտակտի շահագործման աստիճանից և կառուցվածքային ձևից: Մեծ անկման դեպքում կոնտակտի ծառայության ժամկետը մեծանում է, բայց միաժամանակ մեծանում է խարսխի ընթացքը, որը հանգեցնում է փաթույթի (IW) ամպեր-գալարների և ամբողջ մագնիսական համակարգի մեծացման:
Ելնելով այս հանգամանքից` կոնտակտների անկումը ընտրում են ըստ ռելեի ծառայության մեծ ժամկետ և նվազագույն չափսեր ստանալու պայմանով: Կոնտակտների բացվածքի և անկման մեծությունները զգալի կերպով ազդում են համակարգի մեխանիկական և էլեկտրամեխանիկական բնութագրերի վրա:
Կոնտակտների բացվածքի և անկման փոքրացումը հանգեցնում է էլեկտրամագնիսի խարսխի օդային բացակի, հետևաբար նաև համակարգի փոքրացմանը:
դ) Կոնտակտների անցողիկ դիմադրություն կամ կոնտակտային դիմադրություն:
Կոնտակտների Rա անցողիկ դիմադրությունն այն դիմադրությունն է, որն առաջանում է երկու կոնտակտների միացման կետում (նկ.3.10):
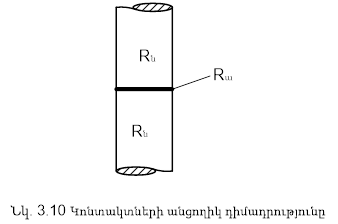
Կոնտակտային դիմադրությունը (Rկ) կազմված է երեք դիմադրությունների գումարից`
Rկ = Rն + Rա + Ro
որտեղ Rն -ը կոնտակտային նյութի դիմադրությունն է - (Օմ), Rա - ն` անցողիկ դիմադրությունը, որն առաջանում է կոնտակտների միացման կետում, Ro –ն` կոնտակտի նյութի օքսիդի շերտի դիմադրությունը:
Քանի որ Rա >> Rն –ից , Rն -ն կարելի ընդունել հավասար զրոյի, ապա
Rկ = Rա
Rա -ն կառաջանա տվյալ կոնտակտով հոսանք անցնելիս: Rն -ը հաստատուն է` կախված է միայն նյութից և տաքացման ջերմաստիճանից: Rա -ն փոփոխական է` կախված կոնտակտային ճնշումից, նյութի մակերեսի մաքրությունից և նյութի տեսակից:
Կոնտակտների միացման տեղն ունի բավականին բարդ պատկեր: Եթե կոնտակտների մակերեսը դիտարկենք մանրադիտակով, ապա կտեսնենք, որ կոնտակտային զույգն իր մակերեսի ոչ բոլոր կետերով է շփման մեջ ( նկ.3.11 ա, բ ): Բերված օրինակում կոնտակտները իրար են հպվում Ա, Բ, կետերով, և այդ կետերում հոսանքի ուժագծերի խտությունը մեծանում է, առաջանում է անցողիկ դիմադրություն, որի վրա մեծանում են լարման անկումն ու կորուստները:
Նկ. 3.11 Կոնտակտային միացության միկրոսկոպիկ պատկերը
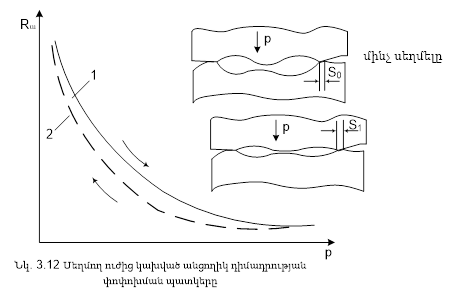
Որքան մեծ է կոնտակտային ճնշումը, այնքան մեծ է հպման կետերի թիվը, որը հանգեցնում է անցողիկ դիմադրության փոքրացմանը (նկ. 3.12): Կոնտակտների միացման մակերեսը`
![]() սմ2 ,
սմ2 ,
որտեղ
![]() -
ն ժամանակավոր
դիմադրությունն
է (պղնձի համար
-
ն ժամանակավոր
դիմադրությունն
է (պղնձի համար
![]() =
5200 կգ/սմ2, իսկ փափուկ
պղնձի համար
=
5200 կգ/սմ2, իսկ փափուկ
պղնձի համար ![]() = 3020 կգ/սմ2
):
= 3020 կգ/սմ2
):
Եթե միացման կետերից մեկը պատկերենք կոնի տեսքով (նկ.3 .11, ա), որի վրա ազդում են P ուժով, և այն համարենք կետային մակերես, ապա անցողիկ Rա.օ դիմադրությունը կորոշվի հետևյալ բանաձևով.
![]() , ( 3.1)
, ( 3.1)
որտեղ
![]() -ը
հաղորդիչ միջավայրի
տեսակարար էլեկտրական
դիմադրությունն
է (Օմ.սմ):
-ը
հաղորդիչ միջավայրի
տեսակարար էլեկտրական
դիմադրությունն
է (Օմ.սմ):
Եթե կոնտակտային միացումն ունի n թվով հպվող կետեր, ապա անցողիկ դիմադրությունը n անգամ փոքր կլինի: Հետևապես, բազմակետային կոնտակտի համար անցողիկ դիմադրությունը կարող ենք արտահայտել հետևյալ կերպ.
![]() , ( 3.2)
, ( 3.2)
որտեղ
![]() -
ն որոշվում է հպման
մակերեսի միջոցով`
-
ն որոշվում է հպման
մակերեսի միջոցով`![]() :
Բազմակետային
կոնտակտի ընդհանուր
մակերեսը`
:
Բազմակետային
կոնտակտի ընդհանուր
մակերեսը`![]() :
Այստեղից կարելի
է գրել
:
Այստեղից կարելի
է գրել ![]() -
ի արժեքը հետևյալ
ձևով.
-
ի արժեքը հետևյալ
ձևով.

![]() -ի արժեքը
տեղադրելով (3.2.) բանաձևում
կստանանք.
-ի արժեքը
տեղադրելով (3.2.) բանաձևում
կստանանք.
![]() (
3.3)
(
3.3)
Հպման
կետերի թիվը կախված
է կոնտակտների
վրա ազդող ճնշման
ուժից ![]() :
Ճնշման մեծացմանը
զուգընթաց հպման
կետերի թիվն ավելանում
է: Կոնտակտային
ճնշման ուժի անընդհատ
մեծացումը միշտ
չէ որ ուղեկցվում
է հպման կետերի
ավելացմամբ, ուստի
ընդհանուր տեսքով
կարող ենք գրել.
:
Ճնշման մեծացմանը
զուգընթաց հպման
կետերի թիվն ավելանում
է: Կոնտակտային
ճնշման ուժի անընդհատ
մեծացումը միշտ
չէ որ ուղեկցվում
է հպման կետերի
ավելացմամբ, ուստի
ընդհանուր տեսքով
կարող ենք գրել.
![]() ,
,
որտեղից
![]() :
:
Այսպիսով, բազմակետային կոնտակտի համար անցողիկ դիմադրությունը կարող ենք արտահայտել հետևյալ բանաձևով.
![]() ( 3.4)
( 3.4)
(3.1), (3.3), (3.4)
բանաձևերից երևում
է, որ անցողիկ դիմադրության
վրա ազդում են
![]() և
և
![]() մեծությունները,
կոնտակտային նյութը
և P ճնշումը: Բազմակետային
կոնտակտի վրա ազդում
են նաև S –ը,
մեծությունները,
կոնտակտային նյութը
և P ճնշումը: Բազմակետային
կոնտակտի վրա ազդում
են նաև S –ը, ![]() -ն
, հպման
կետերի թիվը, կոնտակտների
մակերեսը և վիճակը:
-ն
, հպման
կետերի թիվը, կոնտակտների
մակերեսը և վիճակը:
Եթե
(3.3) և (3.4.) բանաձևերը
ձևափոխենք, նկատի
առնելով, որ հաշվարկների
ժամանակ n -ի, S
–ի և ![]() – ի մեծութունների
որոշումը գործնականորեն
հնարավոր չէ, կարող
ենք գրել , որ
– ի մեծութունների
որոշումը գործնականորեն
հնարավոր չէ, կարող
ենք գրել , որ
![]()
որտեղ K -ն կախված է կոնտակտի նյութից, մակերեսից և մշակման ձևից (աղ.3.1),

![]() –ը,
m-ը կախված է կոնտակտի
ձևից և հպվող կետերի
թվից (աղ.3.2):
–ը,
m-ը կախված է կոնտակտի
ձևից և հպվող կետերի
թվից (աղ.3.2):
Աղյուսակ3.1 Աղյուսակ 3.2
|
Կոնտակտի նյութը k* 10 -3
|
|
Կոնտակտի ձևը
|
m
|
|
Արծաթ – արծաթ 0,06 |
|
Կետային կոնտակտների համար
Խոզանակային կոնտակտների համար
Հարթ կոնտակտների համար |
0.5
0.5 - 0.7
0.7 - 1 |
|
Պղինձ – պղինձ 0,08 – 0,141 |
|||
|
Ալյումին – ալյումին 3 – 6,7 |
|||
|
Արույր – արույր 0,67 |
|||
|
Պողպատ – արույր 3,04 |
Քանի որ կոնտակտների նյութի դիմադրությունը շատ փոքր է, ոստի հաշվի ենք առնում միայն անցողիկ դիմադրությունը, որի վրա ազդում են հետևյալ գործոնները:
1.
Նյութն
իր տեսակարար դիմադրությամբ`
![]() -ով
և
-ով
և ![]() -
ով: Որքան մեծ են
-
ով: Որքան մեծ են
![]() -ն
և
-ն
և ![]() -ն, այնքան
մեծ է անցողիկ
դիմադրությունը:
-ն, այնքան
մեծ է անցողիկ
դիմադրությունը:
2. Ճնշող ուժից կախված անցողիկ դիմադրությունը փոփոխվում է հետևյալ ձևով ( նկ.3.12)-ում ատկերված տեսքով:
3. Անցողիկ դիմադրությունը կախված է նաև կոնտակտային մակերեսի մեծությունից, բայց վերջինիս ազդեցությունը սահմանափակ է, որովհետև այդ մակերեսը բնորոշվում է m - ով (կոնտակտի ձևով): Քանի որ m = 0.5-1, ապա որքան էլ մեծանա մակերեսը, ձգտի հասնել 1-ի սահմանին, անցողիկ դիմադրությունը չի փոխվի:
4. Կոնտակտների դիմադրությունը, կախված ջերմաստիճանից, հաշվարկվում է հետևյալ բանաձևով (փորձնական).
![]() ,
(3.5)
,
(3.5)
որտեղ
![]() –
ն մեկ կետի անցողիկ
դիմադրությունն
է,
–
ն մեկ կետի անցողիկ
դիմադրությունն
է, ![]() –ն
կոնտակտային նյութի
դիմադրության
մեծացման ջերմաստի-ճանային
գործակիցն է,
–ն
կոնտակտային նյութի
դիմադրության
մեծացման ջերմաստի-ճանային
գործակիցն է, ![]() –ն` կոնտակտի
ջերմաստիճանը:
–ն` կոնտակտի
ջերմաստիճանը:
ՉՈՐՐՈՐԴ ԳԼՈՒԽ
4.1. ԷԼԵԿՏՐԱԿԱՆ ՀՈՍԱՆՔԻ ԱՂԵՂ
Գոյություն ունեցող բազմաթիվ և տարատեսակ էլեկտրական ապարատներից ամենահիմնականը էլեկտրական շղթաները անջատող ապարատներն են, որոնք նախատեսված են էլեկտրական շղթաները կոմուտացնելու համար:
Էլեկտրական շղթան կարող է անջատվել երկու ձևով` ա) կոնտակտների անջատման ժամանակ դրանց միջև աղեղ կամ կայծ չի առաջանում. Դա տեղի է ունենում, երբ էլեկտրական շղթան անջատվում է անբեռ ռեժիմում կամ չափազանց փոքր հոսանքների դեպքում, բ) կոնտակտների անջատումից հետո շղթան չի խզվում, կոնտակտների միջև եղած գազը կամ օդը իոնացվում է, ու դրանց միջև առաջանում է էլեկտրական աղեղ, որի հետևանքով հոսանքը շղթայում չի ընդհատվում:
Կոնտակտների անջատման ժամանակ աղեղի առաջացման պայմաննրն են. ա) շղթայով անցնող հոսանքը չպետք է պակաս լինի 80 – 100 մԱ –ից, բ) աղեղի լարումը չպետք է պակաս լինի 10 – 20 Վ – ից:
Էլեկտրական աղեղը լիցքավորված մասնիկների հոսք է, որոնք առաջանում են կոնտակտների բաժանման սկզբնական պահին և ստեղծում աղեղային միջավայր: Երբ կոնտակտներն իրարից բաժանվում են, և դրանց անցողիկ դիմադրությունը մեծանում է, անջատվող մակերեսը խիստ տաքանում է, որը պայմաններ է ստեղծում միջավայրի իոնացման ու աղեղի առաջացման համար: Եթե կոնտակտներն անջատվեն հոսանքի զրո արժեքի դեպքւմ (փոփոխական հոսանքի պայմաններում), ապա նրանց միջև աղեղ չի առաջանա:
ԱՂԵՂԱՅԻՆ ՄԻՋԱՎԱՅՐԻ ԻՈՆԱՑՄԱՆ ԵՎ ԻՈՆԱԶԵՐԾՄԱՆ ՊՐՈՑԵՍԸ
Լիցքավորված մասնիկների քանակի ավելացումը աղեղային միջավայրում տեղի է ունենում երեք եղանակով` հարվածային իոնացման, ջերմաէլեկտրոնային էմիսիայի և բարձր ջերմաստիճանի ազդեցությամբ գազային միջավայրում կատարվող իոնացման:
1. Հարվածային իոնացում: Սա առաջանում է այն դեպքում, երբ էլեկտրական դաշտի ուժերի ազդեցությամբ շարժվող ազատ էլեկտրոնները, որոնք ունեն պահեստսյին մեծ կինետիկ էներգիա, բախվելով այդ միջավայրում գտնվող գազի կամ օդի չեզոք ատոմների հետ, նրանցից անջատում են էլեկտրոններ (որոնք դառնում են լիցքավորված իոններ): Սրանք իրենց հերթին իոնացնում են չեզոք մոլեկուլները և այսպես` շղթայաբար: Քանի որ էլեկտրոնի ազատ վազքի տարածությունը հակադարձ համեմատական է միջավայրի ճնշմանը, ապա աղեղային միջավայրի ճնշումը բարձրացնելիս հարվածային իոնացման պրոցեսը թուլանում է: Հարվածային իոնացման մեծությունն ուղիղ համեմատական է շղթայի լարմանը;
2. Ջերմաէլեկտրոնային էմիսա: Սա ֆիզիկական այն երևույթն է, երբ շիկացած մարմինները ճառագայթում են էլեկտրոններ: Էլեկտրոն արձակող շիկացած մարմինը կաթոդն է:
3. Իոնացում բարձր ջերմաստիճանի ազդեցությամբ: Բարձր ջերմաստիճանում օդի կամ գազի մասնիկներն ավելի արագ են շարժվում, այդ պատճառով էլ ատոմները և մոլեկուլները իրար հանդիպելիս կարող են քայքայվել ու բաժանվել` ճեղքվելով հակառակ լիցքավորված մասնիկների: Մոլեկուլի քայքայման դեպքում տեղի է ունենում տարաբաժանման (դիսոցման) երևույթ. օրինակ, Օ3→Օ2+O, այսինքն` մոլեկուլից ատոմի անջատում: Ատոմի քայքայման դեպքում տեղի ունի իոնացման երևույթ`ատոմից էլեկտրոնի անջատում: Իոնացման համար ավելի բարձր ջերմաստիճան է պահանջվում քան տարաբաժման համար:
Իոնազերծում աղեղային միջավայրում: Սա իոնացման հակառակ պրոցեսն է: Այն աղեղային միջավայրում իրականանում է լիցքավորված մասնիկների չեզոքացման և դրանց դիֆուզիայի միջոցով: Լիցքավորված մասնիկների ակտիվ չեզոքացումը տեղի է ունենում այն ժամանակ, երբ դրանք հպվում են միջավայրի սառը պատերին, որոց միջև գտնվում է գազ կամ օդ: Չեզոքացումը տեղի է ունենում նաև վերամիավորման (ռեկոմբինացիայի) միջոցով, երբ դրական իոնները հանդիպում են բացասական իոններին: Վերամիավորման արագությունը հակադարձ համեմատական է աղեղի տրամագծի քառակուսուն: Տրամագիծը փոքրացնելիս իոնազերծման պրոցեսը արագանում է:
Դիֆուզիան այն երևույթն է, որի ժամանակ աղեղային միջավայրում գտնվող լիցքավորված մասնիկների մի մասը մեծ արագությամբ դուրս է թռչում այդ միջավայրից` այնտեղ պակասեցնելով լիցքավորված մասնիկների քանակը, որը և նպաստում է աղեղի մարմանը: Դիֆուզիայի արագությունը ուղիղ համեմատական է աղեղի սյան մակերեսին եղած լիցքավորված մասնիկների քանակին:
4.2. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԱՂԵՂ
Հաստատուն
հոսանքի աղեղի
հիմնական բնութագիրը
նրա վոլտ-ամպերային
(ՎԱ) բնութագիրն
է (նկ.4.1), որն արտահայտում
է աղեղի լարման
կախումը հոսանքից:
Հոսանքի մեծացմանը
զուգընթաց փոքրանում
է աղեղի լարումը`
![]() :
:
Բնութագրի
այս հատկությունը
պայմանավորված
է աղեղային միջավայրի
իոնացման, հատկապես
ջերմա-էլեկտրոնային
էմիսիայի երևույթներով,
որոնց դեպքում
աղեղի դիմադրությունը
փոքրանում է և,
հետևաբար, աղեղի
![]() հոսանքը`
մեծանում:
հոսանքը`
մեծանում:
Այն
լարումը, որի դեպքում
կոնտակտների միջև
առաջանում է աղեղ,
անվանում ենք
աղեղի բոցավառման
լարում (![]() :
Վերջինս կախված
է կոնտակտների
հեռավորու-թյունից,
միջավայրի ջերմաստիճանից,
կոնտակտների ու
միջավայրի ճնշումից,
նյութից և այլն:
Եթե աղեղի միջով
անցնող հոսանքը
փոփոխվում է շատ
դանդաղ (AB կորը նկ.
4.2), բայց ՎԱ բնութագրի
յուրաքանչյուր
կետում աղեղը կայուն
բոցավառվում է,
միաժամանակ, աղեղի
լարումը նվազում
է, այդպիսի բնութագիրն
անվանում են ստատիկ
բնութագիր:
:
Վերջինս կախված
է կոնտակտների
հեռավորու-թյունից,
միջավայրի ջերմաստիճանից,
կոնտակտների ու
միջավայրի ճնշումից,
նյութից և այլն:
Եթե աղեղի միջով
անցնող հոսանքը
փոփոխվում է շատ
դանդաղ (AB կորը նկ.
4.2), բայց ՎԱ բնութագրի
յուրաքանչյուր
կետում աղեղը կայուն
բոցավառվում է,
միաժամանակ, աղեղի
լարումը նվազում
է, այդպիսի բնութագիրն
անվանում են ստատիկ
բնութագիր:
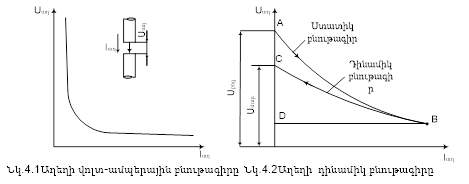
Եթե
A կետից հոսանքն
արագ կերպով փոքրացնենք,
ապա կստանանք աղեղի
դինամիկ բնութագիրը
( BC, նկ.4.2 ): Վերջինիս
ամեն մի կետում
աղեղն անկայուն
է բոցավառվում
և հոսանքի 0 արժեքի
դեպքում մարում
է, որն էլ կոչվում
է մարման լարում
(![]() ):
):
Ինչպես երևում է գրաֆիկից ( նկ.4.2 ), հոսանքի մեծացման հետևանքով աղեղի լարման փոքրացումը շարունակվում է մինչև A կետը, այնուհետև հոսանքի մեծացումից աղեղի լարումն այլևս չի փոքրանում: A կետը բնորոշվում է նրանով, որ հոսանքի հետագա մեծացման դեպքում առաջանում է լիցքավորված մասնիկների այնքան ավելացում, որը հավասար է իոնազերծման հետևանքով լիցքավորված մասնիկների կորստին:
Դինամիկ բնութագրի դիրքը կախված է հոսանքի փոփոխման արագությունից . եթե հոսանքը շատ արագ փոքրացնենք, ապա դինամիկ բնութագիրը կունենա հորիզոնական դիրք (նկ. 4.2):
Աղեղի
![]() լարումը
կարող ենք որոշել
հետևյալ հավասարումից`
կախված կոնտակտների
նյութից, հեռավորությունից
և նրանց միջով
անցնող հոսանքի
մեծությունից.
լարումը
կարող ենք որոշել
հետևյալ հավասարումից`
կախված կոնտակտների
նյութից, հեռավորությունից
և նրանց միջով
անցնող հոսանքի
մեծությունից.
![]() , (4.1)
, (4.1)
որտեղ
![]() -ն,
-ն,
![]() -ն,
-ն,
![]() -ն,
-ն,
![]() -ն
հաստատուն գործակիցներ
են և կախված են
կոնտակտի նյութից,
-ն
հաստատուն գործակիցներ
են և կախված են
կոնտակտի նյութից,
![]() -ն
կոնտակտների միջև
եղած հեռավորությունն
է, իսկ
-ն
կոնտակտների միջև
եղած հեռավորությունն
է, իսկ ![]() -
ը ` աղեղով անցնող
հոսանքն է:
-
ը ` աղեղով անցնող
հոսանքն է:
Պղնձի
համար` ![]() =
20.8,
=
20.8, ![]() =
4.62,
=
4.62, ![]() =
20.97,
=
20.97, ![]() =
12.17:
=
12.17:
Ալյումինի
համար`![]() =
14.19,
=
14.19, ![]() =
3.64,
=
3.64, ![]() =
19.01,
=
19.01, ![]() =11.36:
=11.36:
4.3 .ԱՂԵՂԻ ՄԱՐՈՒՄԸ ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԴԵՊՔՈՒՄ
Հաստատուն հոսանքի աղեղի մարումը հնարավոր է այն դպեքում, երբ աղեղային միջավայրում իոնազերծման պրոցեսն ավելի արագ է ընթանում, քան իոնացմանը:
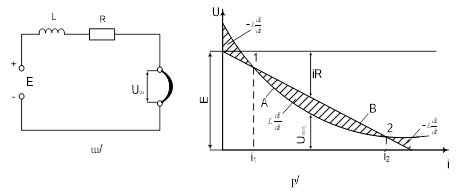
Աղեղի մարման պայմանը վերջնականապես պարզելու համար վերցնենք մի էլեկտրական շղթա, որը սնում է աղեղային միջավայրը, ակտիվ և ինդուկտիվ դիմադրություն ունեցող հաստատուն հոսանքի աղբյուրից (նկ.4.3, ա):
Շղթայի լարման հաշվեկշռի հավասարումը կլինի
![]()
|
Նկ. 4.3 Հաստատուն հոսանքի աղեղի մարման պայմանների բնութագիրը |
A կորը աղեղի ՎԱ բնութագիրն է, B ուղիղ գիծը` iR լարման անկումը կամ E – iR տարբերությունը:
Ինչպես
երևում է գրաֆիկից
( նկ.4.3, բ), ![]() -ն
կարող է լինել
դրական, բացասական
կամ 0:
-ն
կարող է լինել
դրական, բացասական
կամ 0: ![]() - ն դրական
է այն բոլոր կետերի
համար, որոնք ընկած
են 1 և 2 կետերի միջև;
- ն դրական
է այն բոլոր կետերի
համար, որոնք ընկած
են 1 և 2 կետերի միջև;
![]() -ն բացասական
է այն բոլոր կետերի
համար, որոնք գտնվում
են i1 –ից ձախ և
i2 –ից աջ:
-ն բացասական
է այն բոլոր կետերի
համար, որոնք գտնվում
են i1 –ից ձախ և
i2 –ից աջ: ![]() ,
երբ
,
երբ ![]() ,
1 և 2 կետերի համար:
Այդ կետերում աղեղը
կայուն վառվում
է: Աղեղի մարումը
հնարավոր է հոսանքի
փոքրացումով, այսինքն`
,
1 և 2 կետերի համար:
Այդ կետերում աղեղը
կայուն վառվում
է: Աղեղի մարումը
հնարավոր է հոսանքի
փոքրացումով, այսինքն`
![]() - ն:
Այս պայմանը հնարավոր
է, եթե
- ն:
Այս պայմանը հնարավոր
է, եթե
![]()
Այս
անհավասարությունը
տեղի ունի i2
–ից մեծ և i1 –ից
փոքր հոսանքների
դեպքում: i2 –ից
մեծ հոսանքի դեպքում
![]() - ի արժեքը
բացասական է, և
հոսանքը ընդհանուր
շղթայում փոքրանում
է: Հոսանքի փոքրացումը
կատարվում է մինչև
i2 , իսկ հետո դադարում`
i1 = i2 պահին:
Աղեղը կայուն բոցավառվում
է:
- ի արժեքը
բացասական է, և
հոսանքը ընդհանուր
շղթայում փոքրանում
է: Հոսանքի փոքրացումը
կատարվում է մինչև
i2 , իսկ հետո դադարում`
i1 = i2 պահին:
Աղեղը կայուն բոցավառվում
է:
Հոսանքի
հետագա փոքրացումն
այս կամ այն եղանակով
![]() - ն բերում
է դրական գոտի,
որի հետևանքով
հոսանքը սկսում
է աճել և նորից
վերադառնում
2 կետը: Եթե հոսանքի
մեծությունը դառնա
i1 –ից փոքր, ապա
- ն բերում
է դրական գոտի,
որի հետևանքով
հոսանքը սկսում
է աճել և նորից
վերադառնում
2 կետը: Եթե հոսանքի
մեծությունը դառնա
i1 –ից փոքր, ապա
![]() - ն կընկնի
բացասական գոտի,
որը կհանգեցնի
հոսանքի փոքրացման
մինչև 0 արժեքը
(աղեղը կմարի ) : Այսպիսով
, 2 կետը աղեղի կայուն
բոցավառման կետ
է, իսկ 1-ը` ոչ կայուն:
Անհրաժեշտ է , որ
անհավասարությունը
տեղի ունենա i1
–ից փոքր հոսանքի
դեպքում:
- ն կընկնի
բացասական գոտի,
որը կհանգեցնի
հոսանքի փոքրացման
մինչև 0 արժեքը
(աղեղը կմարի ) : Այսպիսով
, 2 կետը աղեղի կայուն
բոցավառման կետ
է, իսկ 1-ը` ոչ կայուն:
Անհրաժեշտ է , որ
անհավասարությունը
տեղի ունենա i1
–ից փոքր հոսանքի
դեպքում:
Բոլոր երևույթների ժամանակ աղեղը վերջնականապես մարելու համար անհրաժեշտ է , որ աղեղի ՎԱ բնութագիրը բարձր գտնվի լարման անկման գծից (նկ.4.4):
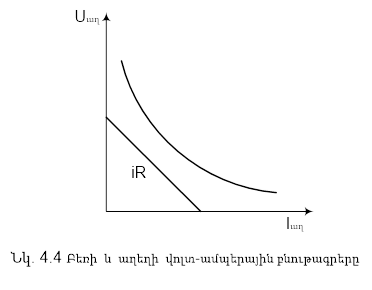
ՎԱ բնութագրի բարձրացումը կատարվում է մի քանի եղանակով. կոնտակտների միջև եղած հեռավորությունը մեծացնելով, աղեղային միջավայրում ուժեղ մագնիսական դաշտ և մագնիսական փչում ստեղծելով:
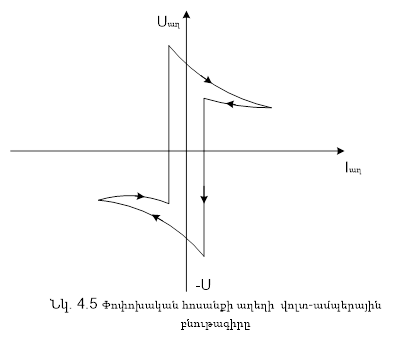
ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ԱՂԵՂ
Փոփոխական հոսանքի էլեկկտրական աղեղը հաստատուն հոսանքի աղեղից տարբերվում է նրանով, որ աղեղում հոսանքը և լարումը յուրաքանչյուր կիսապարբերությունում անցնում են 0 արժեքով: Դա է պատճառը, որ փոփոխական հոսանքի ՎԱ բնութագիրն ունի նկ. 4.5-ում պատկերված տեսքը:
Եթե
փոփոխական հոսանք
անջատող ապարատի
կոնտակտների միջև
առաջանում է աղեղ,
ապա հոսանքի յուրաքանչյուր
0 արժեքի դեպքում
տեղի է ունենում
աղեղի մարում միայն
այն դեպքում, երբ
հոսանքն իր 0 արժեքից
անցնելիս շղթայի
լարումը փոքր
լինի աղեղի բոցավառման
լարումից, ապա
աղեղը վերջնականապես
կմարի: Սրանից
հետևում է, որ այն
շղթաներում, որոնցում
միայն ակտիվ դիմադրություն
կա` ![]() ,
հոսանքի 0 արժեքի
համար լարումը
նույնպես հավասար
է 0-ի, և աղեղը մարում
է ավելի հեշտ, քան
ինդուկտիվ բեռնավորման
դեպքում, երբ հոսանքը
0 արժեքից անցնելիս
լարումն ունի որոշակի
մեծություն:
,
հոսանքի 0 արժեքի
համար լարումը
նույնպես հավասար
է 0-ի, և աղեղը մարում
է ավելի հեշտ, քան
ինդուկտիվ բեռնավորման
դեպքում, երբ հոսանքը
0 արժեքից անցնելիս
լարումն ունի որոշակի
մեծություն:
Փոփոխական հոսանքի աղեղի մարումը վերջնականա-պես կարող ենք ձևակերպել հետևյալ կերպ:
Եթե հոսանքն իր 0 արժեքից անցնելուց հետո աղեղային միջավայրում թուլանում է իոնացման պրոցեսը կամ մեծանում է աղեղային միջավայրի էլեկտրական ամրությունն այնպես, որ այն միշտ մեծ է լինում աղեղի լարումից, ապա աղեղը վերջնականապես մարում է:
Փոփոխական հոսանքի էլեկտրական աղեղը, ինչպես և հաստատունինը, վերջնականապես կարող է մարվել այն դեպքում, երբ իոնազերծման պրոցեսները գերազանցում են իոնացման պրոցեսներին (լիցքավորված մասնիկները աղեղային միջակայքում պակասում են):
Փոփոխական հոսանքի աղեղը կարող է մարվել երկու սկզբունքորեն ժամանակի տարբեր պահերին` կիսապարբերության միջին մասերում, երբ միջին հոսանքը մեծ է, և երբ հոսանքը անցնում է զրո կետով: Առաջին դեպքում աղեղի մարման պրոցեսը շատ նման է հաստատուն հոսանքի աղեղի մարման պրոցեսին: Մեծամասամբ աղեղը մարվում է այն դեպքում, երբ հոսանքն անցնում է զրո կետով: Այդ ժամանակ էներգիայի մատակարարումը դեպի աղեղ դադարում է, և նրա ջերմաստիճանը խիստ ընկնում է: Մի որոշ ժամանակի ընթացքում, քանի դեռ հոսանքը մոտ է զրոյին, իոնիզացման ինտենսիվությունը նվազում է: Աղեղային միջակայքը այդ ժամանակ կորցնում է իր հաղորդականությունը, և աղեղը մարվում է: Յուրաքանչյուր կիսապարբերության սկզբում և վերջում հոսանքը շեղվում է իր սինուսի ձևից: Այդ ժամանակ աղեղային միջակայքի դիմադրությունը այնքան է մեծանում, որ տեղի է ունենում հոսանքի խիստ փոքրացում: Հոսանքն իր զրո կետով անցնելու պահից մի փոքր ավելի շուտ և հաջորդ կիսապարբերության սկզբում գործնականում հավասար է լինում զրոյի: Գրաֆիկորեն այն ունի այս տեսքը (նկ.4.6.): Հոսանքի` զրոյով անցնելու պահին աղեղային միջակայքը հաղոդիչից վերածվում է դիէլեկտրիկի: Մեծանում է միջակայքի էլեկտրական ամրությունը (a1b1; a2b2), այսինքն` այն լարումը, որի դեպքում տեղի է ունենում միջակայքի էլեկտրական ծակում: Դրա հետ միաժամանակ մեծանում է նաև կոնտակտների վրայի լարումը: Եթե էլեկտրական ամրությունն աճում է ավելի արագ, քան կոնտակտների վրայի կամ աղեղային միջավայրի լարումը, ապա աղեղը կմարվի:
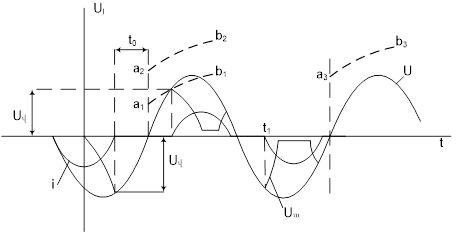
Նկ. 4.6 Փոփոխական հոսանքի աղեղի մարման բնութագիրը
Իսկ եթե աղեղային միջակայքի լարումը ժամանակի որոշ պահին դառնում է ավելի մեծ միջակայքի էլէկտրական ամրությունից, ապա աղեղը նորից առաջանում է: Եթե էլեկտրական ամրությունն աճի a1b1 կորով, աղեղը կառաջանա, իսկ a2b2 կորի դեպքում աղեղ չի առաջանա:
4.4 . ԷԼԵԿՏՐԱԿԱՆ ԱՂԵՂԱ ՄԱՐԻՉ ՍԱՐՔԵՐ
Անջատող ապարատում կոնտակտների միջև առաջացած աղեղն արագ կերպով մարելու համար օգտագործում են աղեղարիչ սարքեր:
Էլեկտրական աղեղի մարումը կարելի է արագացնել աղեղային միջավայրի իոնազերծման պրոցեսն ինտենսիվացնելով: Այն կարելի է իրագործել հետևյալ եղանակներով.
1) աղեղի երկարությունը մեծացնելով,
2) էլեկտրամագնիսական փչումով շրջապատող օդում աղեղի շարժումն ինտենսիվացնելով,
3) աղեղային միջավայրւմ աղեղի երկայնական կամ լայնական ուղղությամբ աղեղի էներգիայի հաշվին գազային ուժեղ հոսք ստեղծելով (այդպիսի սարքերը կոչվում են ինքնափչման սարքեր ),
4) արտաքին աղբյուրի օգնությամբ աղեղային միջավայրում աղեղի երկայնական կամ լայնական ուղղությամբ մեծ ճնշման տակ օդի կամ յուղի հոսք ստեղծելով,
5) աղեղը մի շարք կարճ աղեղների բաժանելով:
Բոլոր նման սարքերում աղեղի մարումն իրագործվում է այն դեպքում, երբ շրջապատող միջավայրը ակտիվ կերպով ներգործում է աղեղի վրա: Այդ միջավայրը կարող է լինել գազային (օդը), հեղուկ (յուղը), պինդ (ֆիբր, օրգանական ապակի և այլն):
Որքան աղեղային միջավայրը ինտենսիվ է ներգործում աղեղի վրա, որքան աղեղն արագ է տեղափոխվում այդ միջավայրում, այնքան նրա մարումն արագանում է: Մարող միջավայրի ներգործությունն աղեղի վրա իրագործվում է կամ աղեղից անջատված, կամ օտար աղբյուրից ստացված էներգիայի հաշվին:
Կախված աղեղի մարման ձևից ` սարքերը բաժանվում են չորս խմբի.
ա) սարքեր, որոնցում մարումն իրագործվում է աղեղից անջատված էներգիայի հաշվին,
բ) սարքեր, որոնցում աղեղի մարումն իրագործվում է օտար աղբյուրից ստացված էներգիայի հաշվին,
գ) սարքեր, որոնք աշխատում են կարճ աղեղներ ստանալու սկզբունքով,
դ) սարքեր, որոնցում աղեղի մարումը կատարվում է նրան զուգահեռ միացված դիմադրության միջոցով:
Աղեղամարիչ սարքերին ներկայացվում են հետևյալ պահանջները.
ա) մարումը պետք է կատարվի հնարավորին չափ կարճ ժամանակամիջոցում,
բ) շղթան անջատելիս աղեղից արտադրվող էներգիան պետք է լինի նվազագույնը,
գ) աղեղի մարման ժամանակ գերլարումներ չպետք է առաջանան:
Առաջին պայմանը կարելի է իրագործել աղեղի ինտենսիվ մարման և կոնտակտների արագ հեռացման միջոցով, երկրորդը` աղեղի դիմադրությունը արագ մեծացնելով, իսկ երրորդը` աղեղի դիմադրության մեծացումով` հոսանքի նվազագույն արժեքի դեպքում:
4.5 . ԱՂԵՂԱՄԱՐԻՉ ԻՆՔՆԱՓՉՎՈՂ ՍԱՐՔԵՐ
Այսպիսի սարքերը ըստ աղեամարիչ միջավայրի բաժանվում են երկու խմբի` հեղուկ միջավայրում աղեամարիչ սարքեր և կարծր միջավայրում աղեղարիչ սարքեր:
Դիտարկենք առաջին խումբը, որն իր հերթին բաժանվում է երկու ենթախմբի.
ա) առանց աղեղամարիչ խցերի` ազատ յուղային միջավայրում,
բ) աղեղամարիչ խցերով:
Ազատ յուղային միջավայրում աղեղամարիչ բաքը կունենա հետևյալ տեսքը ( նկ. 4.7)
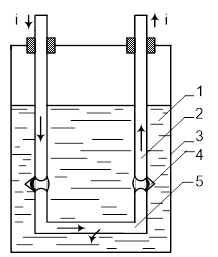
Նկ. 4.7 Յուղային միջավայրում աղեղամարիչ
1-տրանսֆորմատորային յուղ, 2-շարժական
կոնտակտ,3-բաք, 4-աղեղ, 5- անշարժ կոնտակտ
Այս տիպի համակարգերն օգտագործում են մինչև 10 կՎ լարումների համար:
Աղեղամարիչ խցերով համակարգը կունենա հետևյալ տեսքը ( նկ. 4.8 ):
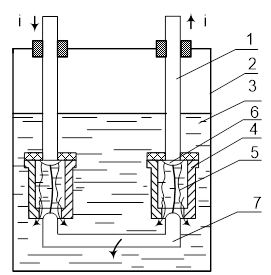
Նկ. 4.8 Աղեղամարիչ խցիկներով յուղային անջատիչ
1-շարժական կոնտակտ, 2- բաք, 3-տրանսֆորմատորային յուղ,
4-աղեղամարող խուց, 5- գազային փուչիկ, 6,7 – անշարժ կոնտակտներ
Այս համակարգը պողպատից պատրաստած բաք է` լցված տրանսֆորմատորային յուղով: Բաքի մեջ տեղավորված են շարժական ու անշարժ կոնտակտներ ու մեկուսիչ նյութից կազմված խուց: Օգտագործում են 10 կՎ-ից բարձր լարումների համար:
Աշխատում է հետևյալ սկզբունքով. անջատման ժամանակ, երբ կոնտակտներն իրարից հեռանում են, դրանց միջև առաջանում է աղեղ: Աղեղի բարձր ջերմաստիճանի շնորհիվ (60000-120000) նրան շրջապատող յուղը արագ կերպով այրվում է, առաջացած գազերը պատում են աղեղը և նրա շուրջը ստեղծում գազային փուչիկ, որտեղ էլ աղեղն այրվում է: Այրման ընթացքում առաջանում են ջրածին և ացետիլեն գազ: Ջրածինն ունի մեծ ջերմահաղորդականություն, ուստի սառեցնում է աղեղի մակերեսը և այն իոնազերծվում է: Աղեղի մարմանը նպաստում է նաև այն ճնշումը, որն առաջանում է գազային փուչիկում ( 5-10 մթն.):
Դիտարկենք երկրորդ խումբը:
Այս խմբի աղեղի մարման խուցը պատրաստում են ֆիբրից կամ օրգանական ապակուց: Երբ խցում աղեղ է առաջանում, նրա ստեղծած բարձր ջերմաստիճանի շնորհիվ այստեղ անջատվում են մեծ քանակությամբ գազեր: Դրանք մեծ ճնշման տակ ազդում են աղեղի երկայնական կամ լայնական ուղղությամբ, ստեղծում գազային փչում, և աղեղը հեշտությամբ մարում: Սարքն ունի հետևյալ տեսքը ( նկ.4.9 ):
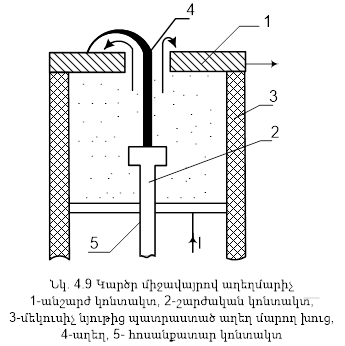
Այս սկզբունքն օգտագործում են հզորության բաժանիչներում, որոնք թույլ են տալիս անջատելու բեռնավորման տակ բարձր լարման գիծը:
ՀԻՆԳԵՐՈՐԴ ԳԼՈՒԽ
5. ԷԼԵԿՏՐԱՄԱԳՆԻՍՆԵՐ
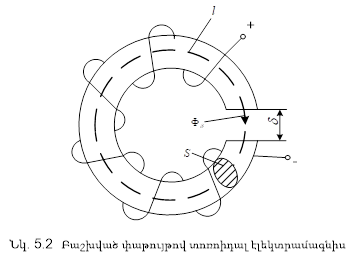
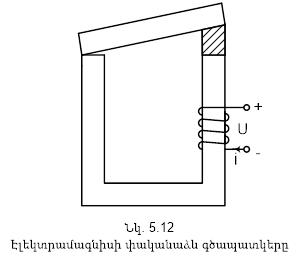
Էլեկտրամագնիսական ապարատները այն սարքերն են, որտեղ էլեկտրական էներգիան վերածվում է մագնիսական էներգիայի, որի շնորհիվ կատարվում է մեխանիկական աշխատանք (նկ.5.1):
Կառավարման փաթույթը կոչվում է ընկալող օրգան: Երբ փաթույթին տրվում է կառավարման ազդանշան (լարում կամ հոսանք), փաթույթը ստեղծում է մագնիսական հոսք, որը մագնիսալարի միջոցով կենտրոնացվում է և ուղղորդվում դեպի աշխատանքային օդային բացակ: Օդային բացակում առաջանում է ձգող ուժ, որի հետևանքով խարիսխը ձգվում է միջուկի կողմից` կատարելով աշխատանք: Կախված փաթույթին մատուցվող լարումից` հաստատուն թե փոփոխական, էլեկտրական ապարատները դասակարգվում են` հաստատուն հոսանքի և փոփոխական հոսանքի: Մագնիսալարն ուժեղացնում և ուղղորդում է փաթույթի կողմից ստեղծած մագնիսական հոսքերը:
5.1. ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ՄԱԳՆԻՍԱԿԱՆ
ՇՂԹԱՅԻ ՀԱՇՎԱՐԿԸ
Մագնիսական շղթա կոչվում են էլեկտրական ապարատների այն ֆեռոմագնիսական մասերը, դրանց թվում նաև օդային միջավայրի միակցությունը, որոնք ծառայում են մագնիսական հոսքն ուժեղացնելու ու այդ հոսքն իրենց միջով անցկացնելու համար, և կարող են դիտվել որպես մագնիսական խողովակ (նկ.5.1):
Մագնիսական շղթաներ օգտագործվում են տեխնիկայի տարբեր բնագավառներում (էլեկտրադինամիկական մեխանիզմներում, որոնց մագնիսական էներգիան վեր են ածում մեխանիկականի, էլեկտրական չափիչ սարքերում, էլեկտրական մեքենաներում, տրանսֆորմատորներում, տարրական մասնիկների արագացուցիչներում):
Մագնիսական շղթայի հաշվարկի հիմնական խնդիրներից մեկն է գտնել այն կապը, որ գոյություն ունի տվյալ համակարգի մագնիսական հոսքի և մագնիսական ուժի միջև: Էլեկտրական ապարատների մագնիսական շղթայի հաշվարկները հիմնականում կատարվում են Կիրխհոֆի երկու և Օհմի օրենքների հիման վրա` գրված մագնիսական շղթայի համար:
I օրենք: Մագնիսական շղթայի յուրաքանչյուր կետում ներս մտնող և դուրս եկող հոսքերի հանրահաշվական գումարը հավասար է զրոյի
∑ Φ = 0: (5.1)
II օրենք: Փակ կոնտուրի համար մագնիսական անկումների և մագնիսաշարժ ուժերի հանրահաշվական գումարը հավասար է զրոյի.
![]() ,
(5.2)
,
(5.2)
որտեղ ![]() -ն մագնիսական շղթայի տարրական մասի մագնիսական դիմադրությունն է,
-ն մագնիսական շղթայի տարրական մասի մագնիսական դիմադրությունն է, ![]() – ն`
հոսքը, իսկ
– ն`
հոսքը, իսկ
![]() -ն` մագնիսական պոտենցիալի
անկումը:
-ն` մագնիսական պոտենցիալի
անկումը:
Մագնիսական հոսքի մեծ մասն անցնում է տվյալ համակարգի օդային բացակով: Այդ
հոսքը կոչվում է աշխատանքային հոսք կամ երբեմն`բանվորական
օդային բացակով անցնող հոսք` ![]() կամ
կամ ![]() աշխատանքային:
աշխատանքային:
Լրիվ հոսքի մի մասն էլ փակվում է մագնիսացվող կոճի եզրով, առանց օդային բացակով անցնելու, և կոչվում է ցրման հոսք (նկ. 5.1):
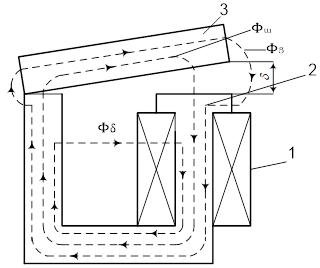
Նկ. 5.1. Էլեկտրամագնիսի պայմանական պատկեր
Φա – աշխատանքային հոսք, ΦՑ – ծայրամասային հոսք, Φδ – ցրման հոսք
1-կառավարման փաթույթ, 2- ֆեռոմագնիսական միջուկ կամ մագնիսալար, 3- շարժական մաս -խարիսխ
Բացի ցրման հոսքերից, գոյություն ունեն նաև ծայրամասային հոսքեր, որոնք նույնպես չեն անցնում օդային բացակով:
Մագնիսական շղթայի հաշվարկը կարելի է կատարել` հաշվի առնելով ցրման հոսքերը կամ ցրման հոսքերը հաշվի չառնելով: Երկրորդ դեպքում հաշվարկը խիստ հեշտանում է, իսկ առաջին դեպքում` դժվարանում: Առանց ցրման հոսքի կարելի է հաշվել օղակաձև մագնիսական շղթաները, երբեմն Ш-աձև շղթաները, որոնցում ցրման հոսքերը քիչ են, և դրանք կարելի է անտեսել:
Յուրաքանչյուր մագնիսական շղթայի հաշվարկի նպատակն է տրված աշխատանքային հոսքի դեպքում որոշել տվյալ համակարգում գործող մագնիսական ուժը: Այս խնդիրը կոչվում է ուղիղ: Իսկ երբ անհրաժեշտ է տրված մագնիսաշարժ ուժի դեպքում որոշել աշխատանքային բացակով անցնող հոսքը, խնդիրը կոչվում է հակառակ: Ուղիղ խնդրի լուծումն ավելի հեշտ է:
Էլեկտրամագնիսական կոճերը կարող են սնվել հաստատուն կամ փոփոխական հոսանքով, դրան համապատասխան ունենք. ա) հաստատուն հոսանքի մագնիսական շղթաներ, բ) փոփոխական հոսանքի մագնիսական շղթաներ: Կան նաև հաստատուն մագնիսների մագնիսական շղթաներ:
5.2. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ՄԱԳՆԻՍԱԿԱՆ ՇՂԹԱՅԻ ՀԱՇՎԱՐԿԸ
Առանց ցրման հոսքի` ![]() :
:
Լուծենք ուղիղ խնդիրը (նկ.5.2):
Տրված են էլեկտրամագնիսի չափերը, աշխատանքային բացակով անցնող հոսքը (![]() ):
Պետք է գտնել համակարգի մագնիսաշարժ ուժը`
):
Պետք է գտնել համակարգի մագնիսաշարժ ուժը`![]() :
:
Օգտվենք Կիրխհոֆի 2-րդ օրենքից
![]() ,
(5.3)
,
(5.3)
![]() կամ
կամ ![]() ,
,
որտեղ ![]() -ն օդային բացակի մագնիսական հաղորդակա-նությունն է,
-ն օդային բացակի մագնիսական հաղորդակա-նությունն է,
![]() -
օդի մագնիսական
թափանցելիությունն
է: Միջուկի մագնիսական դիմադրությունը`
-
օդի մագնիսական
թափանցելիությունն
է: Միջուկի մագնիսական դիմադրությունը`
![]() ,
որտեղ
,
որտեղ ![]() :
:
(5.3)-ի մեջ տեղադրելով ![]() -ի և
-ի և ![]() -ի արժեքները կստանանք`
-ի արժեքները կստանանք`
![]() ,
,
կամ
![]() (5.4)
(5.4)
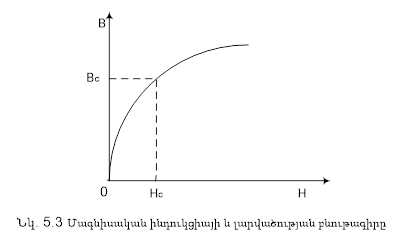
![]() –ն որոշում են տվյալ նյութի մագնիսացման կորից (նկ.5.3)
–ն որոշում են տվյալ նյութի մագնիսացման կորից (նկ.5.3)
Ուղիղ խնդիրը լուծվում է հետևյալ հաջորդականությամբ.
ա)
![]() ,
,
բ)
![]() -ն
որոշում
են, օգտվելով մագնիսացման
կորից
-ն
որոշում
են, օգտվելով մագնիսացման
կորից
գ)
ստացված մեծությունները
( ![]() և
և
![]() )
տեղադրել
(5.4) բանաձևում:
)
տեղադրել
(5.4) բանաձևում:
Այժմ
դիտարկենք հակառակ
խնդիրը: Տրված
է ![]() -ը
: Պետք
է որոշել
-ը
: Պետք
է որոշել ![]() -ն:
-ն:
Այս խնդիրը կարելի է լուծել երկու եղանակով.
ա) գրաֆավերլուծական և բ) հաջորդական մոտեցման:
Գրաֆավերլուծական եղանակով լուծում ենք հետևյալ հաջորդականությամբ.
ա) նախ որոշում ենք համակարգի տեսակարար մագնիսաշարժ ուժը`
![]() ,
,
բ) օդային բացակի մագնիսական հաղորդականությունը`
![]()
![]() առանցքի
վրա տեղադրում
ենք
առանցքի
վրա տեղադրում
ենք ![]() -ը
-ը
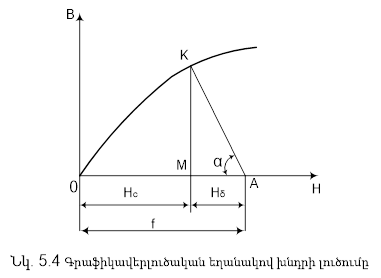
գ)
A կետից ![]() անկյան
տակ տանում ենք
ուղիղ` մինչև կորի
K կետի հետ հատվելը
/ նկ.5.4 /:
անկյան
տակ տանում ենք
ուղիղ` մինչև կորի
K կետի հետ հատվելը
/ նկ.5.4 /:
Որոշում
ենք ![]() -ն.
-ն.
![]() ,
,
որտեղ
![]() -ը
և
-ը
և ![]() -ն H և B առանցքների
մասշտաբի գործակիցներն
են,
-ն H և B առանցքների
մասշտաբի գործակիցներն
են,
դ)
K-ից ուղղահայաց
ենք իջեցնում M
կետին: ![]()
![]() -ն
միջուկի
մագնիսական դաշտի
լարվածությունն
է , իսկ
-ն
միջուկի
մագնիսական դաշտի
լարվածությունն
է , իսկ ![]() -ն` օդային
բացակի մագնիսական
դաշտի H լարվածությունը`
բերված միջուկի
երկարությանը:
KM-ը միջուկի ինդուկցիան
է:
-ն` օդային
բացակի մագնիսական
դաշտի H լարվածությունը`
բերված միջուկի
երկարությանը:
KM-ը միջուկի ինդուկցիան
է:
ե)
![]() :
Ապացուցելու համար
գրենք Կիրխհոֆի
2-րդ օրենքը տվյալ
շղթայի համար.
:
Ապացուցելու համար
գրենք Կիրխհոֆի
2-րդ օրենքը տվյալ
շղթայի համար.
![]() :
:
Երկու
մասերը բաժանելով
![]() -ի
կստանանք.
-ի
կստանանք.
![]() ,
,
կամ
![]() ,
,
որտեղ
![]() ,
,
իսկ
![]() ,
,
որտեղից
![]() :
:
Հետևաբար`
![]()
Հաջորդական մոտեցման եղանակը հետևյալն է:
Դիցուք
տրված է մագնիսաշարժ
ուժը ` ![]() ,
և պահանջվում է
որոշել համակարգի
աշխատանքային
օդային բացակով
անցնող հոսքը`
,
և պահանջվում է
որոշել համակարգի
աշխատանքային
օդային բացակով
անցնող հոսքը`
![]() :
:
Օդային
բացակին տալիս
ենք հոսքի մի քանի
կամայական արժեքներ`
![]() …և
այլն: Ուղիղ եղանակով
որոշում ենք այդ
հոսքերին համապատասխանող
մագնիսաշարժ ուժերը`
…և
այլն: Ուղիղ եղանակով
որոշում ենք այդ
հոսքերին համապատասխանող
մագնիսաշարժ ուժերը`
![]() …
և ստացված տվյալներով
կառուցում կոր
`
…
և ստացված տվյալներով
կառուցում կոր
` ![]() (նկ.5.5):
(նկ.5.5):
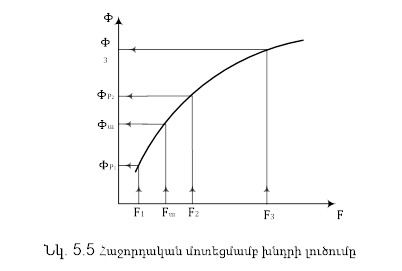
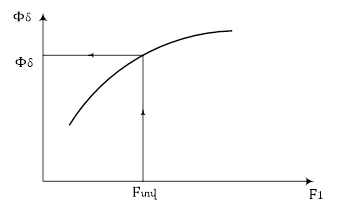
Տրված
մագնիսաշարժ ուժի
(![]() )
համար կորից որոշում
ենք օդային բացակով
անցնող հոսքը (
)
համար կորից որոշում
ենք օդային բացակով
անցնող հոսքը (
![]() ):
):
5.3. ՄԱԳՆԻՍԱԿԱՆ ՇՂԹԱՅԻ ՀԱՇՎԱՐԿԸ ՑՐՄԱՆ ՀՈՍՔՈՎ
Այն
դեպքում, երբ ցրման
հոսքը ( ![]() )
ընդհանուր
հոսքից 10%-ով ավելի
է, հաշվարկը պետք
է կատարել ցրման
հոսքով: Դիտարկենք
П-աձև էլեկտրամագնիս,
որի փաթույթը կենտրոնացված
է հիմքում (նկ.5.6):
)
ընդհանուր
հոսքից 10%-ով ավելի
է, հաշվարկը պետք
է կատարել ցրման
հոսքով: Դիտարկենք
П-աձև էլեկտրամագնիս,
որի փաթույթը կենտրոնացված
է հիմքում (նկ.5.6):
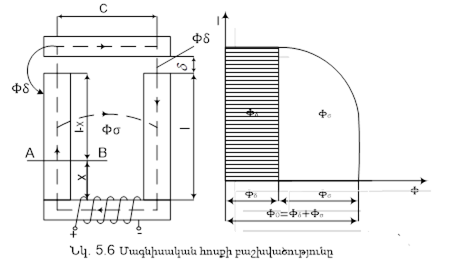
Տրված
է աշխատանքային
օդային բացակով
անցնող ![]() ,
պահանջվում է որոշել
համակարգի մագնիսաշարժ
ուժը (F) : Գծենք մագնիսական
հոսքի տարածման
պատկերը: Այստեղ
,
պահանջվում է որոշել
համակարգի մագնիսաշարժ
ուժը (F) : Գծենք մագնիսական
հոսքի տարածման
պատկերը: Այստեղ
![]() -ն
օդային բացակով
անցնող կամ աշխատանքային
հոսքն է,
-ն
օդային բացակով
անցնող կամ աշխատանքային
հոսքն է, ![]() `
օդային բացակի
ծայրամասային
հոսքը,
`
օդային բացակի
ծայրամասային
հոսքը, ![]() `
ցրման հոսքը: Ինչպես
երևում է նկ.5.6-ից,
մագնիսական շղթայի
յուրաքանչյուր
հատույթով անցնող
հոսքն ունի տարբեր
արժեքներ: Օրինակ,
A-B հայտույթով անցնող
հոսքը`
`
ցրման հոսքը: Ինչպես
երևում է նկ.5.6-ից,
մագնիսական շղթայի
յուրաքանչյուր
հատույթով անցնող
հոսքն ունի տարբեր
արժեքներ: Օրինակ,
A-B հայտույթով անցնող
հոսքը` ![]() ,
այդ պատճառով
էլ այսպիսի շղթայի
հաշվարկը խիստ
բարդանում է:
,
այդ պատճառով
էլ այսպիսի շղթայի
հաշվարկը խիստ
բարդանում է:
Նշված համակարգերի հաշվարկը կարելի է կատարել մի քանի եղանակով.
1) վերլուծական,
2) մասերի բաժանման,
3) գրաֆիկական,
4) ցրման գործակիցների:
Հաշվարկը կատարենք 2-րդ և 4-րդ մեթոդներով:
Մասերի բաժանման մեթոդ: Այս մեթոդի էությունն այն է, որ ամբողջ մագնիսական շղթան բաժանում են մի շարք մասերի և կազմում տվյալ մագնիսական շղթայի տեղակայման սխեման /(նկ.5.7 և 5.8):
Տեղակայման
սխեման այն ուղին
է, որով անցնում
է մագնիսական հոսքը:
Այդ սխեմայում
տեղադրում ենք
յուրաքանչյուր
մասի մագնիսական
դիմադրությունը,
ինչպես նաև մագնիսաշարժ
ուժի աղբյուրը:
Ծայրամասային
հոսքը (![]() )
ներկա դեպքում
անտեսում ենք:
Օդային բացակի
և ցրման հոսքի
մագնիսական դիմադրությունները
որոշում ենք` ելնելով
օդային բացակի
և մագնիսական
համակարգի երկրաչափական
չափերից:
)
ներկա դեպքում
անտեսում ենք:
Օդային բացակի
և ցրման հոսքի
մագնիսական դիմադրությունները
որոշում ենք` ելնելով
օդային բացակի
և մագնիսական
համակարգի երկրաչափական
չափերից:
Դիցուք մագնիսական համակարգը բաժանել ենք երեք մասի, այդ դեպքում նրա տեղակայման սխեման կունենա նկ. 5.8-ում պատկերված տեսքը:
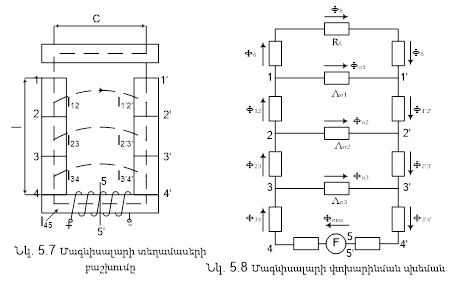
Հաշվարկի ժամանակ ընդունում ենք , որ մագնիսական շղթայի յուրաքանչյուր հատվածում մագնիսական հոսքի մեծությունը մնում է անփոփոխ, այսինքն` մագնիսական (4) հատույթի մակերեսից մինչև (3) հատույթի մակերեսն հասնելն իր արժեքը չի փոխում:
Դիցուք
տրված է օդային
բացակով անցնող
![]() հոսքը
պահանջվում է որոշել
համակարգի մագնիսաշարժ
ուժը ( F ):
հոսքը
պահանջվում է որոշել
համակարգի մագնիսաշարժ
ուժը ( F ):
Հաշվարկը կատարում ենք հետևյալ հաջորդականությամբ. նախ որոշում ենք բանվորական օդային բացակի աշխատանքային մագնիսական դիմադրությունը`
![]() ,
հետո խարսխինը`
,
հետո խարսխինը`
![]()
Ցրման
հոսքից ստացված
հաղորդականությունը
նշանակենք ![]() -ով:
Վերջինս գտնելու
համար նախ համապատասխան
աղյուսակներից
որոշում ենք տեսակարար
հաղորդականությունը`
-ով:
Վերջինս գտնելու
համար նախ համապատասխան
աղյուսակներից
որոշում ենք տեսակարար
հաղորդականությունը`
![]() -ն,
այսինքն`ցրման
հոսքի մեկ միավոր
երկարությանը
համապատասխանող
հաղորդականությունը:
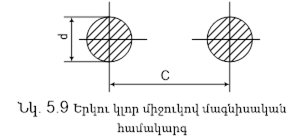
Տրված համակարգի
համար (նկ.5.9) դա կլինի.
-ն,
այսինքն`ցրման
հոսքի մեկ միավոր
երկարությանը
համապատասխանող
հաղորդականությունը:
Տրված համակարգի
համար (նկ.5.9) դա կլինի.

![]() :
:
Օգտվելով Կիրխհոֆի 2-րդ օրենքից` որոշենք 1-1’ կետերի միջև եղած մագնիսական պոտենցիալների տարբերությունը`
![]()
որտեղ ![]() -ն
և
-ն
և ![]() -ն
մագնիսական անկումներն
են համապատասխան
մասերում:
-ն
մագնիսական անկումներն
են համապատասխան
մասերում:
Որոշում
ենք ![]() -ն
և
-ն
և ![]() -ն: Իմանալով
-ն: Իմանալով
![]() -ը` որոշում
ենք
-ը` որոշում
ենք ![]() -ը
և
-ը
և ![]() -ը
կամ
-ը
կամ ![]() -ը
և
-ը
և ![]() -ը
ինչպես
նաև 22’ կետերի միջև
եղած մագնիսական
պոտենցիալների
տարբերությունը`
-ը
ինչպես
նաև 22’ կետերի միջև
եղած մագնիսական
պոտենցիալների
տարբերությունը`
![]()
կամ
![]()
Ապա որոշում ենք
![]()
ինչպես
նաև ![]() -ն,
-ն,
![]() -ն
և
-ն
և
![]()
Նույն եղանակով որոշում ենք
![]()
![]() և վերջապես
և վերջապես
![]()
կամ

Այսպիսով, տվյալ մագնիսական շղթայում գործող մագնիսաշարժ ուժը հավասար է առանձին դիմադրություններում մագնիսական անկումների գումարին:
Հակառակ
խնդիրը (տրված
F -ի դեպքում որոշել
![]() –ն)
լուծվում է հաջորդական
մոտեցման եղանակով:
Այսինքն` օդային
բացակի հոսքին
տալիս ենք մի քանի
արժեքներ (
–ն)
լուծվում է հաջորդական
մոտեցման եղանակով:
Այսինքն` օդային
բացակի հոսքին
տալիս ենք մի քանի
արժեքներ (![]() )
և ուղիղ եղանակով
որոշում դրանց
համապատասխան
մագնիսաշարժ ուժերը
(
)
և ուղիղ եղանակով
որոշում դրանց
համապատասխան
մագնիսաշարժ ուժերը
(![]() ),
որից հետո կառուցում
ենք կոր`
),
որից հետո կառուցում
ենք կոր` ![]() ( նկ.5.10 ) և այդ կորից
( նկ.5.10 ) և այդ կորից
![]() -ի
համար որոշում
-ի
համար որոշում
![]() -ն:
Օդային բացակի
հոսքի առաջին
մոտավոր արժեքը
կարելի է որոշել
հետևյալ բանաձևով.
-ն:
Օդային բացակի
հոսքի առաջին
մոտավոր արժեքը
կարելի է որոշել
հետևյալ բանաձևով.
![]() ,
,
որտեղ
![]() -ը
տրված մագնիսաշարժ
ուժն է, իսկ
-ը
տրված մագնիսաշարժ
ուժն է, իսկ ![]() -ը`
օդային բացակի
ընդհանուր մագնիսական
հաղորդակա-նությունը
(նկ.5.11):
-ը`
օդային բացակի
ընդհանուր մագնիսական
հաղորդակա-նությունը
(նկ.5.11):
|
Նկ. 5.10. |
|
Նկ. 5.11 Աշխատանքային հոսքի բաշխվածությունը |
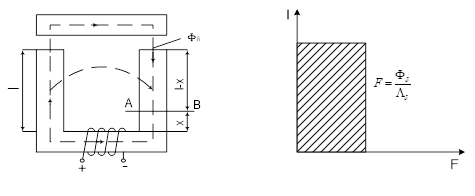
5.4. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ԷՆԵՐԳԵՏԻԿ ՀԱՇՎԵԿՇՌԻ ՀԱՎԱՍԱՐՈՒՄԸ ԵՎ
ՁԳՈՂ ՈՒԺԻ ՈՐՈՇՈՒՄԸ
Վերցնենք մի փականաձև էլեկտրամագնիս:
Այն միացնենք հաստատուն հոսանքի ցանցին: Խարիսխը անշարժ է: Կոճը ցանցին միացնելու պահին (անցողիկ պրոցեսի ժամանակ) տեղի ունի հետևյալ հավասարումը
![]() : (5.5)
: (5.5)
Հավասարման
աջ և ձախ մասերը
բազմապատկենք
![]() –ով կստանանք
–ով կստանանք
![]() , (5.6)
, (5.6)
որտեղ ![]() -ն ցանցից
վերցրած լրիվ էներգիան
է,
-ն ցանցից
վերցրած լրիվ էներգիան
է,
![]() – ն էներգիայի
այն մասն է, որը
ծախսվում է կոճի
– ն էներգիայի
այն մասն է, որը
ծախսվում է կոճի
տաքացման համար, ջերմային կորուստ,
![]() -ն ցանցից վերցրած
էլեկտրաէներգիայի
այն մասն է, որը
-ն ցանցից վերցրած
էլեկտրաէներգիայի
այն մասն է, որը
վեր է ածվում մագնիսական էներգիայի,
![]() -ն բերենք հավասարման
ձախ մաս և ինտեգրենք
0-ից
-ն բերենք հավասարման
ձախ մաս և ինտեգրենք
0-ից ![]()
![]() : (5.7)
: (5.7)
Այս հավասարումտ
կոչվում է էլեկտրամագնիսի
էներգետիկ հաշվեկշռի
հավասարում: Այն
ցույց է տալիս,
որ ցանցից վերցրած
լրիվ էներգիան`
առանց ջերմային
կորուստների վերածվում
է մագնիսական էներգիայի:
Երբ հոսանքը կոճում
հասնի իր հաստատված
արժեքին` ![]() , ապա իր հաստատված
արժեքին կհասնի
նաև հոսքակցումը:
Մագնիսական էներգիայի
կուտակումը էլեկտրամագնիսում
այդ ժամանակ կդադարի:
Մագնիսական էներգիայի
պաշարը էլեկտրամագնիսում
նշանակենք A
, ապա իր հաստատված
արժեքին կհասնի
նաև հոսքակցումը:
Մագնիսական էներգիայի
կուտակումը էլեկտրամագնիսում
այդ ժամանակ կդադարի:
Մագնիսական էներգիայի
պաշարը էլեկտրամագնիսում
նշանակենք A
![]() : (5.8)
: (5.8)
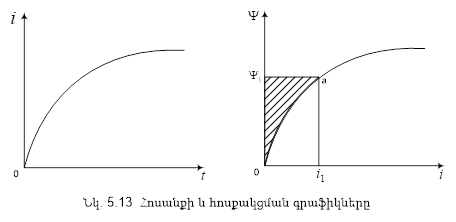
Հոսանքի որևէ
![]() արժեքի համար,
եթե ուզում ենք
որոշել մագնիսական
էներգիայի պաշարն
էլեկտրամագնիսում,
գրում ենք (նկ.5.13)
արժեքի համար,
եթե ուզում ենք
որոշել մագնիսական
էներգիայի պաշարն
էլեկտրամագնիսում,
գրում ենք (նկ.5.13)
![]()
Որպիսի որոշենք
էլեկտրամագնիսի
ձգող ուժը, հարկավոր
է ունենալ երկու
հարևան բացակների
համար ![]() կախվածութունները:
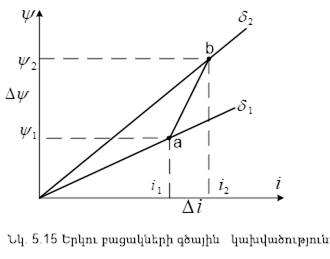
Կառուցենք
կախվածութունները:
Կառուցենք ![]() և
և ![]() բացակների համար
բացակների համար
![]() կախվածութունները,
ընդ որում
կախվածութունները,
ընդ որում ![]() – ից
– ից
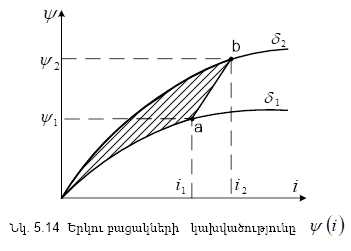
![]() -ով նշանակենք
մագնիսական էներգիան
էլեկտրամագնի-սում,
որը կուտակվել
է կոճի ցանցին
միացնելու պահից
մինչև խարիսխի
շարժվելը,
-ով նշանակենք
մագնիսական էներգիան
էլեկտրամագնի-սում,
որը կուտակվել
է կոճի ցանցին
միացնելու պահից
մինչև խարիսխի
շարժվելը,
![]() :
:
![]() - ով նշանակենք
մագնիսական էներգիան
- ով նշանակենք
մագնիսական էներգիան
Էլեկտրամագնիսում խարսխի շարժման վերջում
![]() :
:
![]() - ով նշանակենք
այն մագնիսական
էներգիան, որը
- ով նշանակենք
այն մագնիսական
էներգիան, որը
ստացվում է ցանցից` խարսխի շարժման ընթացքում
![]() :
:
Խարիսխը
շարժման ժամանակ
կատարում է մեխանիկական
աշխատանք, այն
նշանակենք Δ![]() : Էներգիայի
պահպանման օրենքից
: Էներգիայի
պահպանման օրենքից
![]() :
:
Այսինքն մինչև խարիսխը շարժվելը մագնիսական էներգիայի և շարժման ընթացքում ստացված մագնիսական էներգիայի գումարը հավասար է շարժման վերջում մագնիսական էներգիայի և խարսխի կատարած մեխանիկական աշխատանքի գումարին:
Այստեղից
![]() :
:
Միջին
ձգող ուժը ![]() -ից
-ից ![]() տեղամասում
տեղամասում
![]() :
:
Այսպիսով ստացվում
է, որ ձգող ուժը
գտնելու համար
պետք է կառուցել
![]() բնութագրերը
2 բացակների համար
և դրանցով պարփակված
մակերեսով որոշել
մեխանիկական աշխատանքը,
այնուհետև` ձգող
ուժը:
բնութագրերը
2 բացակների համար
և դրանցով պարփակված
մակերեսով որոշել
մեխանիկական աշխատանքը,
այնուհետև` ձգող
ուժը:
![]() հաստատուն ՄՇՈՒ-ի
դեպքում անվանում
են էլեկտրամագնիսի
ստատիկ բնութագիր:
Նշանակում են
հաստատուն ՄՇՈՒ-ի
դեպքում անվանում
են էլեկտրամագնիսի
ստատիկ բնութագիր:
Նշանակում են ![]() : Ձգող ուժի հաշվարկները
հեշտացվում են,
երբ ընդունվում
է, որ մագնիսական
շղթան հագեցած
չէ, այսինքն` անտեսվում
են պողպատի մագնիսական
դիմադրությունները:
Այդ դեպքում փաստորեն
: Ձգող ուժի հաշվարկները
հեշտացվում են,
երբ ընդունվում
է, որ մագնիսական
շղթան հագեցած
չէ, այսինքն` անտեսվում
են պողպատի մագնիսական
դիմադրությունները:
Այդ դեպքում փաստորեն
![]() բնութագրերը
դառնում են ուղիղ
գծեր: Հետևաբար
մակերեսները դառնում
են եռանկյուն,
սեղան այլ պարզ
երկրաչափական
մարմինների մակերեսներ:
բնութագրերը
դառնում են ուղիղ
գծեր: Հետևաբար
մակերեսները դառնում
են եռանկյուն,
սեղան այլ պարզ
երկրաչափական
մարմինների մակերեսներ:
Այդպիսի դեպքի համար որոշենք ձգող ուժը
![]() , (5.9)
, (5.9)
![]() ,
,
![]() ,
,
![]() :
:
Տեղադրենք (5.9) -ում
![]() ,
,
![]() ,
,
![]() :
:
Ձգող ուժը `
![]() (5.10)
(5.10)
Եթե
ընդունենք, որ
![]() (այսինքն` հոսանքը
կոճում կախված
օդային բացակից
չի փոփոխվում),
կստանանք
(այսինքն` հոսանքը
կոճում կախված
օդային բացակից
չի փոփոխվում),
կստանանք
![]() ,
,
![]() ,
,
![]() :
:
Եթե
ընդունենք, որ
![]() , ապա
, ապա
![]() : (5.11)
: (5.11)
Հաշվի առնելով նաև այն, որ
![]() ,
,
ապա
![]() ,
,
![]() : (5.12)
: (5.12)
Ձգող ուժի այս
բանաձևը հարմար
է, քանի որ եթե հայտնի
է լինում ![]() –ն, ապա կարելի
է այն ածանցելով
գտնել
–ն, ապա կարելի
է այն ածանցելով
գտնել ![]() -ն , և գտնել
-ն , և գտնել ![]() -ն: Պետք է նշել,
որ ածանցելիս
բանաձևում առաջանում
է (-) նշան, որը ցույց
է տալիս, որ ուժն
ուղղված է բացակի
փոքրացման ուղղությամբ:
-ն: Պետք է նշել,
որ ածանցելիս
բանաձևում առաջանում
է (-) նշան, որը ցույց
է տալիս, որ ուժն
ուղղված է բացակի
փոքրացման ուղղությամբ:
Ստատիկ բնութագիրը կունենա (նկ.5.16) տեսք:
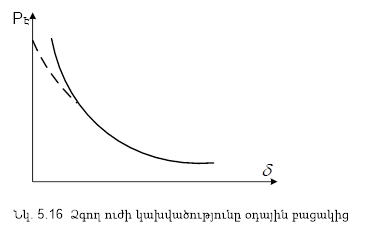
Ըստ ձգող ուժի
բանաձևի, երբ ![]() , բայց իրականում
ձգող ուժը անսահման
լինել չի կարող,
այն ունի որոշակի
արժեք (շտրիխով
ցույց տված կորը):
Ըստ բանաձևի ստացվում
է անսահմանություն,
որովհետև բանաձևը
ստացվել է` ընդունելով,
որ պողպատի մագնիսական
դիմադրությունը
զրո է , իսկ իրականում
այն գոյություն
ունի: Հաճախ ձգող
ուժը որոշում են
այլ բանաձևով,
որը կոչվում է
Մաքսվելի բանաձև
, բայց իրականում
ձգող ուժը անսահման
լինել չի կարող,
այն ունի որոշակի
արժեք (շտրիխով
ցույց տված կորը):
Ըստ բանաձևի ստացվում
է անսահմանություն,
որովհետև բանաձևը
ստացվել է` ընդունելով,
որ պողպատի մագնիսական
դիմադրությունը
զրո է , իսկ իրականում
այն գոյություն
ունի: Հաճախ ձգող
ուժը որոշում են
այլ բանաձևով,
որը կոչվում է
Մաքսվելի բանաձև
![]() (5.13)
(5.13)
կամ
![]() : (5.14)
: (5.14)
Մաքսվելի բանաձևից օգտվում են այն դեպքում, երբ ենթադրվում է, որ ինդուկցիայի բաշխվածությունը դիտարկվող մակերևույթի վրա հավասարաչափ է:
5.5. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱՄԱԳՆԻՍՆԵՐԻ
ՁԳՈՂ ՈՒԺԻ ՈՐՈՇՈՒՄ
Փոփոխական հոսանքի էլեկտրամագնիսները հիմնականում աշխատում են երկու համակարգերում` միաֆազ և եռաֆազ: Դիտարկենք էլեկտրամագնիսի ձգող ուժը յուրաքանչյուր համակարգում առանձին- առանձին
Միաֆազ համակարգ:
Ձգող ուժը որոշենք Մաքսվելի բանաձևով
![]()
Քանի որ ունենք փոփոխական համակարգ է, ապա ընդունենք, որ ինդուկցիան նույնպես փոփոխվում է sin-ի օրենքով
![]()
Ձգող ուժը կլինի
![]()
Հայտնի է, որ
![]() ,
,
ուրեմն`
![]() :
:
Ստացվում է, որ ձգող ուժը կախված է երկու բաղադրիչներից
1-ին հաստատուն բաղադրիչ,
2-րդ փոփոխական բաղադրիչ, որը փոփոխվում է կրկնակի հաճախականությամբ, որն էլ դառնում է խարսխի տատանումների պատճառ:
![]() : (5.15)
: (5.15)
Ձգող ուժի գրաֆիկական պատկերը բերված է (նկ. 5.17)
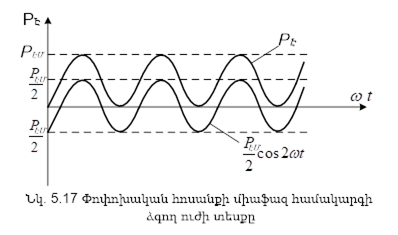
Ինչպես երևում
է գրաֆիկից, ձգող
ուժը փոխվում է
0-ից մինչև առավելագույն
արժեքը: Այդպիսի
փոփոխումը անթույլատրելի
է, քանի որ ժամանակի
որոշ պահից, երբ
![]() –ն դառնում է
մեծ հակազդող ուժերից,խարիսխը
ձգվում է, իսկ երբ
տեղի է ունենում
հակառակը, հետ
է վերադառնում:
Այսինքն առաջանում
է խարիսխի տատանումներ:
Այդ տատանումների
հետևանքով առաջանում
է աղմուկ և կոնտակտների
ոչ նորմալ աշխատանքային
ռեժիմ: Տատանումները
վերացնելու համար
կան տարբեր մեթոդներ:
Ամենատարածվածը
կարճ միացված
գալարի մեթոդն
է: Մեթոդի էությունը
հետևյալն է. էլեկտրամագնիսի
միջուկը ճեղքում
են և նրա ճեղքված
մասի վրա տեղադրում
են կարճ միացված
գալար (նկ.5.18)
–ն դառնում է
մեծ հակազդող ուժերից,խարիսխը
ձգվում է, իսկ երբ
տեղի է ունենում
հակառակը, հետ
է վերադառնում:
Այսինքն առաջանում
է խարիսխի տատանումներ:
Այդ տատանումների
հետևանքով առաջանում
է աղմուկ և կոնտակտների
ոչ նորմալ աշխատանքային
ռեժիմ: Տատանումները
վերացնելու համար
կան տարբեր մեթոդներ:
Ամենատարածվածը
կարճ միացված
գալարի մեթոդն
է: Մեթոդի էությունը
հետևյալն է. էլեկտրամագնիսի
միջուկը ճեղքում
են և նրա ճեղքված
մասի վրա տեղադրում
են կարճ միացված
գալար (նկ.5.18)
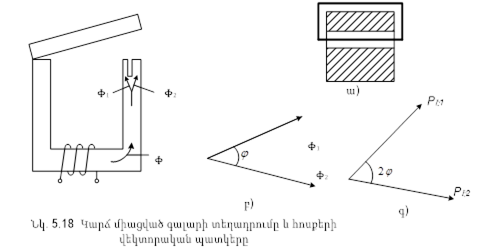
Ճեղքի հետևանքով
Φ հոսքը բաժանվում
է երկու հոսքերի
![]() :
:
![]() - ը անցնում է
կարճ միացված
գալարով ընգրկված
մասով, իսկ
- ը անցնում է
կարճ միացված
գալարով ընգրկված
մասով, իսկ ![]() -ը` միջուկի այն
մասով, որն ընգրկված
չէ գալարով:
-ը` միջուկի այն
մասով, որն ընգրկված
չէ գալարով:
![]() հոսքը
կարճ միացված
գալարում ինդուկցում
է էլշու: Այդ էլշու-ն
գալարում ստեղծում
է հոսանք, որն իր
հերթին ստեղծում
է
հոսքը
կարճ միացված
գալարում ինդուկցում
է էլշու: Այդ էլշու-ն
գալարում ստեղծում
է հոսանք, որն իր
հերթին ստեղծում
է ![]() ` մագնիսական
էկրանի հոսք:
` մագնիսական
էկրանի հոսք: ![]() հոսքը հակառակ
է ուղղված
հոսքը հակառակ
է ուղղված ![]() հոսքին և արդյունքում
հոսքին և արդյունքում
![]() հոսքը գումարվում
է
հոսքը գումարվում
է ![]() հոսքին, իսկ
հոսքին, իսկ
![]() -ից` հանվում:
Էկրանի հոսքը ֆազայով
շեղված է
-ից` հանվում:
Էկրանի հոսքը ֆազայով
շեղված է ![]() և
և ![]() հոսքերից, դա
բերում է նրան,
որ
հոսքերից, դա
բերում է նրան,
որ ![]() -ի և
-ի և ![]() -ի միջև առաջանում
է ֆազային շեղում:
-ի միջև առաջանում
է ֆազային շեղում:
![]() հոսքերը ստեղծում
են համապատասխանաբար
իրենց ձգող ուժերը,
որոնք նույնպես
շեղված են իրարից
կրկնակի անկյունով:
Եթե
հոսքերը ստեղծում
են համապատասխանաբար
իրենց ձգող ուժերը,
որոնք նույնպես
շեղված են իրարից
կրկնակի անկյունով:
Եթե ![]() կա
կա ![]() , իսկ եթե
, իսկ եթե ![]() կա
կա ![]() : Այսինքն միշտ
կա գումարային
ուժ, որը հավասար
չէ զրոյի (նկ.5.19):
: Այսինքն միշտ
կա գումարային
ուժ, որը հավասար
չէ զրոյի (նկ.5.19):
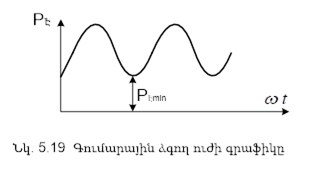
![]() :
:
Եթե գումարային
ուժի նվազագույն
արժեքը ![]() մեծ է հակազդող
ուժից, ապա խարսխի
տատանումը կվերանա:
մեծ է հակազդող
ուժից, ապա խարսխի
տատանումը կվերանա:
Եռաֆազ համակարգ:
Դիտարկենք ձգող ուժի առաջացման գործընթացը:
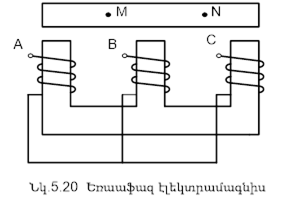
Փաթույթները
սնող հոսանքները
շեղված են միմյանցից
![]() -ով: Էլեկտրամագնիսում
գործող մագնիսական
հոսանքները նույնպես
շեղված են
-ով: Էլեկտրամագնիսում
գործող մագնիսական
հոսանքները նույնպես
շեղված են ![]() -ով: Այդ շեղումը
վերացնում է խարսխի
տատանումները:
-ով: Այդ շեղումը
վերացնում է խարսխի
տատանումները:
Ձգող ուժերը կգրվեն
![]() ,
,
![]()
![]() :
:
Գումարային ձգող ուժը
![]() :
:
Ստացվում է, որ ձգող ուժը ժամանակի ընթացքում չի փոխվում: Փոփոխվում է միայն ուժի կիրառման կետը` (M,N) :
5.6. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ
ՀԱՇՎԱՐԿԻ ԱՌԱՆՁՆԱՀԱՏԿՈՒԹՅՈՒՆՆԵՐԸ
Փոփոխական
հոսանքի էլեկտրամագնիսի
հաշվարկի կատարման
հաջորդականությունը
նույնն է, ինչ որ
հաստատուն հոսանքի
էլեկտրամագնիսինը:
Սկսում են նույն
նախնական հաշվարկից,
որով որոշվում
են մագնիսալարի
չափերը: Տարբերությունը
միայն այն է, որ
օդային բացակի
ինդուկցիայի մեծությունը
վերցնում են իր
հագեցման արժեքով
( ![]() ),
այսինքն`
),
այսինքն` ![]() տեսքով: Միևնույն
արժեքի դեպքում
նույն էլեկտամագնիսը
հաստատուն հոսանքի
պայմաններում
երկու անգամ ավելի
մեծ ուժ կստեղծի,
քան փոփոխականի
պայմաններում:
տեսքով: Միևնույն
արժեքի դեպքում
նույն էլեկտամագնիսը
հաստատուն հոսանքի
պայմաններում
երկու անգամ ավելի
մեծ ուժ կստեղծի,
քան փոփոխականի
պայմաններում:
Փոփոխական
հոսանքի էլեկտրամագնիսների
![]() օպտիմալ
հարաբերությունն
ավելի փոքր է, քան
հաստատուն հոսանքի
էլեկտրամագնիսներինը,
որի շնորհիվ կոճերը
ստացվում են կարճ
և հարմար: Դա բացատրվում
է նրանով, որ փոփոխական
հոսանքի էլեկտրամագնիսներում
առաջանում են հզորության
կորուստներ` մրրկային
հոսանքի և մագնիսալարի
հիստերեզիսի վրա,
որոնք համեմատական
են մագնիսալարի
ծավալին: Այդ կորուստները
նվազեցնելու համար
պետք է փոքրացնել
միջուկի երկարությունը,
այսինքն`
օպտիմալ
հարաբերությունն
ավելի փոքր է, քան
հաստատուն հոսանքի
էլեկտրամագնիսներինը,
որի շնորհիվ կոճերը
ստացվում են կարճ
և հարմար: Դա բացատրվում
է նրանով, որ փոփոխական
հոսանքի էլեկտրամագնիսներում
առաջանում են հզորության
կորուստներ` մրրկային
հոսանքի և մագնիսալարի
հիստերեզիսի վրա,
որոնք համեմատական
են մագնիսալարի
ծավալին: Այդ կորուստները
նվազեցնելու համար
պետք է փոքրացնել
միջուկի երկարությունը,
այսինքն` ![]() -ը:
Այդպիսի նվազեցման
սահմանը չափվում
է փաթույթում պղնձի
կորստով: Եվ, իրոք,
փաթույթի երկայնական
կարճացման ժամանակ
այն համաչափ լայնական
մեծանում է, որն
առաջ է բերում
փաթույթի ակտիվ
դիմադրության
մեծացման` գալարի
միջին երկարության
մեծացման հետևանքով:
-ը:
Այդպիսի նվազեցման
սահմանը չափվում
է փաթույթում պղնձի
կորստով: Եվ, իրոք,
փաթույթի երկայնական
կարճացման ժամանակ
այն համաչափ լայնական
մեծանում է, որն
առաջ է բերում
փաթույթի ակտիվ
դիմադրության
մեծացման` գալարի
միջին երկարության
մեծացման հետևանքով:
![]() օպտիմալ
հարաբերությունը,
որը համապատասխանում
է հզորությունների
գումարային կորուստների
նվազագույնին:
օպտիմալ
հարաբերությունը,
որը համապատասխանում
է հզորությունների
գումարային կորուստների
նվազագույնին:
Էլեկտրամագնիսի
վերջնական հաշվարկը
կատարվում է` նկատի
ունենալով հոսքի
և մագնիսաշարժ
ուժի կորուստը:
Սակայն փոփոխական
հոսանքի էլեկտրամագնիսի
դեպքում անհրաժեշտություն
է զգացվում որոշել
հզորության հիստերեզիսի
(![]() )
և մրրկային կորուստները
մագնիսալարում
ու էկրանում (
)
և մրրկային կորուստները
մագնիսալարում
ու էկրանում (![]() ),
),
![]()
![]() -ի
մեծությունը որոշվում
է էկրանի հոսանքով
և վերջինիս դիմադրությամբ,
իսկ
-ի
մեծությունը որոշվում
է էկրանի հոսանքով
և վերջինիս դիմադրությամբ,
իսկ ![]() -ն
և
-ն
և ![]() -ն`
հետևյալ բանաձևերով.
-ն`
հետևյալ բանաձևերով.
![]() ,
,
![]()
որտեղ
![]() -ը`
ինդուկցիան է (S),
-ը`
ինդուկցիան է (S),
![]() –
ը` հաճախականությունը
( Հց)
–
ը` հաճախականությունը
( Հց)
![]() -ը`
մագնիսալարի պողպատի
ծավալը ( մ3 ),
-ը`
մագնիսալարի պողպատի
ծավալը ( մ3 ),
![]() -ն ` մագնիսալարի
նյութի տեսակարար
խտությունը (կգ/մ3),
իսկ
-ն ` մագնիսալարի
նյութի տեսակարար
խտությունը (կգ/մ3),
իսկ
![]() -ն
և
-ն
և ![]() -ն` էլեկտրական
գործակիցները`
կախված նյութից
և նրա մեծությունից:
-ն` էլեկտրական
գործակիցները`
կախված նյութից
և նրա մեծությունից:
Քանի
որ ![]() -ն
և
-ն
և ![]() -ն
կախված են
-ն
կախված են ![]() ինդուկցիայից,
մագնիսալարը յուրաքանչյուր
մասում տարբեր
է: Հիստերեզիսի
և մրրկային հոսանքների
կորուստները պետք
է որոշել այնպես,
ինչպես հաշվում
են մագնիսալարի
մագնիսացնող ուժերի
կորուստը` հաջորդական
գումարումներով:
ինդուկցիայից,
մագնիսալարը յուրաքանչյուր
մասում տարբեր
է: Հիստերեզիսի
և մրրկային հոսանքների
կորուստները պետք
է որոշել այնպես,
ինչպես հաշվում
են մագնիսալարի
մագնիսացնող ուժերի
կորուստը` հաջորդական
գումարումներով:
Փոփոխական հոսանքի էլեկտրամագնիսի մագնիսալա-րում ակտիվ հզորության կորստի հետևանքով փաթույթի հաշվարկն ավելի է բարդանում, քան հաստատուն հոսանքինը:
Էլեկտրամագնիսի փաթույթի գալարների թիվը որոշվում է հետևյալ բանաձևով.
![]()
որտեղից
![]() :
:
Իսկ հաղորդալարի տրամագիծը, հաշվի առնելով տաքացումը, որոշվում է լրիվ հոսանքով.
![]() ,
,
որտեղ
![]() -ը
հոսանքի կորուստն
է, իսկ
-ը
հոսանքի կորուստն
է, իսկ
![]() -ն`
մագնիսացնող հոսանքը:
-ն`
մագնիսացնող հոսանքը:
Նկ. 5.12-ում բերված է փոփոխական հոսանքի էլեկտրամագնիսի փոխարինման սխեման:
R-ը կոճի ակտիվ դիմադրությունն է,
Xկ.տ.-ն ` կոճի ինդուկտիվ դիմադրությունը` պայմանա-վորված աշխատանքային հոսքով,
Xd-ը` կոճի ինդուկտիվ դիմադրությունը` պայմանավոր-ված ցրման հոսքով, իսկ
Rկոր-ը` ակտիվ դիմադրությունը, պայմանավորված մագնիսալարում առաջացած կորուստներով:
Եթե հաշվի չառնենք լարման անկումը կոճի ակտիվ R դիմադրության և ցրման հոսքի դիմադրության վրա, ապա, համաձայն նկ.5.12-ի, հոսանքի կորուստը`
![]() :
:
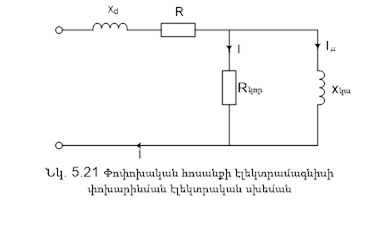
Մագնիսացնող
հոսանքը` ![]() -ը,
որը մագնիսալարում
ստեղծում է մագնիսական
հոսք, հաշվարկվում
է մագնիսացնող
ուժի միջոցով:
-ը,
որը մագնիսալարում
ստեղծում է մագնիսական
հոսք, հաշվարկվում
է մագնիսացնող
ուժի միջոցով:
![]() ,
,
որտեղ F-ը որոշվում է մագնիսական շղթայի հաշվարկից:
Եթե մագնիսաշարժ ուժի կորուստը նկատի չառնենք, ապա
![]() :
:
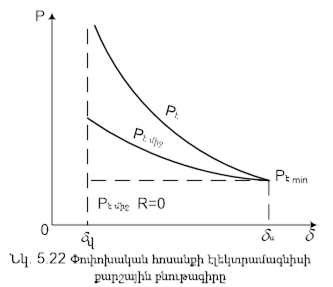
Կարճ միացված գալարով էլեկտրամագնիսի նախնական հաշվարկը կարելի է կատարել առանց էկրանը (կարճ միացված գալարը/) հաշվի առնելու (Pէ.միջ-ի միջոցով), իսկ վերջնական հաշվարկի ժամանակ պետք է հաշվի առնել, որպեսզի Pէ.min-ը գերազանցի հակազդող ուժին` Pհակ-ին:
Կարճ միացված գալարով էլեկտրամագնիսի հաշվարկի առանձնահատկությունն այն է, որ անհրաժեշտ է հաշվարկել այդ գալարը և ընտրել Sմկ1/Sմկ2 փոխադարձ կապը: Որոշիչն այստեղ Pէ.min ամենամեծ արժեքի ստացումն է, քանի որ այն համեմատվում է Pհակ-ի հետ, և, հետևաբար` որոշում կոճի մագնիսաշարժ ուժը:
Ինչպես տեսանք , Sմկ2 հատույթի մակերեսը` ընդգրկված կարճ միացված գալարով, վերցվում է ավելի մեծ, քան Sմկ1 –ը:
Փոփոխական հոսանքի էլեկտրամագնիսի ժամանակի պարամետրը` տեղաշարժման ժամանակը հաշվելիս անտեսում ենք:
ՎԵՑԵՐՈՐԴ ԳԼՈՒԽ
6.1. ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ԴԻՆԱՄԻԿ ԲՆՈՒԹԱԳՐԵՐԸ
ԵՎ ՄԻԱՑՄԱՆ ՈՒ ԱՆՋԱՏՄԱՆ ԺԱՄԱՆԱԿԻ ՈՐՈՇՈՒՄԸ
Այն բոլոր բնութագրերը , որոնք ստանում ենք խարսխի շարժման ընթացքում, հաշվի առնելով միաժամանակ կոճում հոսանքի փոփոխությունները, կոչվում են դինամիկ բնութագրեր: Դրանք դիտարկվում են էլեկտրամագնիսում անցողիկ պրոցեսներն ուսումնասիրելու ժամանակ:
Այդ բնութագրերից հիմնականներն են`
![]()
որտեղ ![]() - ն ժամանակն
է, իսկ
- ն ժամանակն
է, իսկ ![]() -ն
` հոսանքը:
-ն
` հոսանքը:
Այս բնութագրերը կարելի է կառուցել , եթե նախօրոք մեզ հայտնի են.
![]() :
:
Դինամիկ բնութագրերն ուսումնասիրելիս օգտվում ենք հետևյալ հավասարումից.
![]() : (6.1)
: (6.1)
Բայց
քանի որ ![]() ,
,
ապա խարսխի անշարժ վիճակում
![]() ,
(6.2)
,
(6.2)
իսկ շարժման ժամանակ
![]() :
(6.3)
:
(6.3)
(6.2) բանաձևն
օգտագործվում
է, երբ պետք է կառուցել
![]() բնութագիրը
անշարժ խարսխի
դեպքում (միացման
պահից մինչև բանեցման
հոսանքի մեծությունը):
բնութագիրը
անշարժ խարսխի
դեպքում (միացման
պահից մինչև բանեցման
հոսանքի մեծությունը):
(6.3) հավասարումը բնութագրում է խարսխի շարժումը:
Pէ dx-ը խարսխի կատարած աշխատանքն է dx երկարությամբ տեղափոխվելիս, m-ը` խարսխի զանգվածը, Pմ dx –ը` հակազդող ուժերի աշխատանքը, որը վերցվում է մեխանիկական բնութագրից:
Դիտարկենք, թե ինչ օրենքով է փոփոխվում հոսանքը` կախված ժամանակից:
Առաջին դեպք: Անշարժ խարսխի տակ տեղավորենք փայտի մի կտոր, որպեսզի խարիսխը չշարժվի (նկ.6.1):
Քանի որ խարիսխն անշարժ է, ապա լարման հավասարումը կլինի
![]()
Հավասարման աջ մասի երրորդ անդամը հավասար կլինի զրո, ուստի հավասարումը կլինի`
![]()
կամ
![]()
որտեղ
![]() ը ժամանակի հաստատունն
է:
ը ժամանակի հաստատունն
է:
![]() -ն
էքսպոնենցիալ
կոր է ( նկ.6.2):
-ն
էքսպոնենցիալ
կոր է ( նկ.6.2):
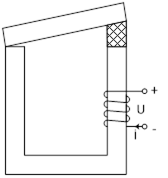
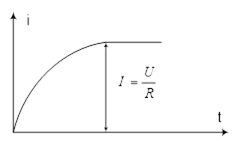
Նկ. 6.1 Խարսխի
անշարժացումը
Նկ. 6.2 ![]() -
բնութագիրը
-
բնութագիրը
Երկրորդ դեպք: Հանենք արգելքը և տեսնենք նույն կախումը, երբ խարիսխը շարժվում է (նկ.6.3):
a կետից խարիսխը սկսում է շարժվել, օդային բացակը սկսում է փոքրանալ: Այդ պահից հոսանքի փոփոխություն է տեղի ունենում, և էլեկտրամագնիսի փաթույթում խնդուկտվում է հակառակ ԷՇՈՒ, այդ պատճառով էլ կոճի հոսանքը սկսում է փոքրանալ ab կորագծով`մինչև խարսխի փակվելը:
Խարսխի կանգ առնելուց հետո հոսանքը նորից սկսում է աճել և հասնում է իր հաստատված մեծությանը: Այսպիսով, միացման պահից մինչև հաստատված ռեժիմը հոսանքը փոփոխվում է 0abc կորով, ընդ որում, 0ab հատվածը կոչվում է բանեցման ժամանակ tբան, որը բաղկացած է հետևյալ երկու բաղադրիչներից` ա) տեղաշարժման ժամանակից tտեղ և բ) շարժման ժամանակից tշար:
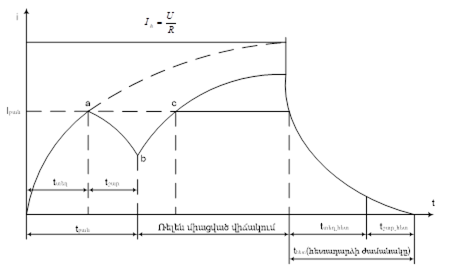
|
Նկ. 6.3 Էլեկտրամագնիսի դինամիկ բնութագիրը |
tտեղ-ը այն ժամանակն է, որը տևում է կոճի միացման պահից մինչև խարսխի շարժվելը,
tշար-ն այն ժամանակն է, երբ խարիսխը շարժվում է
![]() ,
,
![]()
6.2. ԱՐԱԳԱԳՈՐԾ ԷԼԵԿՏՐԱՄԱԳՆԻՍՆԵՐ
Արագագործ են համարվում այն էլեկտրամագնիսները, որոնք ունեն 0.05 վ-ից փոքր բանեցման ժամանակ:
Այդպիսի` բանեցման ոչ մեծ ժամանակ ունեցող էլեկտրամագնիսների պատրաստումն ապահովվում է, եթե պահպանվեն մի շարք նախապայմաններ: Հիմնական նախապայմանները դժվար չէ ցույց տալ բանեցման ժամանակի վերլուծական արտահայտությամբ`

1. Պաշարի
գործակիցը` ![]() ,
պետք է հնարավորին
չափ մեծ լինի:
,
պետք է հնարավորին
չափ մեծ լինի:
Դրան կարելի է հասնել մի քանի եղանակով: Նախ` էլեկտրամագնիսի կոճում հոսանքի մեծացմամբ: Այդ դեպքում կոճը հաջորդաբար միանում է լրացուցիչ ակտիվ դիմադրության, որը խարսխի շարժման ժամանակ շունտավորված է: Էլեկտրամագնիսի բանեցումից հետո լրացուցիչ դիմադրությունը նորից միացվում է կոճի շղթային և սահմանափակում է հոսանքի մեծացումը կոճում:
Պաշարի գործակցի մեծացման մի այլ միջոց է բանեցման հոսանքի փոքրացումը: Դրան կարելի է հասնել նախնական մեխանիկական հակազդող ուժը փոքրացնելով:
2. Մագնիսական համակարգի ինդուկտիվությունը սկզբնական բացակի դեպքում պետք է լինի առավելագույն:
3. Կոճի շղթայի ակտիվ դիմադրությունը դժվար չէ փոփոխել`հաջորդաբար միացնելով լրացուցիչ ակտիվ դիմադրություն, որը պետք է յուրաքանչյուր էլեկտրամագնիսի համար ունենա առավելագույն արժեք: Իսկապես, R-ի մեծացումով փոքրանում է մագնիսական համակարգի ժամանակի հաստատունը, որն էլ մեծացնում է էլեկտրամագնիսի արագագործությունը: Միաժամանակ R-ի մեծացումը հանգեցնում է Iբան-ի հոսանքի փոքրացմանը, որը, ինչպես նշվեց վերը, իջեցնում է արագագործությունը: Ավելին, եթե Iբան-ն ինչ-որ արժեքի դեպքում Iհետ-ից փոքր է լինում, ապա էլեկտրամագնիսն ընդհանրապես չի աշխատում:
4. Մրրկային հոսանքների ազդեցությունը թուլացնելու համար անհրաժեշտ է էլեկտրամագնիսի մագնիսալարը պատրաստել շերտավոր, ինչպես փոփոխական հոսանքի էլեկտրամագնիսներինն է:
5. Մագնիսալարի պողպատի մեջ ինդուկցիան, որի դեպքում տեղի է ունենում էլեկտրամագնիսի բանեցումը, պետք է լինի 0.2-0.3*10-4Վբ/սմ2-ից ոչ մեծ:
6. Արագագործ
էլեկտրամագնիսի
մագնիսալարը պատրաստելու
համար անհրաժեշտ
է օգտագործել այնպիսի
նյութեր, որոնք
դաշտի H լարվածության
փոքր արժեքների
դեպքում ունենան
![]() -ի մեծ արժեքներ
(օրինակ` պերմալոյ
):
-ի մեծ արժեքներ
(օրինակ` պերմալոյ
):
7. Էլեկտրամագնիսի խարիսխը, ինչպես նաև մեխանիզմի բոլոր շարժվող մասերը պետք է ունենան հնարավորին փոքր կշիռ:
8. Սկզբնական
օդային բացակի
մեծությունը պետք
է լինի նվազագույնը
(երբեմն ![]() -ն
վերցնում են
0.2-0.3 մմ):
-ն
վերցնում են
0.2-0.3 մմ):
Այն դեպքում, երբ վերոհիշյալ միջոցները չեն նպաստում անհրաժեշտ արագագործ էլեկտրամագնիսներ ստանալուն, կիրառում են հատուկ սխեմաներ, որոնք արագացնում են էլեկտրամագնիսի բանեցումը (նկ.6.4, ա, բ, գ):
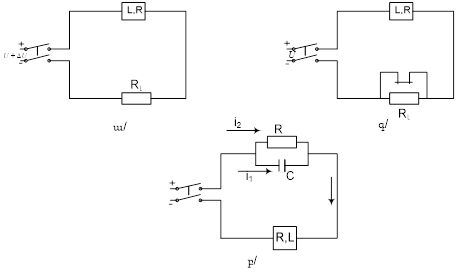
|
Նկ.6.4 Էլեկտրամագնիսների արագագործությունը մեծացնելու սխեմաներ |
Նկ.6.4ա
սխեմայով կարող
ենք տեղաշարժման
ժամանակը փոքրացնել,
եթե ![]() լարման բարձրացման
հետ շղթայի մեջ
մտցնենք
լարման բարձրացման
հետ շղթայի մեջ
մտցնենք ![]() դիմադությունն
այնպես, որ հաստատված
հոսանքի մեծությունը
մնա անփոփոխ: Այս
դեպքում տեղաշարժման
ժամանակի փոքրացումը
տեղի կունենա էլեկտրամագնիսի
փաթույթի ժամանակի
հաստատունի փոքրացման
շնորհիվ: Այս սխեմայի
թերությունն այն
է, որ լրացուցիչ
դիմադրության
մեջ լինում են
հզորության կորուստներ:
Նկ.6.4բ սխեմայում
կոճին հաջորդաբար
միացված դիմադրությունը
շունտված է C ունակությամբ:
Սխեմայի էությունն
այն է, որ փաթույթի
հաստատված ռեժիմում,
այսինքն, երբ այն
երկարատև միացված
է էլեկտրական շղթային,
ունակությամբ
հոսանք չի անցնում:
Հաստատված հոսանքի
մեծությունը որոշվում
է հետևյալ բանաձևով.
դիմադությունն
այնպես, որ հաստատված
հոսանքի մեծությունը
մնա անփոփոխ: Այս
դեպքում տեղաշարժման
ժամանակի փոքրացումը
տեղի կունենա էլեկտրամագնիսի
փաթույթի ժամանակի
հաստատունի փոքրացման
շնորհիվ: Այս սխեմայի
թերությունն այն
է, որ լրացուցիչ
դիմադրության
մեջ լինում են
հզորության կորուստներ:
Նկ.6.4բ սխեմայում
կոճին հաջորդաբար
միացված դիմադրությունը
շունտված է C ունակությամբ:
Սխեմայի էությունն
այն է, որ փաթույթի
հաստատված ռեժիմում,
այսինքն, երբ այն
երկարատև միացված
է էլեկտրական շղթային,
ունակությամբ
հոսանք չի անցնում:
Հաստատված հոսանքի
մեծությունը որոշվում
է հետևյալ բանաձևով.
![]()
Փաթույթը
հոսանքին միացնելու
առաջին իսկ պահին,
երբ տեղի է ունենում
հոսանքի աճ, կոնդենսատորով
նույնպես անցնում
է ![]() հոսանք, որը գումարվում
է լրացուցիչ
հոսանք, որը գումարվում
է լրացուցիչ ![]() դիմադրության
միջով անցնող
դիմադրության
միջով անցնող
![]() հոսանքին: Հետևաբար
անցնող
հոսանքին: Հետևաբար
անցնող ![]() աշխատանքային
հոսանքը մեծանում
է, որը հանգեցնում
է տեղաշարժման
հոսանքի մեծացմանը:
աշխատանքային
հոսանքը մեծանում
է, որը հանգեցնում
է տեղաշարժման
հոսանքի մեծացմանը:
Սա կոչվում է էլեկտրամագնիսի արագացման սխեմա: Տեղաշարժման ժամանակի մեծությունը կախված է կոնդենսատորի ունակությունից, որի մեծությունը`
![]()
որտեղ
![]() -ը
կոճի ինդուկտիվությունն
է,
-ը
կոճի ինդուկտիվությունն
է, ![]() -ը
` ակտիվ դիմադրությունը,
իսկ
-ը
` ակտիվ դիմադրությունը,
իսկ ![]() -ը`
լրացուցիչ դիմադրությունը:
-ը`
լրացուցիչ դիմադրությունը:
Նկ. 6.5-ում տրված է տեղաշարժման ժամանակի կախվածությունը կոնդենսատորի ունակությունից:
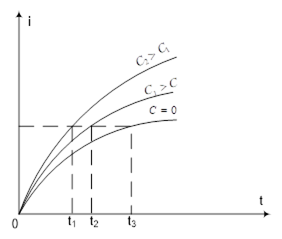
Նկ. 6.5 Տեղաշարժման ժամանակի կախվածությունը ունակությունից
Նկ. 6.4, գ- ում ցույց է տրված հոսանքի արագացման սխեման, որը որոշ չափով փոքրացնում է նաև էլեկտրամագնիսի կշիռը և չափերը: Այս էլեկտրամագնիսն ունի փաթույթի փոքր դիմադրություն, բայց նրան հաջորդաբար միացնում են լրացուցիչ դիմադրություն, որը շունտավորվում է էլեկտրամագնիսի խարսխին կապված անջատող կոնտակտով: Եթե կոճով հոսանք չի անցնում, ուրեմն այդ կոնտակտը փակ է: Վերջինս բացվում է այն ժամանակ, երբ էլեկտրամագնիսի կոճի հոսանքը հասնում է տեղաշարժման հոսանքին: Խարիսխը փակվելուց հետո անջատող կոնտակտը բացվում է, և լրացուցիչ դիմադրությունը հաջորդաբար միանում է փաթույթին, որի շնորհիվ փաթույթի հաստատված հոսանքի մեծությունը մնում է անփոփոխ: Դիմադրությունը շղթային հաջորդաբար միացնելու նպատակն այն է, որ էլեկտրամագնիսի կոճը չայրվի : Թերությունը անջատող կոնտակտի առկայությունն է:
Այն դեպքում, երբ պահանջվում է կրճատել էլեկտրամագնիսի անջատման ժամանակը, կարելի է օգտվել էլեկտրամագնիսի կոճը ունակությամբ շունտավորելու սխեմայից (նկ.6.6) :
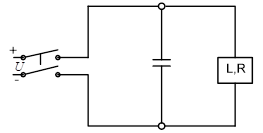
Նկ. 6.6 Ունակության միջոցով անջատման ժամանակի
փոքրացման սխեմա
Այսպիսի
սխեմայի դեպքում
կարելի է ստանալ
անջատման ժամանակի
մեծացում կամ կրճատում`
կախված սխեմայի
պարամետրերի ընտրությունից:
Եթե ունակությունն
ընտրվի այնպես,
որ անջատվելիս
փաթույթով անցնող
հոսանքն ունենա
ոչ պարբերական
բնույթ, ապա այս
դեպքում անջատման
ժամանակը կմեծանա:
Իսկ եթե ունակությունն
ընտրվի այնպես,
որ էլեկտրամագնիսի
կոճը ցանցից անջատվելիս
ապահովի ![]() կոնտուրում
հոսանքի պարբերական
փոփոխությունը,
ապա անջատման
ժամանակը կփոքրանա:
կոնտուրում
հոսանքի պարբերական
փոփոխությունը,
ապա անջատման
ժամանակը կփոքրանա:
Հոսանքի բարձրհաճախական տատանումը հանգեցնում է ձգող ուժի արագ փոքրացմանը, և զսպանակի հակազդող ուժի ազդեցությամբ խարիսխը ետ է դառնում:
6.3. ԴԱՆԴԱՂ ԳՈՐԾՈՂ ԷԼԵԿՏՐԱՄԱԳՆԻՍՆԵՐ
Երբեմն անհրաժեշտ է լինում, որ էլեկտրամագնիսները դանդաղ գործեն, այսինքն` աշխատեն ժամանակի պահումով, օրինակ` ժամանակի ռելեները, ժամանակի պահումով հոսանքի ռելեները և այլն:
Գոյություն ունի ժամանակի պահում ստեղծելու երկու եղանակ.
1)Հատուկ մեխանիկական սարքերի, օրինակ, ժամացույցի մեխանիզմի, յուղային դեմպֆերի (մարիչի), էլեկտրաշարժիչների, օդաճնշող մեխանիզմների և այլ սարքերի օգնությամբ:
Նշված եղանակով ժամանակի պահում ստեղծվում է` խարսխի շարժման ժամանակը մեծացնելով:
2)Մագնիսական դեմպֆերացման (մարման հանգստացման) միջոցով, հենց իր` էլեկտրամագնիսի օգնությամբ:
Մագնիսական դեմպֆերացում կոչվում է մագնիսական հոսքի փոփոխության պրոցեսի դանդաղեցումը համակարգում:
Այսպիսի մարման բոլոր եղանակները հիմնված են մրրկային մագնիսական հոսքի օգտագործման վրա, որը ծագում է էլեկտրամագնիսի կոճում և զանգվածային մասերում` հիմնական մագնիսական հոսքի մեծության փոփոխության դեպքում:
Մարման նպատակով էլեկտրամագնիսում օգտագործում են կարճ միացված գալար, որը հագցվում է միջուկին` տարբեր եղանակներով (նկ. 6.7, ա, բ, գ) :
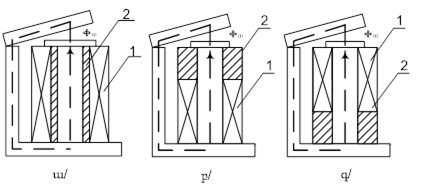
|
Նկ.6.7 Կարճ միացված գալարով էլեկտրամագնիսներ 1-փաթույթ, 2-պղնձյա կարճ միացված գալար |
Կարճ
միացված գալարը
պղնձից, արույրից
կամ ալյումինից
պատրաստված գալար
կամ օղակ է ( նկ.6.7
): Այն աշխատում
է հետևյալ կերպ.
էլեկտրամագնիսի
1 փաթույթը էլեկտրական
շղթայի միացնելու
կամ անջատելու
պահին կարճ միացված
գալարում մրրկային
հոսքերից առաջացած
մագնիսական հոսքերը
մշտապես ուղղված
են հիմնական ![]() հոսքի
(նկ.6.8) նկատմամբ այնպես,
որ պահպանեն մագնիսական
համակարգի նախնական
վիճակը: Այսինքն`
խարիսխը ձգելիս
դրանք ուղղվում
են հիմնական հոսքին
հակառակ և արգելակում
դրա աճը, իսկ անջատելիս
փոքրանում են և
գումարվում հիմնական
հոսքին`
հոսքի
(նկ.6.8) նկատմամբ այնպես,
որ պահպանեն մագնիսական
համակարգի նախնական
վիճակը: Այսինքն`
խարիսխը ձգելիս
դրանք ուղղվում
են հիմնական հոսքին
հակառակ և արգելակում
դրա աճը, իսկ անջատելիս
փոքրանում են և
գումարվում հիմնական
հոսքին` ![]() (
(![]() -ն
կարճ միացված
գալարի առաջացրած
հակահոսքն է) :
-ն
կարճ միացված
գալարի առաջացրած
հակահոսքն է) :
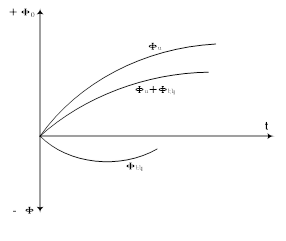
|
Նկ. 6.8 Հոսքերի փոփոխումը միացման պահին |
Այս
էլեկտրամագնիսներում
անջատման ժամանակի
պահումը շատ ավելի
մեծ է ստացվում,
քան միացման ժամանակինը:
Դա բացատրվում
է նրանով, որ անջատվելիս
խարիսխը գտնվում
է ձգված վիճակում,
որի դեպքում օդային
բացակի ![]() մեծությունը
չափազանց փոքր
է, իսկ ինդուկտիվությունը
մեծ, հետևաբար
մեծ է նաև փաթույթի
ժամանակի T հաստատունը:
Այս տիպի համակարգերում
ժամանակի պահում
կարելի է ստանալ
5-10 վ-ի սահմաններում:
Ամենալավ արդյունքը
ստացվում է այն
դեպքում, երբ կարճ
միացված գալարը
դասավորված է միջուկի
երկարությամբ
(նկ.6.7 ա):
մեծությունը
չափազանց փոքր
է, իսկ ինդուկտիվությունը
մեծ, հետևաբար
մեծ է նաև փաթույթի
ժամանակի T հաստատունը:
Այս տիպի համակարգերում
ժամանակի պահում
կարելի է ստանալ
5-10 վ-ի սահմաններում:
Ամենալավ արդյունքը
ստացվում է այն
դեպքում, երբ կարճ
միացված գալարը
դասավորված է միջուկի
երկարությամբ
(նկ.6.7 ա):
Էլեկտրամագնիսի միացված պահին դեմպֆերացման եղանակն ավելի քիչ արդյունավետ է, քան անջատման պահին, քանի որ առաջին դեպքում էլեկտրամագնիսն ունի օդային մեծ բացակ, հետևաբար` ժամանակի փոքր հաստատուն:
Անջատման
պահին տեղաշարժման
ժամանակի մեծությունը
կախված է կարճ
միացված գալարի
ակտիվ դիմադրությունից,
վերջնական օդային
բացակի և հակազդող
մեխանիկական ուժերի
մեծություններից:
Ինչքան փոքր լինեն
այս պարամետրերը,
այնքան մեծ կստացվի
անջատման տեղա-շարժման
ժամանակը: Հետևաբար`փոխելով
վերջնական օդային
բացակի (![]() ),
այսինքն` ոչ մագնիսական
ներդիրը, ինչպես
նաև վերջնական
հակազդող ուժերի
մեծությունը, կարելի
է կարգավորել էլեկտրամագնիսի
անջատման ժամանակը:
),
այսինքն` ոչ մագնիսական
ներդիրը, ինչպես
նաև վերջնական
հակազդող ուժերի
մեծությունը, կարելի
է կարգավորել էլեկտրամագնիսի
անջատման ժամանակը:
Մրրկային հոսքերը և դրանց առաջացրած մագնիսական հոսքերը մեծացնելու նպատակով էլեկտրամագնիսի մագնիսական շղթան պատրաստում են հոծ ֆեռոմագնիսական նյութից, որն ունի փոքր տեսակարար էլեկտրական դիմադրություն: Այդ նպատակով մագնիսալարը պատրաստում են Э 10 կամ 20 մակնիշի պողպատներից, որոնց տեսակարար դիմադրությունը`
![]() Օմ.սմ:
Օմ.սմ:
Երբեմն էլեկտրամագնիսի միացման տեղաշարժման ժամանակը մեծացնելու նպատակով կիրառում են մի շարք էլեկտրական սխեմաներ (նկ. 6.9 ա, բ, գ) :
Նկ. 6.9 ա սխեմայում էլեկտրամագնիսի փաթույթին հաջորդաբար միացված է ինդուկտիվ դիմադրություն, որի հետևանքով անցողիկ պրոցեսում մեծանում է համակարգի ժամանակի հաստատունը, իսկ հաստատված հոսանքի մեծությունը մնում է անփոփոխ:

|
Նկ. 6.9 Սխեմատիկ եղանակով դանդաղ գործողության էլեկտրամագնիսներ |
Անջատման
տեղաշարժման ժամանակը
մեծացնելու նպատակով
օգտագործում են
տարբեր սխեմաներ,
որոնցից երկուսը
բերված են նկ. 6.9,
բ, գ–ում: Նկ. 6.9, բ-ում
էլեկտրամագնիսի
կոճին զուգահեռ
միացված է ![]() դիմադրությունը,
իսկ 6.9, գ-ում`
ուղղիչ հակառակ
բևեռականությամբ:
դիմադրությունը,
իսկ 6.9, գ-ում`
ուղղիչ հակառակ
բևեռականությամբ:
Նկ. 6.9, բ սխեմայի համար տեղաշարժման անջատման ժամանակը կարելի է որոշել հետևյալ բանաձևով.
![]()
Բանաձևից
երևում է, որ ![]() -ի
մեծությունը ուղիղ
համեմատական է
-ի
մեծությունը ուղիղ
համեմատական է
![]() -ին:
Էլեկտրամագնիսի
միացման պահին
-ին:
Էլեկտրամագնիսի
միացման պահին
![]() -ի
մեծացումը հանգեցնում
է էլեկտրաէներգիայի
կորստի մեծացմանը
( նկ.6.9, գ սխեման զերծ
է այդ թերությունից):
-ի
մեծացումը հանգեցնում
է էլեկտրաէներգիայի
կորստի մեծացմանը
( նկ.6.9, գ սխեման զերծ
է այդ թերությունից):
Կոճերի շունտավորման սխեմաները, հաշված զանգվածային մագնիսալարի հետ, հնարավորություն են տալիս խարսխի անջատման դեպքում էլեկտրամագնիսի բանեցման ժամանակը հասցնել 0.5 – 0.7 վ-ի:
ՅՈԹԵՐՈՐԴ ԳԼՈՒԽ
7.1. ՀԱՍՏԱՏՈՒՆ ՄԱԳՆԻՍՆԵՐ
Հաստատուն մագնիսներ կոչվում են այն ֆեռոմագնիսական մարմինները, որոնք ունեն մնայուն մագնիսականություն, այսինքն` նախօրոք մագնիսացած լինելով, ստեղծում են մագնիսական հոսք` առանց հոսանքի: Դրանք պատրաստվում են մագնիսակարծր նյութերից, որոնք ունեն մագնիսական հիստերեզիսի լայն օղակ, այսինքն` մեծ կոէրցիտիվ ուժ:
Արտադրում են հատևյալ մակնիշներով`
1. Մարտենսիտային պողպատներ:
ա) Y-10 , ածխածնային, որն օգտագործում են փոքր չափերի մագնիսներ պատրաստելու համար ,
բ) EX-3, քրոմական , ( 3 % քրոմ),
գ) EB-6 , վոլֆրամային ( 6 % վոլֆրամ),
դ) EK-5, EK-15, EK-3, կոբալտային:
Ներկայումս ռելեների և էլեկտրական ապարատների կառուցվածքներում հազվադեպ են օգտագործում մարտենսիտային պողպատներ, դրանք ունեն փոքր մագնիսական էներգիա ու կոէրցիտիվ ուժ և համեմատաբար ավելի թանկ են:
2. Ձուլված մագնիսակարծր համաձուլվածքներ: Պարունակում են երկաթ, նիկել, ալյումին:
Ներկայումս ռելեների կառուցվածքում մեծ մասամբ օգտագործում են միայն այս տիպի համաձուլվածքներ, քանի որ դրանք ունեն մեծ կոէրցիտիվ ուժ և մագնիսական էներգիա:
Արտադրում են հատևյալ մակնիշներով`
ա) AH - ալնի` Ni – 22%, Al – 11%, մնացածը ` Fe,
բ) AHK - ալնիսի` Ni – 33%, Al – 13.5%, Si -1.5% և մնացածը ` Fe ,
գ) AHKO - ալնիկո` Ni – 18%, Al – 10%, Co -12%, Cu -6% և մնացածը ` Fe,
դ) MAГHИKO - Ni – 14%, Al – 6%, Co -24%, Cu -3% և մնացածը ` Fe:
Օգտագործում են նաև էլեկտրական մեքենաների և ապարատների արտադրության մեջ:
3. Պլաստիկ ձևափոխվող համաձուլվածքներ: Պարունակում են արծաթ, պղինձ, կոբալտ:
Օգտագործում են էլեկտրաչափիչ , վիբրացիոն փոքրածավալ սարքերում և մագնիսաչափերում:
Հաստատուն մագնիսները լինում են հետևյալ ձևերի.
П-աձև կամ պայտաձև (նկ.7.1), գլանաձև (նկ.7.2), օղակաձև (նկ.7.3), ատամնավոր (նկ.7.4):

|
Նկ. 7.1 Պայտաձև մագնիսներ |
Նկ. 7.2 Գլանաձև մագնիս |
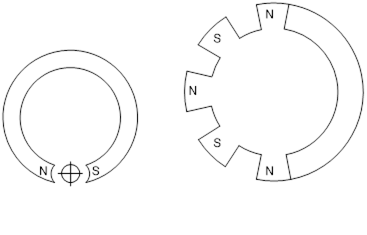
|
Նկ. 7.3 Օղակաձև մագնիս |
Նկ. 7.4 Ատամնավոր մագնիս |
Պայտաձև կամ П-աձև հաստատուն մագնիսները պատրաստում են այնպիսի նյութերից, որոնք ունեն փոքր կոէրցիտիվ ուժ: Օղակաձև մագնիսները օգտագործում են զանազան էլետրաչափիչ սարքերում և ռելեներում: Գլանաձև հաստատուն մագնիսները պատրաստում են մեծ կոէրցիտիվ ուժ ունեցող նյութերից և կիրառում փոքրածավալ ռելեներում: Ատամնավոր մագնիսներն օգտագործում են էլեկտրամագնիսական համակարգերում, էլեկտրական մեքենաներում և արգելակներում:
7.2. ՀԱՍՏԱՏՈՒՆ ՄԱԳՆԻՍՆԵՐԻ ԱՊԱՄԱԳՆԻՍԱՑՄԱՆ ԿՈՐԸ
Ֆեռոմագնիսական
նյութերի հիմնական
բնութագիրը ![]() (նկ.7.5) կախվածությունն
է:
(նկ.7.5) կախվածությունն
է: ![]() -ը
մնացորդային ինդուկցիան
է,
-ը
մնացորդային ինդուկցիան
է, ![]() -ը` հագեցման
ինդուկցիան,
-ը` հագեցման
ինդուկցիան, ![]() `
կոէրցիտիվ ուժը:
`
կոէրցիտիվ ուժը:
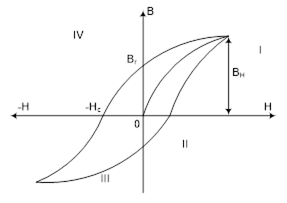
|
Նկ. 7.5 Հաստատուն մագնիսի իմնական բնութագիրը(հիսթերեզիսի օղակ) |
Հաստատուն մագնիսների համար մեծ նշանակություն ունի կորի այն մասը, որը գտնվում է II քառորդում և կոչվում է ապամագնիսացման կոր (նկ.7.6):
Հաստատուն
մագնիսներ ստանալու
համար անհրաժեշտ
է ստեղծել փակ
մագնիսական շղթա
(նկ.7.7), միացնել հոսանքը
և այնքան մեծացնել,
որ միջուկը հագենա:
Այնուհետև հոսանքն
անջատում ենք
, և ստացվում է հաստատուն
մագնիս (նկ.7.8), որի
ինդուկցիան ![]() է:
Մագնիսն օգտագործելու
համար անհրաժեշտ
է ստեղծել օդային
բացակ (նկ.7.9), որի
հետևանքով ինդուկցիան
մագնիսի ներսում
փոքրանում է, որովհետև
մագնիսական շղթայի
դիմադրությունը
մեծանում է: Օդային
բացակ ստեղծելուց
հետո մագնիսի
ներսի ինդուկցիան
որոշվում է հետևյալ
հաջորդականությամբ.
է:
Մագնիսն օգտագործելու
համար անհրաժեշտ
է ստեղծել օդային
բացակ (նկ.7.9), որի
հետևանքով ինդուկցիան
մագնիսի ներսում
փոքրանում է, որովհետև
մագնիսական շղթայի
դիմադրությունը
մեծանում է: Օդային
բացակ ստեղծելուց
հետո մագնիսի
ներսի ինդուկցիան
որոշվում է հետևյալ
հաջորդականությամբ.
ա) գտնում ենք օդային բացակի մագնիսական հաղորդականությունը
բ)
այնուհետև` ![]() -ն
-ն
![]()
որտեղ
![]() -ը
և
-ը
և ![]() -ն,
H-ը և B-ն
համապատասխան
առանցքների մասշտաբի
գործակիցներն
են,
-ն,
H-ը և B-ն
համապատասխան
առանցքների մասշտաբի
գործակիցներն
են,
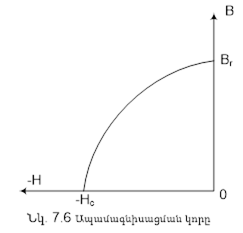
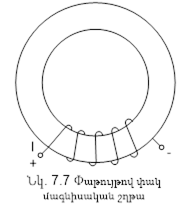
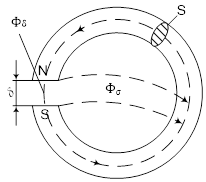
|
Նկ. 7.8 Փակ մագնիսական շղթա առանց փաթույթի |
Նկ.7.9 Օղաձև մագնիս բացակով |
գ)
ապամագնիսացման
կորի առանցքների
0 կետից ![]() անկյան
տակ տանում ենք
ճառագայթ մինչև
կորի A կետի հետ
հատվելը: A կետից
(նկ.7.10) -H առանցքին
իջեցված ուղղահայացը`
AK-ն, ինդուկցիան
է մագնիսի ներսում
անկյան
տակ տանում ենք
ճառագայթ մինչև
կորի A կետի հետ
հատվելը: A կետից
(նկ.7.10) -H առանցքին
իջեցված ուղղահայացը`
AK-ն, ինդուկցիան
է մագնիսի ներսում
![]() բացակի
համար, իսկ H-ը` միջուկի
մագնիսական դաշտի
լարվածությունը:
բացակի
համար, իսկ H-ը` միջուկի
մագնիսական դաշտի
լարվածությունը:
Ապացուցում: Տվյալ մագնիսական շղթայի համար գրենք Կիրխհոֆի 2-րդ օրենքը.
![]()
![]()
կամ ![]() ,
,
որտեղից
![]()
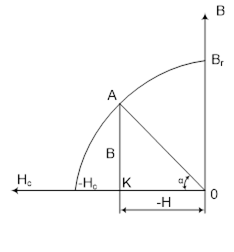
|
Նկ. 7.10 Օղակի բացակում ինդուկցիայի որոշումը |
Եթե հաշվի առնենք նաև ցրման հոսքերը, նախ պետք է որոշել համակարգի ցրման գործակիցը`
![]()
7.3. ՀԱՍՏԱՏՈՒՆ ՄԱԳՆԻՍՆԵՐԻ ԱՊԱՄԱԳՆԻՍԱՑՄԱՆ
ԿՈՐԻ ԿԱՌՈՒՑՈՒՄԸ
Ապամագնիսացման կորը կարելի է կառուցել երկու եղանակով`
ա) գրաավերլուծական, բ) գրաֆիկական:
Կորը գրաավերլուծական եղանակով կառուցելիս օգտվում ենք հետևյալ բանաձևից.
![]() (7.1)
(7.1)
Տվյալ
նյութի համար
![]() -ն
և
-ն
և ![]() -ն
հաստատուն մեծություններ
են: H -ին տալով մի
քանի արժեքներ
և օգտվելով (7.1) բանաձևից`
համապատասխանորեն
գտնում ենք B-ի արժեքները
և այդ տվյալներով
կառուցում ապամագնիսացման
կորը:
-ն
հաստատուն մեծություններ
են: H -ին տալով մի
քանի արժեքներ
և օգտվելով (7.1) բանաձևից`
համապատասխանորեն
գտնում ենք B-ի արժեքները
և այդ տվյալներով
կառուցում ապամագնիսացման
կորը:
Կորը
գրաֆիկական եղանակով
կառուցելիս տվյալ
նյութի համար
նախօրոք պետք է
հայտնի լինեն
![]() -ը,
-ը,
![]() -ը և
-ը և ![]() -ն,
որոնց արժեքները
վերցնում ենք
համապատասխան
աղյուսակներից:
Այնուհետև դրանք
տեղադրում ենք
կոորդինատների
համապատասխան
առանցքների վրա:
-ն,
որոնց արժեքները
վերցնում ենք
համապատասխան
աղյուսակներից:
Այնուհետև դրանք
տեղադրում ենք
կոորդինատների
համապատասխան
առանցքների վրա:
![]() և
և ![]() կետերը միացնում
ենք իրար և ստանում
K կետը: K կետը 0 կետի
հետ միացնում
ենք ուղիղ գծով
և ստանում 0A ուղիղը:
A կետից կամավոր
տանում ենք ճառագայթներ
, որոնք
կետերը միացնում
ենք իրար և ստանում
K կետը: K կետը 0 կետի
հետ միացնում
ենք ուղիղ գծով
և ստանում 0A ուղիղը:
A կետից կամավոր
տանում ենք ճառագայթներ
, որոնք ![]() գծի
հետ հատվում են
1,2,3 կետերում, իսկ
գծի
հետ հատվում են
1,2,3 կետերում, իսկ
![]() գծի
հետ` 1’, 2’, 3’ կետերում,
որից հետո համապատասխան
կետերն իրար միացնելով`
ստանում ենք ապամագնիսացման
կորի կետերը, դրանք
էլ իրար միացնելով`
կառուցում ենք
տվյալ նյութի
ապամագնիսացման
կորը /նկ.7.11/:
գծի
հետ` 1’, 2’, 3’ կետերում,
որից հետո համապատասխան
կետերն իրար միացնելով`
ստանում ենք ապամագնիսացման
կորի կետերը, դրանք
էլ իրար միացնելով`
կառուցում ենք
տվյալ նյութի
ապամագնիսացման
կորը /նկ.7.11/:
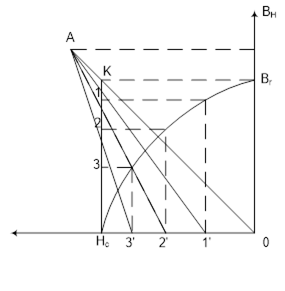
|
Նկ.7.11 Ապամագնիսացման կորի կառուցումը |
7.4. ՀԱՍՏԱՏՈՒՆ ՄԱԳՆԻՍՆԵՐԻ ԴԱՐՁԻ ԿՈՐԸ
Հաստատուն մագնիսներ պատրաստելիս աշխատանքի պրոցեսում կարող է փոխվել սկզբնական օդային բացակի մեծությունը:
Վերջինս փոքրացնելիս փոփոխվում է նաև մագնիսի ներսում ինդուկցիայի մեծությունը, բայց փոփոխությունը այս դեպքում կատարվում է ոչ թե ապամագնիսացման, այլ դարձի կորով:
Դիցուք
տրված է հաստատուն
մագնիս (նկ.7.12, ա), որի
ինդուկցիան հավասար
է մագնիսի մնացորդային`
![]() ինդուկցիային:
Մագնիսի վրա ստեղծենք
ինդուկցիային:
Մագնիսի վրա ստեղծենք
![]() օդային
բացակ (նկ.7.12, բ): Այս
դեպքում մագնիսի
ինդուկցիան փոքրանում
է` դառնալով
օդային
բացակ (նկ.7.12, բ): Այս
դեպքում մագնիսի
ինդուկցիան փոքրանում
է` դառնալով ![]() ,
որը փոքր է
,
որը փոքր է ![]() –ից:
–ից:
![]() որոշելու համար
գտնում ենք
որոշելու համար
գտնում ենք ![]() :
:
![]() անկյան
տակ տանում ենք
ճառագայթ և ապամագնիսացման
կորի վրա գտնում
անկյան
տակ տանում ենք
ճառագայթ և ապամագնիսացման
կորի վրա գտնում
![]() աշխատանքային
կետը (նկ.7.13): Եթե մագնիսի
աշխատանքային
բացակը նորից
փակենք (նկ.7.12,ա), ապա
մագնիսի ինդուկցիան
հավասար կլինի
ոչ թե նախկին
աշխատանքային
կետը (նկ.7.13): Եթե մագնիսի
աշխատանքային
բացակը նորից
փակենք (նկ.7.12,ա), ապա
մագնիսի ինդուկցիան
հավասար կլինի
ոչ թե նախկին ![]() մնացորդային
ինդուկցիային,
այլ նրանից փոքր
կլինի`
մնացորդային
ինդուկցիային,
այլ նրանից փոքր
կլինի` ![]() :
Դա բացատրվում
է նրանով, որ
:
Դա բացատրվում
է նրանով, որ ![]() բացակ ստեղծելիս
մագնիսը մասամբ
մագնիսաթափվեց,
որի հետևանքով
փոքրացավ նրա մնացորդային
ինդուկցիան: Այժմ
եթե
բացակ ստեղծելիս
մագնիսը մասամբ
մագնիսաթափվեց,
որի հետևանքով
փոքրացավ նրա մնացորդային
ինդուկցիան: Այժմ
եթե ![]() բացակը
(նկ.7.12,գ) աստիճանաբար
փոքրացնենք, մագնիսի
ինդուկցիան համապատասխանաբար
կմեծանա: Բայց
ինդուկցիան կմեծանա
ոչ թե ապամագնիսացման,
այլ
բացակը
(նկ.7.12,գ) աստիճանաբար
փոքրացնենք, մագնիսի
ինդուկցիան համապատասխանաբար
կմեծանա: Բայց
ինդուկցիան կմեծանա
ոչ թե ապամագնիսացման,
այլ ![]() կորով:
Եթե բացակը նորից
մեծացնենք և հասցնենք
կորով:
Եթե բացակը նորից
մեծացնենք և հասցնենք
![]() արժեքին,
ինդուկցիան կփոքրանա
արժեքին,
ինդուկցիան կփոքրանա
![]() կորով
(նկ.7.13): Այս կորերը
տվյալ նյութի
ապամագնիսացման
և մագնիսացման
մասնակի ցիկլեր
են և կոչվում են
դարձի կորեր: Օղակի
լայնության փոքրության
պատճառով այն կարելի
է փոխարինել
կորով
(նկ.7.13): Այս կորերը
տվյալ նյութի
ապամագնիսացման
և մագնիսացման
մասնակի ցիկլեր
են և կոչվում են
դարձի կորեր: Օղակի
լայնության փոքրության
պատճառով այն կարելի
է փոխարինել ![]() ուղիղ գծով , որը
կոչվում է դարձի
գիծ:
ուղիղ գծով , որը
կոչվում է դարձի
գիծ:
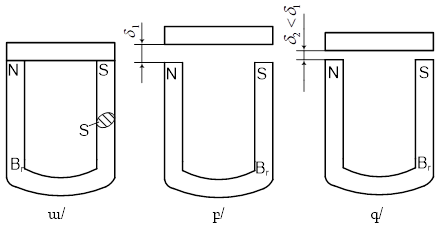
|
Նկ. 7.12 Հաստատուն մագնիսի օդային բացակի փոփոխումը |
Հաստատուն մագնիսների նյութերը բնութագրվում են դարձի գործակցով`
![]()
Իմանալով
մագնիսի տվյալ
նյութի դարձի գործակիցը`
կարող ենք որոշել
նրա ինդուկցիան,
եթե օդային բացակը
արժեքից փոքրացել
է ` ![]() :
:
Այդ
նպատակով նախ
որոշում ենք ![]() ,
որից հետո ապամագնիսացման
կորի 0 կետից
,
որից հետո ապամագնիսացման
կորի 0 կետից ![]() անկյան տակ
անկյան տակ
տանում
ենք ճառագայթ և
գտնում ![]() կետը:
կետը: ![]() կետից
կետից ![]() անկյան
տակ տանում ենք
դարձի գիծը , որը
հատվում է
անկյան
տակ տանում ենք
դարձի գիծը , որը
հատվում է ![]() ուղղի հետ m կետում:
m կետը ցույց է
տալիս
ուղղի հետ m կետում:
m կետը ցույց է
տալիս ![]() ինդուկցիայի մեծությունը
ինդուկցիայի մեծությունը
![]() բացակի համար:
բացակի համար:
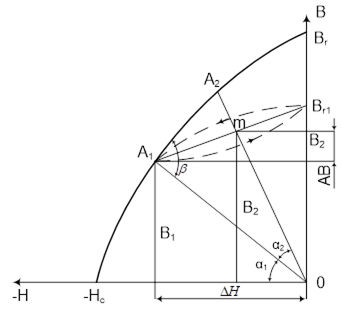
|
Նկ. 7.13. Հաստատուն մագնիսի դարձի գիծը |
ԻՆՆԵՐՈՐԴ ԳԼՈՒԽ
9.1. ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ՓԱԹՈՒՅԹԻ ՀԱՇՎԱՐԿԸ
Էլեկտրամագնիսի մագնիսական շղթայի հաշվարկն ավարտելուց հետո անցնում ենք փաթույթի հաշվարկին, որի նպատակն է որոշել նրա պարամետրերը, այսինքն` հաղորդալարի տրամագիծը, փաթույթի գալարների թիվը, դիմադրությունը և հոսանքը, որը տրված մագնիսական հոսքի կամ լարման դեպքում կստեղծի պահանջվող մագնիսաշարժ ուժը, և տրված աշխատանքային ռեժիմի համար կապահովվի կոճի գերտաքացումը նորմայով նախատեսված ջերմաստիճանի սահմաններում:
Էլեկտրամագնիսների փաթույթները մեծ մասամբ պատրաստում են պղնձյա հաղորալարերից, որոնք մեկուսացվում են մետաքս-բամբակյա թելերով կամ էմալապատվում են:
Էլեկտրամագնիսներում առավելապես օգտագործում են էմալային մեկուսացումով ПЭВ մակնիշի հաղորդալարեր, որոնք քիչ տեղ են զբաղեցնում, դիմանում են ավելի բարձր ջերմաստիճանի և տնտեսապես ավելի ձեռնտու են: Գործնականում էլեկտրամագնիսի կոճերը կարելի է փաթաթել երեք եղանակով.
1)Շարքային փաթաթում, երբ գալարներն իրար վրա են փաթաթում. սա հնարավոր է այն դեպքում, երբ d >>0.35մմ:
2)Շախմատաձև փաթաթում , երբ d >0.4… 0.5մմ:
3)Խառը փաթաթում, երբ d < 0.35մմ:
9.2. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ՓԱԹՈՒՅԹԻ ՊԱՐԱՄԵՏՐԵՐԻ ՀԱՇՎԱՐԿԸ
Հաստատուն հոսանքի էլեկտրամագնիսի փաթույթը էլեկտրական շղթային կարող է միացվել երկու եղանակով` զուգահեռ և հաջորդաբար (նկ.9.1 ա, բ):
ա) Նախ հաշվենք զուգահեռ միացված փաթույթի պարամետրերը:
Հաշվարկի համար տրված են լինում Uն-ն, F-ը և մագնիսալարի չափերը: Հաշվարկը պետք է կատարել մագնիսական շղթան հաշվելուց հետո, որպեսզի հայտնի լինի էլեկտրամագնիսի մագնիսաշարժ ուժը` F-ը:
Հաշվարկի նպատակն է որոշել d-ն , W-ն , R-ը , I-ն:
Հաղորդալարի տրամագիծը` d-ն , որոշում ենք հետևյալ ձևով. փաթույթի դիմադրությունը`
![]() (9.1)
(9.1)
որտեղ ![]() -ը
փաթույթի մի գալարի
միջին երկարությունն
է:
-ը
փաթույթի մի գալարի
միջին երկարությունն
է:
Կլոր կոճերի համար այն հավասար է`
![]() :
:
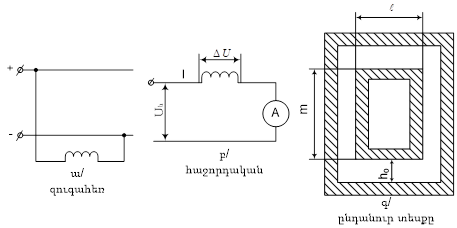
|
Նկ. 9.1 Փաթույթի տեսքը և միացման եղանակները |
Ուղղանկյուն կոճերի համար (նկ.9.1, գ )
![]()
9.1 բանաձևից կստանանք .
![]() ,
,
![]() -ն տեսակարար
դիմադրությունն
է.
-ն տեսակարար
դիմադրությունն
է.
![]() – Օմ.մմ2/մ,
– Օմ.մմ2/մ,
![]() -
մ , F – Ա.գ :
-
մ , F – Ա.գ :
Հաղորդալարի տրամագիծը պետք է վերցնել ըստ հաստատված չափանիշների:
Որոշենք W-ն` ելնելով փաթույթի լցման գործակցից` Kլց-ից:
Հայտնի է, որ
![]()
Այստեղ փաթույթների գալարների թիվը`
![]() :
:
Ակտիվ դիմադրությունը կլոր կոճերի համար `
![]()
կամ
![]()
Ուղղանկյուն կոճերի համար`
![]()
Տեսնենք, թե ինչ կապ կա W-ի և R-ի միջև.
![]() (9.2)
(9.2)
![]() -ը
հաղորդալարի լայնական
հատույթի մակերեսն
է: Մյուս կողմից`
-ը
հաղորդալարի լայնական
հատույթի մակերեսն
է: Մյուս կողմից`
![]()
որտեղից
![]()
Այս արժեքը տեղադրելով (9.2) –ում, կստանանք.
![]()
Տվյալ փաթույթի համար
![]()
Այդ դեպքում
(9.2)-ից կարող ենք
գրել ` ![]() , այսինքն` էլեկտրամագնիսի
փաթույթի դիմադրությունն
ուղիղ համեմատական
է գալարների թվի
քառակուսուն:
, այսինքն` էլեկտրամագնիսի
փաթույթի դիմադրությունն
ուղիղ համեմատական
է գալարների թվի
քառակուսուն:
Այժմ որոշենք փաթույթով անցնող հոսանքի մեծությունը.
![]() կամ
կամ ![]()
բ) Շղթային հաջորդաբար
միացված փաթույթի
պարամետրերի հաշվարկը:
Եթե փաթույթը հաջորդաբար
է միացված շղթային,
ապա պետք է տրված
լինեն ![]() -ն, F-ը և թույլատրելի
լարման անկումը`
∆
-ն, F-ը և թույլատրելի
լարման անկումը`
∆![]() -ն, որը պետք է
լինի (2.5% -5%),
-ն, որը պետք է
լինի (2.5% -5%), ![]() -ն: Քանի որ կոճը
հաջորդաբար է միացված,
նրա միջով անցնում
է մեծ հոսանք, ուստի
նպատակահարմար
է վերցնել ուղղանկյուն
հաղորդալար (նկ.9.2):
-ն: Քանի որ կոճը
հաջորդաբար է միացված,
նրա միջով անցնում
է մեծ հոսանք, ուստի
նպատակահարմար
է վերցնել ուղղանկյուն
հաղորդալար (նկ.9.2):
|
Նկ. 9.2 Ուղղանկյուն հաղորդալար |
1. Սկզբում
որոշենք W գալարների
թիվը: Քանի որ տրված
է աշխատանքային
հոսանքը` ![]() -ն, և հայտնի է
F-ը, ապա
-ն, և հայտնի է
F-ը, ապա
![]()
2. Որոշենք
![]() -ը` հաղորդալարի
հատույթի մակերեսը:
Փաթույթում տեղի
ունեցող լարման
անկումը`
-ը` հաղորդալարի
հատույթի մակերեսը:
Փաթույթում տեղի
ունեցող լարման
անկումը`
∆![]()
կամ
∆![]()
որտեղից
![]()
![]() :
:
3. Դիմադրությունը`
![]()
կամ
![]()
9.3. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ՓԱԹՈՒՅԹԻ ՊԱՐԱՄԵՏՐԵՐԻ ՀԱՇՎԱՐԿԸ
ա) Փաթույթի զուգահեռ միացման դեպքում: Հաշվարկի նպատակն է որոշել W-ն, d-ն ,R-ը , XL-ը, Z-ը և I-ն: Կարելի է որոշել մի քանի եղանակով:
1. Եթե տրված է ցանցի U լարումը և հայտնի է լրիվ Φ հոսքը, այդ դեպքում ( եթե փաթույթի լարման անկումն անտեսենք` IR=0 ) գալարների թիվը`
![]()
Եթե
![]() , որտեղ
, որտեղ ![]() :
:
2. Եթե տրված
են U-ն և օդային բացակի
մագնիսական հաղորդականությունները`
![]() -ն
ու
-ն
ու ![]() -ն
, ուրեմն`
-ն
, ուրեմն`
![]() (նորից մոտավոր
կերպով )
(նորից մոտավոր
կերպով )
3. Եթե հայտնի
են առանց մեկուսացման
հաղորդալարի d
տրամագիծը կամ
![]() լայնական հատույթի
մակերեսը, ինչպես
նաև կոճի չափերը`
լայնական հատույթի
մակերեսը, ինչպես
նաև կոճի չափերը`
![]() , ուրեմն
, ուրեմն
![]()
կամ
![]()
Եթե
ցանկանանք ավելի
ճիշտ հաշվել W-ն,
պետք է հաշվի առնենք
նաև փաթույթի լարման
անկումը` ![]() : Դրա համար
օգտվում ենք հետևյալից:
Հայտնի է, որ կոճին
տրվող լարումը`
: Դրա համար
օգտվում ենք հետևյալից:
Հայտնի է, որ կոճին
տրվող լարումը`
![]()
որտեղ
![]() -ը
կոճում լարման
անկումն է, իսկ
-ը
կոճում լարման
անկումն է, իսկ
![]() -ը`
կոճում առաջացած
հակաէլեկտրաշարժ
ուժը:
-ը`
կոճում առաջացած
հակաէլեկտրաշարժ
ուժը:
![]() :
(9.3)
:
(9.3)
Կոճում հզորության կորուստը`
![]() ( 9.4)
( 9.4)
որտեղ
![]() –ն
–ն
կոճի
արտաքին և ներքին
սառեցման մակերեսն
է: ![]() -ն տեսակարար
սառեցման մակերեսն
է, որը կախված է
-ն տեսակարար
սառեցման մակերեսն
է, որը կախված է
![]() հարաբերությունից.
եթե
հարաբերությունից.
եթե ![]() , ապա
, ապա ![]() սմ2/Վտ , եթե
սմ2/Վտ , եթե ![]() ,
ապա
,
ապա ![]() սմ2/Վտ:
սմ2/Վտ:
![]() -ն այնպիսի մեծություն
է, որը ցույց է տալիս,
թե կոճի յուրաքանչյուր
Վտ հզորության
կորստին քանի սմ2
սառեցման մակերես
է անհրաժեշտ, որպեսզի
կոճի տաքացումը
նորմայով թույլատրվող
ջերմաստիճանից
ավել չլինի:
-ն այնպիսի մեծություն
է, որը ցույց է տալիս,
թե կոճի յուրաքանչյուր
Վտ հզորության
կորստին քանի սմ2
սառեցման մակերես
է անհրաժեշտ, որպեսզի
կոճի տաքացումը
նորմայով թույլատրվող
ջերմաստիճանից
ավել չլինի:
Քանի որ ![]() , ապա 9.4 –ից կարելի
է գրել`
, ապա 9.4 –ից կարելի
է գրել`
![]() , իսկ
, իսկ ![]()
հետևաբար
![]() ,
,
որտեղից
![]()
իսկ ![]() արժեքը տեղադրելով
(9.3)-ում, կստանանք
արժեքը տեղադրելով
(9.3)-ում, կստանանք
![]()
![]() ,
,
![]()
կամ
![]()
որտեղից
Գալարների W թիվը որոշելուց հետո գտնում ենք հաղորդալարի տրամագիծը` ելնելով փաթույթի լցման գործակցից.
![]() :
:
Այժմ որոշենք ռեակտիվ դիմադրությունը`
![]()
ակտիվ դիմադրությունը`
![]()
իսկ լրիվ դիմադրությունը`
![]()
բ) Այժմ դիտարկենք
այն դեպքը , երբ
էլեկտրամագնիսի
կոճը հաջորդաբար
է միացված: Այստեղ
տրված են աշխատանքային
![]() հոսանքը և
հոսանքը և ![]() մագնիսաշարժ
ուժը:
մագնիսաշարժ
ուժը:
Գալարների թիվը`
![]()
Հաղորդալարի հատույթի մակերեսը`
![]()
Ակտիվ դիմադրությունը`
![]()
Ռեակտիվ դիմադրությունը`
![]()
Լրիվ դիմադրությունը`
![]()
իսկ հոսանքը`
![]()
9.4. ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ՓԱԹՈՒՅԹԻ ՎԵՐԱՀԱՇՎԱՐԿԸ
ՄԻ ԼԱՐՈՒՄԻՑ (ԿԱՄ ՀՈՍԱՆՔԻՑ) ՄԻ ԱՅԼ ԼԱՐՄԱՆ
(ԿԱՄ ՀՈՍԱՆՔԻ) ԱՆՑՆԵԼՈՒ ԴԵՊՔՈՒՄ
Երբեմն անհրաժեշտ է լինում կատարել էլեկտրամագնիսի փաթույթի վերահաշվարկ մի լարումից մի այլ լարման անցնելու համար, եթե զուգահեռ է միացված, կամ մի հոսանքից մի այլ հոսանքի անցնելու համար, եթե հաջորդաբար է միացված: Վերահաշվարկը պետք է կատարվի այն պայմանով , որ էլեկտրամագնիսի ձգող ուժը լինի նույնը, իսկ կոճի չափերը մնան անփոփոխ, այսինքն`
![]()
1)Հաստատուն հոսանքի շղթային զուգահեռ միացման դեպքում:
Տրված են էլեկտրամագնիսի
փաթույթի պարամետրերը.
լարումը` ![]() ,
հաղորդալարի տրամագիծը`
,
հաղորդալարի տրամագիծը`
![]() ,
գալարների թիվը`
,
գալարների թիվը`
![]() ,
փաթույթի դիմադրությունը`
,
փաթույթի դիմադրությունը`
![]() և հոսանքը`
և հոսանքը` ![]() :
Պահանջվում է նույն
էլեկտրամագնիսի
փաթույթը հաշվարկել
:
Պահանջվում է նույն
էլեկտրամագնիսի
փաթույթը հաշվարկել
![]() լարման
համար, անհրաժեշտ
է որոշել
լարման
համար, անհրաժեշտ
է որոշել ![]() -ը,
-ը,
![]() -ը
,
-ը
, ![]() -ը
և
-ը
և ![]() –ը:
–ը:
Խնդիրը լուծվում է հետևյալ հաջորդականությամբ:
Քանի
որ ![]() ,
դրանից հետևում
է, որ
,
դրանից հետևում
է, որ ![]()
կամ
![]() ( 9.5)
( 9.5)
մյուս կողմից`
![]()
Այս արժեքները տեղադրելով (9.5)-ում, կստանանք`
![]() որտեղից
որտեղից ![]() :
:
Հաղորդալարի
գալարների թիվը
որոշելիս ելնում
ենք կոճի չափերի
անփոփոխ մնալու
պայմանից, այսինքն`
![]() կամ
կամ
![]()
Կոճի
R դիմադրությունը
որոշվում է հետևյալ
կերպ. հայտնի է,
որ ![]()
հետևաբար
![]() կամ
կամ
![]()
2)Հաստատուն հոսանքի շղթային հաջորդական միացման դեպքում:
Տրված են լինում
փաթույթի
պարամետրերը. հոսանքը`
![]() ,
գալարների
թիվը`
,
գալարների
թիվը` ![]() ,
դիմադրությունը`
,
դիմադրությունը`
![]() և
հաղորդալարի հատույթի
մակերեսը
և
հաղորդալարի հատույթի
մակերեսը ![]() :
Պահանջվում է
:
Պահանջվում է ![]() հոսանքի համար
կատարել վերահաշվարկ
, այսինքն` որոշել
հոսանքի համար
կատարել վերահաշվարկ
, այսինքն` որոշել
![]() -ը
,
-ը
, ![]() -ը
և
-ը
և ![]() -ը
:
-ը
:
Խնդիրը լուծվում է հետևյալ հաջորդականությամբ:
![]() ,
որտեղից
,
որտեղից ![]() :
:
Այստեղ
![]()
![]()
3)Փոփոխական հոսանքի շղթային զուգահեռ միաց-ման դեպքում:
Տրված են ![]() -ը
,
-ը
, ![]() -ը
,
-ը
, ![]() -ը,
-ը,
![]() -ը,
-ը,
![]() -ը
: Պահանջվում վերահաշվարկ
կատարել
-ը
: Պահանջվում վերահաշվարկ
կատարել ![]() լարման
համար և որոշել
լարման
համար և որոշել
![]() -ը,
-ը,
![]() -ը,
-ը,
![]() -ը,
-ը,![]() -ը
և
-ը
և ![]() -ը:
-ը:
Ելնում ենք հետևյալ պայմաններից`
ա)
![]() :
:
Փոփոխական
հոսանքի դեպքում
![]() ,
ուստի , ըստ
,
ուստի , ըստ
ա) պայմանի
![]()
որտեղից
![]()
Այժմ
որոշենք ![]() -ը
` ելնելով բ/ պայմանից.
-ը
` ելնելով բ/ պայմանից.
![]()
որտեղից
![]()
Որոշենք ![]() -ը,
-ը,![]() -ը
և
-ը
և ![]() -ը:
-ը:
![]() ,
,
![]() :
:
4)Փոփոխական հոսանքի շղթային հաջորդական միացման դեպքում:
Տրված են ![]() -ը,
-ը,
![]() -ը,
-ը,
![]() -ը,
-ը,
![]() -ը,
-ը,
![]() -ը:
Պետք է վերահաշվարկ
կատարել
-ը:
Պետք է վերահաշվարկ
կատարել ![]() -ի
համար և որոշել
-ի
համար և որոշել
![]() -ը
,
-ը
, ![]() -ը
,
-ը
, ![]() -ը,
-ը,
![]() -ը
և
-ը
և ![]() -ը:
Վերահաշվարկի
կատարման հաջորդակա-նությունը.
-ը:
Վերահաշվարկի
կատարման հաջորդակա-նությունը.
ա)
![]()
բ)
![]() ,
,
![]()
գ) ![]() ,
,
դ) ![]() ,
,
![]()
9.5. ԷԼԵԿՏՐԱՄԱԳՆԻՍԻ ՓԱԹՈՒՅԹԻ ՋԵՐՄԱՅԻՆ ՀԱՇՎԱՐԿԸ
Էլեկտրամագնիսի փաթույթի պարամետրերը որոշելուց հետո կատարվում է դրա ջերմային հաշվարկը, որի նպատակն է աշխատանքային տարբեր ռեժիմների համար որոշել էլեկտրամագնիսի կոճի գերտաքացումը և այն համեմատել նորմայով թույլատրելի գերտաքացման հետ: Գերտաքացումը`
![]() ,
,
որտեղ
![]() –ն
կոճի բացարձակ
ջերմաստիճանն
է,
–ն
կոճի բացարձակ
ջերմաստիճանն
է, ![]() -ը`
միջավայրի ջերմաստիճանը:
-ը`
միջավայրի ջերմաստիճանը:
Օրինակ.
ПЭЛ հաղորդալարի
համար ![]() :
Եթե
:
Եթե ![]() ,
ապա
,
ապա ![]() :
:
Էլեկտրամագնիսի կոճն աշխատում է երեք աշխատանքային ռեժիմներում.
ա) երկարատև կամ հարատև աշխատաքային ռեժիմ, որի տաքացման կորը նկ. 9.3-ի կորն է,
բ) կարճատև աշխատաքային ռեժիմ ` 2 կորը,
գ) կրկնվող կարճատև աշխատաքային ռեժիմ ` 3 կորը:
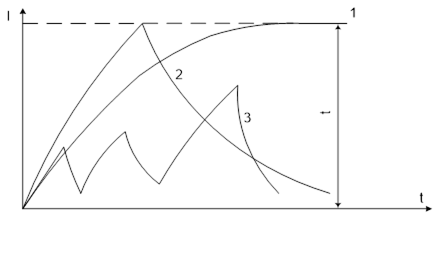
|
Նկ. 9.3 Աշխատանքային ռեժիմների կորերը |
1. Փաթույթի ջերմային հաշվարկը հարատև աշխատանքային ռեժիմի համար:
Էլեկտրամագնիսի փաթույթի տարբեր մասերում ջերմաստիճանը տարբեր է, նկ.9.4:
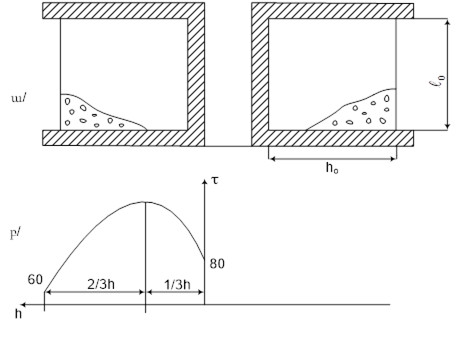
|
Նկ. 9.4 Ջերմության բաշխվածությունը փաթույթի ներսում |
Փաթույթի գերտաքացումը որոշելու համար օգտվում ենք ջերմային հաշվարկի հավասարումից.
![]() ,
( 9.6)
,
( 9.6)
որտեղ`
![]() -ն ցանցից
ստացված էներգիան
է
-ն ցանցից
ստացված էներգիան
է ![]() ժամանակամիջոցում,
ժամանակամիջոցում,
![]() -ն`
ջերմային էներգիայի
այն մասը, որը ծախսվում
է կոճի ջերմաստիճանը
բարձրացնելու
համար,
-ն`
ջերմային էներգիայի
այն մասը, որը ծախսվում
է կոճի ջերմաստիճանը
բարձրացնելու
համար, ![]() -ն` հաղորդալարի
կշիռը (գ ),
-ն` հաղորդալարի
կշիռը (գ ), ![]() -ն` տեսակարար
ջերմունակությունը,
(Վտ.վ/գ.աստ),
-ն` տեսակարար
ջերմունակությունը,
(Վտ.վ/գ.աստ), ![]() -ն` տարրական
գերտաքացումը,
-ն` տարրական
գերտաքացումը,
![]() –ն`
էներգիայի այն
մասը, որը տրվում
է արտաքին միջավայրին,
որպես ջերմային
կորուստ,
–ն`
էներգիայի այն
մասը, որը տրվում
է արտաքին միջավայրին,
որպես ջերմային
կորուստ, ![]() -ն`
ջերմատվության
գործակիցը, (Վտ/սմ
2 C),
-ն`
ջերմատվության
գործակիցը, (Վտ/սմ
2 C), ![]() -ը`կոճի
սառեցման մակերեսը
(ներքին և արտաքին),
սմ 2, նկ.9.4:
-ը`կոճի
սառեցման մակերեսը
(ներքին և արտաքին),
սմ 2, նկ.9.4:
![]() :
:
Հաշվարկի
նպատակն է որոշել
![]() -ը
և այն համեմատել
նորմայով թույլատրելի
գերտաքացման
`
-ը
և այն համեմատել
նորմայով թույլատրելի
գերտաքացման
` ![]() -ի
հետ :
-ի
հետ :
Եթե տաքացումը հասել է հաստատված ջերմաստիճանին, ապա կոճն այլևս չի տաքանում և (9.6)-ից կարելի է գրել.
![]() ,
որտեղից
,
որտեղից ![]() ( 9.7)
( 9.7)
Այս բանաձևը ձևափոխենք, քանի որ
![]()
Իսկ ըստ նկ. 9.4 , ա-ի `
![]()
Որտեղ`
![]() -ն հաղորդալարի
տեսակարար դիմադրությունն
է, (Օմ.սմ2/մ),
-ն հաղորդալարի
տեսակարար դիմադրությունն
է, (Օմ.սմ2/մ),
![]() -ը`
կոճի մի գալարի
միջին երկարությունը,
(մ),
-ը`
կոճի մի գալարի
միջին երկարությունը,
(մ),
![]() -ը` հաղորդալարի
լայնական հատույթի
մակերեսը, (սմ 2) ,
-ը` հաղորդալարի
լայնական հատույթի
մակերեսը, (սմ 2) ,
![]() -ն`
կոճի գալարների
թիվը,
-ն`
կոճի գալարների
թիվը,
![]() -ը,
-ը,
![]() -ը`
փաթույթի լայնությունն
ու երկարությունը,
(սմ),
-ը`
փաթույթի լայնությունն
ու երկարությունը,
(սմ),
![]() -ը`
կոճի արտաքին և
ներքին սառեցման
մակերեսը, (սմ 2)
,
-ը`
կոճի արտաքին և
ներքին սառեցման
մակերեսը, (սմ 2)
,
![]() -ն,
-ն,
![]() -ն`
փաթույթի արտաքին
և ներքին տրամագծերը
, (սմ ),
-ն`
փաթույթի արտաքին
և ներքին տրամագծերը
, (սմ ),
![]() -ը`
փաթույթի լցման
գործակիցը,
-ը`
փաթույթի լցման
գործակիցը,
![]() -ն`
փաթույթի ջերմատվության
գործակիցը, (Վտ. սմ 2/ C):
-ն`
փաթույթի ջերմատվության
գործակիցը, (Վտ. սմ 2/ C):
Եթե նշված արժեքները տեղադրենք (9.7)-ում և բոլոր մեծություններն արտահայտենք մմ-ով, կստանանք.
![]()
կամ
![]()
Այս
բանաձում ![]() -ը
և
-ը
և ![]() -ն
արտահայտված են
մմ-ով:
-ն
արտահայտված են
մմ-ով:
2. Կարճատև
աշխատանքային
ռեժիմի համար:
Այս ռեժիմում տվյալ
ապարատի փաթույթով
(հարատև աշխատանքային
ռեժիմի հետ համեմատած)
![]() անգամ
ավելի մեծ հոսանք
կարող ենք բաց
թողնել, այն պայմանով,
որ փաթույթի գերտաքացումը
հաստատված ջերմաստիճանից
ավել չլինի, նկ.9.5:
անգամ
ավելի մեծ հոսանք
կարող ենք բաց
թողնել, այն պայմանով,
որ փաթույթի գերտաքացումը
հաստատված ջերմաստիճանից
ավել չլինի, նկ.9.5:
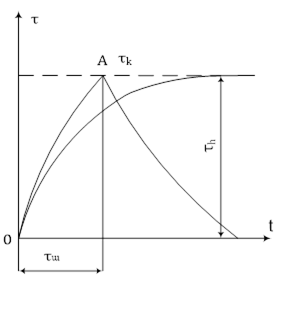
|
Նկ. 9.5 Կարճատև և երկարատև աշխատանքային ռեժիմների կորերը |
Այս դեպքում բեռնավորման գործակիցն ըստ հզորության`
![]() ,
,
որտեղ
![]() -ը և
-ը և ![]() -ը կարճատև և
հարատև աշխատան-քային
ռեժիմների հզորություններն
են: Քանի որ
-ը կարճատև և
հարատև աշխատան-քային
ռեժիմների հզորություններն
են: Քանի որ
![]() և
և
![]() ,
,
ուստի
![]() ( 9.8)
( 9.8)
Հայտնի է, որ
![]()
Վերջինս տեղադրելով ( 9.8)-ում մեջ, կստանանք`
![]() ( 9.9)
( 9.9)
որտեղ
![]() -ն կարճատև աշխատանքային
ռեժիմի աշխատան-քային
ժամանակն է , (վ.)
-ն կարճատև աշխատանքային
ռեժիմի աշխատան-քային
ժամանակն է , (վ.)
![]() -ը` տաքացման
ժամանակի հաստատունը,
(վ.) ,
-ը` տաքացման
ժամանակի հաստատունը,
(վ.) , ![]() -ն`
հաղորդալարի քաշը,
(գ.),
-ն`
հաղորդալարի քաշը,
(գ.), ![]() -ն`
տեսակարար ջերմունակու-թյունը,
(Վտ.վ/գ.աստ):
-ն`
տեսակարար ջերմունակու-թյունը,
(Վտ.վ/գ.աստ):
Եթե
աշխատանքային
![]() ժամանակը, համեմատած
տաքացման ժամանակի
ժամանակը, համեմատած
տաքացման ժամանակի
![]() հաստատունի
հետ , շատ ավելի
փոքր մեծություն
է`
հաստատունի
հետ , շատ ավելի
փոքր մեծություն
է` ![]() , ապա ( 9.9) բանաձևը
կարելի է պարզեցնել.
, ապա ( 9.9) բանաձևը
կարելի է պարզեցնել.
![]() ( 9.10)
( 9.10)
Քանի որ ![]() , ապա անտեսելով
, ապա անտեսելով
![]() 1-ից ավելի բարձր
աստիճանի մեծությունը,
կստացվի`
1-ից ավելի բարձր
աստիճանի մեծությունը,
կստացվի`
![]()
Տեղադրելով այս արժեքը (9.9)-ում, կստանանք`
Քանի որ ![]() ,
,
ապա
![]() (9.11)
(9.11)
և ![]() (9.12)
(9.12)
Այսպիսով, եթե
նախօրոք հայտնի
է տվյալ ապարատի
հարատև աշխատանքայի
հզորությունը,
ապա օգտագործելով
(9.11) կամ (9.12) բանաձևը,
կարող ենք որոշել
թե տվյալ կարճատև
աշխատանքային
![]() ժամանակի համար
որքան պետք է լինի
ժամանակի համար
որքան պետք է լինի
![]() հզորությունը,
որպեսզի փաթույթի
տաքացումը հարատև
աշխատանքային
ռեժիմի համար
հաստատված ջերմաստիճանից
ավել չլինի:
հզորությունը,
որպեսզի փաթույթի
տաքացումը հարատև
աշխատանքային
ռեժիմի համար
հաստատված ջերմաստիճանից
ավել չլինի:
Որոշենք բեռնավորման գործակիցն ըստ հոսանքի.
![]() ,
մյուս կողմից
`
,
մյուս կողմից
` ![]()
Ուրեմն`
![]() կամ
կամ ![]() ,
,
իսկ կարճատև աշխատանքային ռեժիմի հոսանքը`
![]() կամ
կամ ![]()
Օրինակ: Որոշել
կարճատև հոսանքի
![]() մեծությունը
6 րոպե աշխատանքային
ժամանակի դեպքում,
եթե կոճով անցնող
հարատև աշխատանքային
հոսանքը`
մեծությունը
6 րոպե աշխատանքային
ժամանակի դեպքում,
եթե կոճով անցնող
հարատև աշխատանքային
հոսանքը` ![]() , նրա
, նրա ![]() րոպե
և
րոպե
և ![]() , այն պայմանով,
որ նրա գերտաքացումը
, այն պայմանով,
որ նրա գերտաքացումը
![]() -ից ավել չի լինի:
-ից ավել չի լինի:
Լուծում: Ըստ (9.7)-ի`
![]()
Այս դեպքում
![]()
իսկ
![]()
3.
Կրկնվող
կարճատև աշխատանքային
ռեժիմի համար:
Այս ռեժիմում
նույնպես ապարատով
![]() անգամ
ավելի մեծ հոսանք
կարող ենք բաց
թողնել, քան հարատև
աշխատանքային
ռեժիմում, նկ.9.6:
անգամ
ավելի մեծ հոսանք
կարող ենք բաց
թողնել, քան հարատև
աշխատանքային
ռեժիմում, նկ.9.6:
Բեռնավորման գործակիցն ըստ հզորության`
![]()
ըստ հոսանքի`
![]()
որտեղ
![]() -ն աշխատանքային
ժամանակն է,
-ն աշխատանքային
ժամանակն է, ![]() -ը` ընդմիջման
ժամանակը, նկ.9.6:
-ը` ընդմիջման
ժամանակը, նկ.9.6:
Երբեմն անհրաժեշտ է լինում կրկնվող կարճատև աշխատանքային ռեժիմի համար որոշել հոսանքի խտությունը և այն համեմատել նորմայով թույլատրելի խտության հետ: Քանի որ կրկնվող կարճատև աշխատանքային ռեժիմը փոքր ժամանակ է, ուստի այդ ընթացքում կոճը չի հասցնում արտաքին միջավայրին ջերմություն հաղորդել, և ցանցից ստացված ամբողջ ջերմային էներգիան ծախսվում է կոճը տաքացնելու համար: Այդ դեպքում ջերմային հաշվեկշռի հավասարումը կլինի.
![]()
Տեղադրելով
![]() և
և ![]() կստանանք`
կստանանք`
![]()
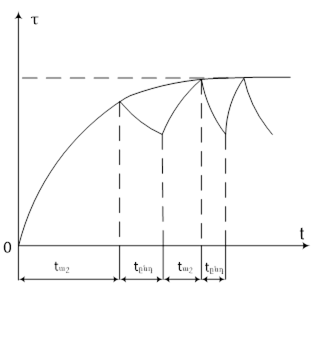
|
Նկ. 9.6 Կարճատև-կրկնվող աշխատանքային ռեժիմի կորը |
Պղնձի
համար ![]() ,
, ![]() ,
, ![]() :
:
Ըստ նորմաների,
երկարատև աշխատանքային
ռեժիմում` ![]() , կարճատևում`
, կարճատևում`
![]() , կրկնվող կարճատևում`
, կրկնվող կարճատևում`
![]() :
:
Օրինակ:
Որոշել պղնձե
հաղորդալարի թույլատրելի
հոսանքի մեծությունը,
երբ ![]() ,
, ![]() ,
, ![]() :
:
Լուծում:
![]()
![]()
4.
Կոճի
տաքացման մոտավոր
հաշվարկը: Կոճի
մոտավոր գերտաքացումը
որոշելիս օգտվում
են փարձնական
տվյալներից: Փորձով
ապացուցված է,
որ էմալապատ հաղորդալարից
պատրաստվաճ կոճի
ամենաբարձր ջերմաստիճանը
չի գերազանցի ![]() -ից, եթե կոճում
արտադրվող յուրաքանչյուր
Վտ հզորությանը
համապա-տասխանի
որոշակի տեսակարար
կողմնային մակերես:
Ընդ որում
-ից, եթե կոճում
արտադրվող յուրաքանչյուր
Վտ հզորությանը
համապա-տասխանի
որոշակի տեսակարար
կողմնային մակերես:
Ընդ որում ![]() -ի արժեքը կախված
է
-ի արժեքը կախված
է ![]() -ից:
-ից:
Եթե ![]() ,
ապա
,
ապա ![]() , եթե
, եթե ![]() ,
ապա
,
ապա ![]() , եթե
, եթե ![]() ,
ապա
,
ապա ![]() :
:
Եթե գոյություն
ունի այս պայմանը`
![]() ,
նշանակում է, որ
կոճի գերտաքացումը
նորմայով նախատեսվածից
ավել չի լինի:
,
նշանակում է, որ
կոճի գերտաքացումը
նորմայով նախատեսվածից
ավել չի լինի:
Օրինակ:
Տրված է` ![]() :
:
Լուծում:
![]()
![]()
Դա նշանակում է, որ կոճը նորմայով թույլատրելի ջերմաստիճանից շատ ավելի քիչ է տաքանում: