|
|
|
Սուրեն Մելիքսեթի Հովսեփյան |
ՀՏԴ 621.313
ԳՄԴ
Էլեկտրական մեքենաներ և տրանսֆորմատորներ: ՈՒսումնական ձեռնարկ, 1 մաս: Եր.: Ճարտարագետ, 2009, 113 էջ:
ՈՒսումնական ձեռնարկում դիտարկվում են տրանսֆորմատորների և ասինխրոն մեքենաների կառուցվածքների և գործարկման հիմնահարցերը: Կատարվում է դրանց աշխատանքային ռեժիմների վերլուծություն, ինչպես նաև շահագործման խնդիրների լուսաբանում: Գրքում ներառված է 58 նկ. և 1 աղ.:
Ձեռնարկը նախատեսված է ՀՊՃՀ-ի էլեկտրատեխնիկական և էներգետիկական ֆակուլտետների ուսանողների համար:
Գրախոս` Գ.Ա.Շահինյան
Խմբագիր` Ն.Ա.Խաչատրյան
Բովանդակություն
1.1. Հիմնական տեղեկություններ տրանսֆորմատորների մասին
1.2.Տրանսֆորմատորների մագնիսալարերը
1.3. Եռաֆազ տրանսֆորմատորների փաթույթների միացնան սխեմաները և խմբերը
1.4. Տրանսֆորմատորների լարումների և մշու-ների հավասարումները
1.6. Տրանսֆորմատորի փոխարինման սխեման
1.7. Միաֆազ տրանսֆորմատորի պարապ ընթացքի ռեժիմ
1.8. Տրանսֆորմատորի պարապ ընթացքի կորուստները
1.9 Տրանսֆորմատորի կարճ միացման ռեժիմը
1.11. Եռաֆազ տրանսֆորմատորի կարճ միացումը
1.12.Տրանսֆորմատորի աշխատանքը բեռի տակ
1.13. Տրանսֆորմատորի էներգետիկ դիագրաման
1.14. Տրանսֆորմատորի երկրրորդային լարման փոփոխությունը
1.15. Տրանսֆորմատորի լարման կարգավորումը
1.16. Տրանսֆորմատորի օգտակա գարծաղության գարծակիցը
1.17. Տրանսֆորմատորի զուգահեռ աշխատանքը
2. Փոփոխական հոսանքի էլեկտրական մեքենաներ
2.2. Ասինխրոն մեքենայի կառուցվածքը և աշխատանքի սկզբունքը
2.3. Ասինխրոն մեքենայի աշխատանքը անշարժ ռոտորի դեպքում
2.4. Ասինխրոն շարժիչի լարումների և հոսանքների հավասարումները
2.5. Ասինխրոն շարժիչի վեկտորական դիագրաման
2.6. Ասինխրոն շարժիչի փոխարինման սխեման
2.7. Ասինխրոն մեքենայի աշխատանքային ռեժիմները
2.8. Ասինխրոն շարժիչի կորուստները և օ.գ.գ.-ն
2.9. Ասինխրոն մեքենայի էլեկտրամագնիսական մոմենտը
2.10. Ասինխրոն շարժիչի կայուն աշխատանքի պայմանները
2.12. Ասինխրոն շարժիչի բանվորական բնութագրերը
2.13.Ասինխրոն շարժիչի պարապ ընթացքի և կարճ միացման փորձերը
2.14. Ասինխրոն շարժիչի թողարկումը
2.15. Խորը փորակներով և երկվանդակ ասինխրոն շարժիչներ
2.16.Ասինխրոն շարժիչի արագության կարգավորումը
ՈՒսումնական ձեռնարկը գրվել է «Էլեկտրատեխնիկա, էլեկտրամեխամիկա, էլեկտրատեխնոլոգիա» և «Էլեկտրաէներգետիկա» մասնագիտությունների «էլեկտրական մեքենաներ և տրանսֆորմատորներ» առարկայի ուսումնական ծրագրին համապատասխան:
ՈՒսումնական ձեռնարկում ուսումնական նյութը ներկայացված է երկու բաժիններով. տրանսֆորմատորներ և ասինխրոն մեքենաներ:
ՈՒսումնական ձեռնարկի «Տրանսֆորմատորներ» բաժնում քննարկվում են տրանսֆորմատորների հիմնական սկզբունքային և կառուցվածքային տեսակները, տրանսֆորմատորի աշխատանքի սկզբունքը, փոխարինման սխեման, Մշու-ների և Էլշու-ների հավասարումները, միաֆազ տրանսֆորմատորի պարապ ընթացքի ռեժիմը, պարապ ընթացքի կորուստները, կարճ միացման ռեժիմը, տրանսֆորմատորի աշխատանքը բեռի տակ, զուգահեռ աշխատանքը և լարման կարգավորումը:
Ձեռնարկի «Ասինխրոն մեքենաներ» բաժնում քննարկվում են ասինխրոն մեքենայի կառուցվածքը, աշխատանքային սկզբունքը, հիմնական աշխատանքային ռեժիմները, մեքենայի վեկտորական դիագրամը և փոխարինման սխեման, Էլեկտրամագնիսական մոմենտը, շարժիչի մեխանիկական բնութագրերը, խորը փորակներով և երկվանդակ ասինխրոն շարժիչները, ինչպես նաև եռաֆազ ասինխրոն շարժիչների թողարկումը և արագության կարգավորումը:
1. ՏՐԱՆՍՖՈՐՄԱՏՈՐՆԵՐ
1.1. Հիմնական տեղեկություններ տրանսֆորմատորների մասին
Տրանսֆորմատորը ստատիկ էլեկտրամագնիսական ապարատ է, որը նախատեսված է մի լարման փոփոխական հոսանքը նույն հաճախության մի այլ լարման փոփոխական հոսանքի վերափոխելու համար:
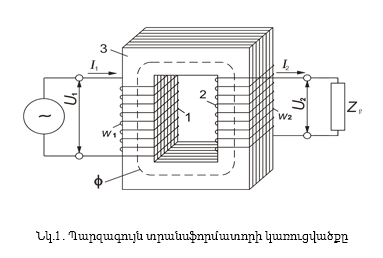
Պարզագույն դեպքում (նկ.1.1) տրանսֆորմատորն ունի մեկ առաջնային փաթույթ` 1, որին մատուցվում է էլեկտրական էներգիան և մեկ երկրորդային փաթույթ` 2, որից էներգիան հաղորդվում է սպառիչին: Էներգիայի հաղորդումը մի փաթույթից մյուսին կատարվում է էլեկտրամագնիսական ինդուկցիայի ճանապարհով: Էլեկտրամագնիսական կապն ուժեղացնելու համար փաթույթները դասավորվում են փակ ֆերոմագնիսական մագնիսալարի վրա` 3: Սովորաբար, մագնիսալարը պատրաստում են 0,35 կամ 0,5մմ հաստության էլեկտրատեխնիկական պողպատի թիթեղներից:
Թիթեղների մեկուսացման համար օգտագործում են 0.03մմ հաստությամբ թուղթ կամ յուղային լաք: Թղթե մեկուսացումը համեմատաբար էժան է ստացվում, բայց այն ունի որոշակի թերություններ (փոքր մեխանիկական ամրություն, փոքր ջերմահաղորդականություն և այլն), որի պատճառով, գործնականում, մեծ կիրառություն ունի թիթեղների մեկուսացման լաքապատման եղանակը:
Գործածենք իդեալական տրանսֆորմատորի հասկացությունը: Իդեալական
անվանում ենք այնպիսի տրանսֆորմատորը, ուր.
1) բացակայում են էներգիայի կորուստները (փաթույթների
դիմադրությունը և պողպատի կորուստները մագնիսալարում ընդունվում են հավասար զրոյի), 2) պողպատի մագնիսական թափանցելիությունը ![]() ,
,
3)
մագնիսական ինդուկցիայի բոլոր գծերն ամբողջությամբ անցնում են մագնիսամիջուկով և յուրաքանչյուր
գիծ կապակցվում է առաջնային ![]() և երկրորդային
և երկրորդային
![]() փաթույթների բոլոր
գալարների հետ:
փաթույթների բոլոր
գալարների հետ:
Երբ
տրանսֆորմատորի առաջնային փաթույթը միացվում է (նկ.1.1) ![]() սինուսոիդալ լարումով ցանցին,
փաթույթում առաջանում է
սինուսոիդալ լարումով ցանցին,
փաթույթում առաջանում է ![]() հոսանք, մագնիսաշարժ ուժ (մշու), որն էլ ստեղծում է մագնիսամիջուկով
փակվող փոփոխվող մագնիսական հոսք
հոսանք, մագնիսաշարժ ուժ (մշու), որն էլ ստեղծում է մագնիսամիջուկով
փակվող փոփոխվող մագնիսական հոսք ![]() : Այդ հոսքն ինդուկտում է (մակածում է) էլշու ինչպես
առաջնային, այնպես էլ երկրորդային փաթույթում: Երկրորդային փաթույթը բեռին
(բեռնվածքին) միացնելու դեպքում այդ փաթույթում առաջանում է
: Այդ հոսքն ինդուկտում է (մակածում է) էլշու ինչպես
առաջնային, այնպես էլ երկրորդային փաթույթում: Երկրորդային փաթույթը բեռին
(բեռնվածքին) միացնելու դեպքում այդ փաթույթում առաջանում է ![]() երկրորդային հոսանք, և նրա
սեղմակներում հաստատվում է որոշակի
երկրորդային հոսանք, և նրա
սեղմակներում հաստատվում է որոշակի ![]() լարում:
լարում:
Մագնիսամիջուկի արդյունարար մագնիսական հոսքը ստեղծվում է երկու փաթույթների հոսանքով:
![]()
Տրանսֆորմատորի առաջնային և երկրորդային փաթույթների էլշու-ները հոսքի սինուսոիդալ փոփոխման դեպքում հավասար են`

որտեղ ![]() -ը տրանսֆորմատորի մագնիսական
հոսքի առավելագույն արժեքն է:
-ը տրանսֆորմատորի մագնիսական
հոսքի առավելագույն արժեքն է:
Էլշու-ների գործող արժեքները`
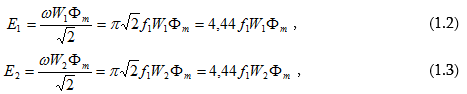
որտեղ ![]() -ը ցանցի հաճախությունն է:
-ը ցանցի հաճախությունն է:
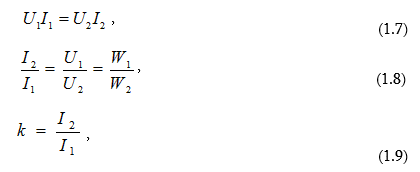
Քանի որ իդեալական տրանսֆորմատորներում լարման անկումները բացակայում են, ապա`
![]()
Այսպիսով`

հարաբերությունը կոչվում է տրանսֆորմատորի տրանսֆորմացիայի գործակից: Ընդունված է տրանսֆորմացիայի գործակիցը որոշել որպես բարձր լարման փաթույթի էլշու-ի (կամ գալարների թվի) հարաբերությունը ցածր լարման փաթույթի էլշու-ին (կամ գալարների թվին), անկախ այն հանգամանքից, թե փաթույթներից որն է առաջնայինը:
Իդեալական տրանսֆորմատորում`
Նշենք, որ իրական տրանսֆորմատորում ստացված հարաբերակցությունները որոշ չափով խախտվում են:
Տրանսֆորմատորը, որն ունի երկու փաթույթ` մեկ առաջնային և մեկ երկրորդային, կոչվում է երկփաթույթ տրանսֆորմատոր:
Մի շարք դեպքերում տրանսֆորմատորները պատրաստվում են երեք փաթույթներով` բարձր, միջին և ցածր լարման փաթույթներով: Այդպիսի տրանսֆորմատորները կոչվում են եռափաթույթ:
Ավելի մեծ թվով փաթույթներ ունեցող տրանսֆորմատորները կոչվում են բազմափաթույթ տրանսֆորմատորներ:
Եթե առաջնային փաթույթը բարձր լարման է, ապա տրանսֆորմատորը կոչվում է ցածրացնող տրանսֆորմատոր: Հակառակ դեպքում, երբ որպես առաջնային փաթույթ հանդես է գալիս ցածր լարման փաթույթը, տրանսֆորմատորը կոչվում է բարձրացնող:
Ավելի հաճախ կիրառվում են միաֆազ և եռաֆազ տրանսֆորմատորները:
Տրանսֆորմատորները, որոնք նախատեսված են էլեկտրաէներգիայի հաղորդման և բաշխման համար, կոչվում են ուժային տրանսֆորմատորներ:
Ուժային տրանսֆորմատորները տրանսֆորմատորների ամենատարածված տեսակներն են: Բացի դրանից, գոյություն ունեն մի շարք տրանսֆորմատորներ հատուկ նպատակների համար` ուղղիչային, եռակցման, չափիչ և այլն:
Ուժային տրանսֆորմատորները լինում են յուղային և չոր: Յուղային տրանսֆորմատորներում մագնիսալարը փաթույթներով տեղադրվում է բաքի մեջ, որը լցված է տրանսֆորմատորային յուղով: Յուղը կատարում է էլեկտրական մեկուսացման և հովացնող գործոնի դեր:
Տրանսֆորմատորները, որոնք ընկղմված չեն յուղի մեջ, կոչվում են չոր տրանսֆորմատորներ:
Յուրաքանչյուր տրանսֆորմատոր բնութագրվում է իր անվանական տվյալներով (հզորություն, լարումներ, հոսանքներ և այլն), որոնք նշվում են տրանսֆորմատորի վահանակի վրա:
Անվանական հզորությունն արտահայտվում է կիլովոլտամպերներով (կՎԱ): Դա տրանսֆորմատորի լրիվ հզորությունն է և ծառայում է առաջնային և երկրորդային անվանական հոսանքները որոշելու համար:
Առաջնային անվանական լարում կոչվում է այն լարումը, ըստ որի հաշվարկվում է տրանսֆորմատորը և, որը մատուցվում է առաջնային փաթույթին:
Երկրորդային անվանական լարում կոչվում է տրանսֆորմատորի երկրորդային փաթույթի լարումը պարապ ընթացքի ժամանակ, երբ առաջնային փաթույթը միացված է անվանական լարմանը:
Առաջնային և երկրորդային անվանական հոսանքներ կոչվում են այն հոսանքները, որոնք որոշվում են անվանական հզորությամբ և համապատասխան անվանական լարումներով:
Նշենք նաև, որ երկփաթույթ տրանսֆորմատորի անվանական հզորությունը վերագրվում է յուրաքանչյուր փաթույթին: Այսինքն, փաթույթների անվանական հզորություններն ընդունվում են իրար հավասար:
1.2. Տրանսֆորմատորների մագնիսամիջուկները
Ըստ մագնիսամիջուկների կառուցվածքի, տրանսֆորմատորները լինում են` ձողային և զրահապատ:
Միաֆազ ձողային տրանսֆորմատորի մագնիսամիջուկն (նկ.1.2,ա) ունի երկու ձող (Ձ), և երկու լուծ (Լ), որոնք ծառայում են փակ մագնիսամիջուկ ստեղծելու համար: Երկու փաթույթներից յուրաքանչյուրը (1 և 2), բաղկացած է երկու մասից, որոնք դասավորված են երկու ձողերի վրա, ընդ որում, այդ մասերը միացվում են կամ հաջորդաբար, կամ էլ զուգահեռ: Այդպիսի դասավորության դեպքում առաջնային և երկրորդային փաթույթները գտնվում են իրար մոտ, որը հանգեցնում է էլեկտրամագնիսական կապի գործակցի մեծացմանը:
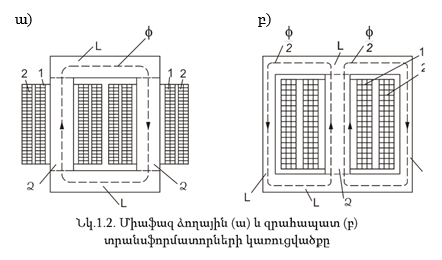
Զրահապատ կառուցվածքի միաֆազ տրանսֆորմատորն (նկ.1.2, բ) ունի մեկ ձող փաթույթներով, և լուծ, որը զրահի նման փակում է փաթույթները:
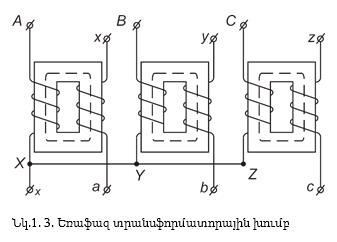
Եռաֆազ տրանսֆորմատոր կարելի է ստանալ երեք միաֆազ տրանսֆորմատորներից, որոնց փաթույթները միացվում են աստղաձև (նկ.1.3) կամ եռանկյունաձև: Տրանսֆորմատորի այդպիսի կառուցվածքն անվանում են եռաֆազ տրանսֆորմատորային խումբ կամ խմբային տրանսֆորմատոր:
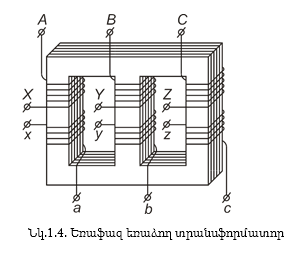
Գործնականում, ավելի հաճախ օգտագործում են եռաֆազ, եռաձող տրանսֆորմատորներ, որոնք ունեն ընդանուր մագնիսալար բոլոր ֆազերի համար (նկ.1.4): Այդպիսի տրանսֆորմատորները համեմատաբար ավելի էժան են:
Եռաֆազ զրահապատ տրանսֆորմատորը կարելի է դիտարկել որպես երեք միաֆազ զրահապատ տրանսֆորմատորներ, որոնք դրված են իրար կողք կողքի կամ մեկը մյուսի վրա:
Նշենք, որ զրահապատ տրանսֆորմատորներում էլեկտրամագնիսական կապի գործակիցը փաթույթների միջև ավելի մեծ է, քան ձողայինում: Չնայած դրան զրահապատ տրանսֆորմատորները մեծ կիրառություն չունեն, քանի որ տրանսֆորմատորի հզորության մեծացման հետ խիստ աճում են նրանց չափերը:
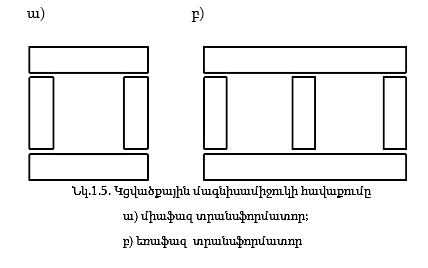
Ձողերը լուծին միացնելու ձևով տարբերում են կցվածքային (նկ.1.5) և շերտադասավորված (նկ.1.6) մագնիսամիջուկով տրանսֆորմատորներ: Առաջին դեպքում ձողերը և լուծերը հավաքվում են առանձին և ամրացվում են իրար համապատասխան ամրացնող դետալների օգնությամբ: Ընդ որում, թիթեղների իրար հետ միացումից խուսափելու համար կցվածքների տեղում դրվում են մեկուսիչ միջադիրներ: Երկրորդ դեպքում ձողերը և լուծերը հավաքվում են միասին, որպես ամբողջական կառուցվածք, ընդ որում, ձողերի և լուծերի առանձին շերտերի թիթեղները հավաքվում են միահյուսված:
Կցվածքային կառուցվածքի դեպքում, կցվածքի տեղերում համապատասխան օդային բացակների առկայությունն առաջացնում է մագնիսալարի մագնիսական դիմադրության զգալի մեծացում և դրա հետևանքով` մագնիսացնող հոսանքի մեծացում: Բացի դրանից, մեկուսիչ միջադիրների առկայությունը թիթեղների հպման լրիվ երաշխիք չի տալիս: Այդ իսկ պատճառով կցվածքային մագնիսամիջուկները հազվադեպ են օգտագործվում:
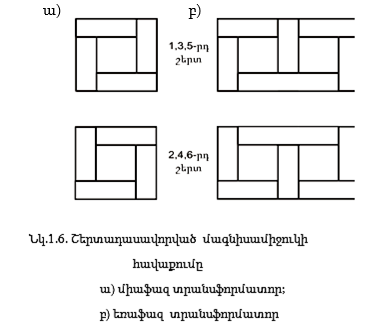
Զրահապատ մագնիսամիջուկների ձողերի կտրվածքներն ունեն ուղղանկյան տեսք, իսկ ձողային մագնիսամիջուկների` բազմանկյան, որը ներգծված է շրջանագծին (նկ.1.7 ա): Այս դեպքում փաթույթները կունենան շրջանային գլանի տեսք և մագնիսամիջուկի աստիճանական կտրվածքի հետևանքով պողպատի լցման գործակիցը կմեծանա: Հզորության մեծացման հետ մագնիսամիջուկի աստիճանների քանակը մեծանում է: Այդպիսի տրանսֆորմատորների հովացման համար մագնիսամիջուկում նախատեսում են ակոսներ, որոնցով շրջանառություն է կատարում տրանսֆորմատորային յուղը (նկ.1. 7բ):
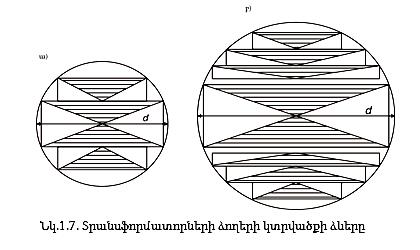
Լուծի կտրվածքի ձևը ընտրվում է` հաշվի առնելով մագնիսական հոսքի հավասարաչափ բաշխման ապահովումը մագնիսամիջուկի կտրվածքում:
1.3. Եռաֆազ տրանսֆորմատորների փաթույթների միացման
սխեմաները և խմբերը
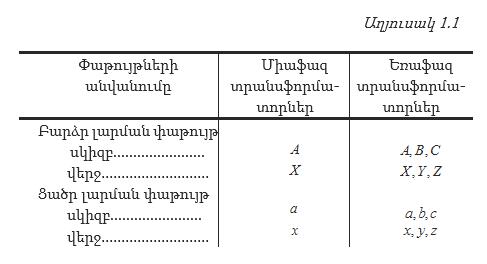
Տրանսֆորմատորի փաթույթների սկզբների և վերջերի նշանակումները բերված են աղյուսակ 1.1-ում:
Եռաֆազ
տրանսֆորմատորների ինչպես առաջնային, այնպես էլ երկրորդային փաթույթները միացվում
են հիմնականում աստղաձև (Y) կամ եռանկյունաձև (![]() ) սխեմաներով:
) սխեմաներով:
Աստղաձև միացման դեպքում ֆազային փաթույթների վերջերը միացնում են իրար հետ թողնելով ազատ փաթույթների սկզբները կամ միացնում են սկզբները` ազատ թողնելով փաթույթների վերջերը: Միացման ընդհանուր կետն անվանում են զրոյական կամ չեզոք կետ: Զրոյական կետի սեղմակները նշանակվում են համապատասխանաբար O, o տառերով:
Եռանկյունաձև միացման դեպքում հաջորդող ֆազային փաթույթի սկիզբը միացվում է նախորդող ֆազային փաթույթի վերջին կամ հակառակը:
Փաթույթների
միացման սխեմայի ընտրությունը կախված է մի շարք պատճառներից: Օրինակ, 35 կՎ և ավելի
լարումով ցանցերի համար ավելի շահավետ է տրանսֆորմատորի փաթույթը միացնել աստղաձև և
հողակցել զրոյական կետը, քանի որ այդ դեպքում տրանսֆորմատորի ելուստների և հաղորդման
գծերի հաղորդալարերի լարումը հողի նկատմամբ կլինի միշտ ![]() անգամ փոքր գծայինից, որը հանգեցնում
է մեկուսացման արժեքի իջեցմանը:
անգամ փոքր գծայինից, որը հանգեցնում
է մեկուսացման արժեքի իջեցմանը:
Բացի դրանից, երկրորդային փաթույթի աստղաձև միացման դեպքում, երբ բեռը խառը բնույթի է (լուսավորվածություն-ուժային), հնարավորություն է ընձեռվում տարանջատել սպառիչները` համապատասխան լարմանը (ֆազային կամ գծային) միացնելու տեսակետից:
Ինչ վերաբերում է եռանկյունաձև միացմանը, ապա այն ունի էական դրական նշանակություն, հատկապես, էլշու-ների կորերի ձևը սինուսոիդային մոտեցնելու տեսանկյունից:
Տրանսֆորմատորն այլ տրանսֆորմատորների հետ զուգահեռ աշխատանքի միացման համար կարևորագույն նշանակություն ունի առաջնային և երկրորդային փաթույթների գծային լարումների միջև ֆազային շեղումը: Այդ շեղումը բնութագրելու համար մտցվում է փաթույթի միացման խմբի հասկացությունը:
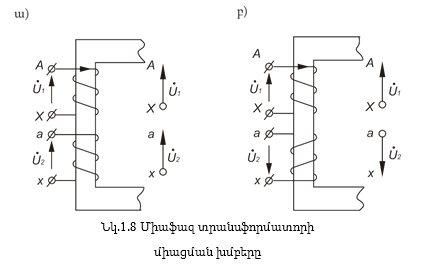
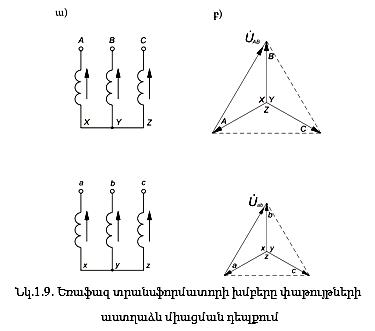
Նկ.1.8,ա-ում ցույց են տրված միաֆազ տրանսֆորմատորի փաթույթները, որոնց փաթաթման ուղղությունները համընկնում են, ընդ որում, փաթույթների սկզբները (A, a) գտնվում են վերևում, իսկ վերջերը (X, x) ներքևում: Փաթութները տեղադրված են նույն ձողի վրա:
Քանի որ փաթույթները գտնվում են նույն ձողի վրա և,
հետևաբար,
հոսքակցվում են նույն հոսքի հետ,
ապա էլշու-ները,
հետևաբար և լարումները,
ժամանակի յուրաքանչյուր պահի կգործեն միևնույն ուղղությամբ և կհամընկնեն ըստ ֆազի:
Եթե տեղերով փոխենք փաթույթներից մեկի ծայրերի նշանակումները
(սկիզբը և վերջը),
այդ փաթույթի լարման վեկտորի ուղղությունը կփոխվի հակառակ ուղղությամբ:
Այս դեպքում լարումներն իրարից շեղված կլինեն ![]() -ով:
Նույնպիսի արդյունք կստացվի,
եթե,
պահպանելով նշանակումները,
փոխենք փաթույթներից մեկի փաթաթման ուղղությունը
(նկ.1.8,բ):
-ով:
Նույնպիսի արդյունք կստացվի,
եթե,
պահպանելով նշանակումները,
փոխենք փաթույթներից մեկի փաթաթման ուղղությունը
(նկ.1.8,բ):
Տրանսֆորմատորների փաթույթների ֆազերի շեղումը նշանակելու համար նրանց գծային լարումների վեկտորները նմանեցնում են ժամացույցի ցուցատախտակի սլաքներին, ընդ որում, բարձր լարման փաթույթի վեկտորն ընդունում են որպես րոպե ցույց տվող սլաք (մեծ սլաք) և համարում, որ ժամացույցի ցուցատախտակի վրա այն ուղղված է 12 (կամ 0) թվի վրա, իսկ ցածր լարման փաթույթի վեկտորն ընդունում են որպես ժամը ցույց տվող սլաք (փոքր սլաք): Վերջինիս ցույց տված թիվը պայմանավորում է այն խումբը, որին պատկանում է տվյալ տրանսֆորմատորը:
Այսպիսով, նկ.1 8,ա դեպքում (համապատասխան վերոնշյալ նշանակումներին) փոքր սլաքը համընկնելով մեծ սլաքի հետ ուղղված կլինի 12 (կամ 0) թվի ուղղությամբ և տրանսֆորմատորի փաթույթների միացման խումբը կպայմանավորվի 12 (կամ 0) թվով, իսկ նկ. 1.8,բ դեպքում` 6 թվով:
Դիտարկենք եռաֆազ տրանսֆորմատորների փաթույթների միացման խմբերի հարցը: Կատարենք հետևյալ ենթադրությունները.
1) տրանսֆորմատորի առաջնային և երկրորդային փաթույթները միացված են աստղաձև,
2) փաթույներն ունեն միևնույն փաթաթման ուղղությունը,
3) փաթույթների ծայրերն ունեն միանման նշանակումներ:
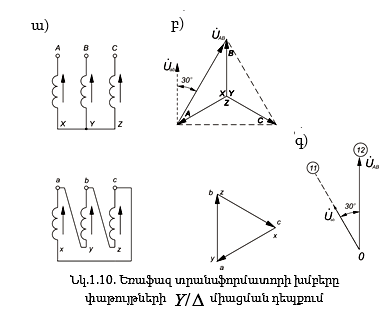
Բարձր լարման փաթույթն ընդունենք որպես առաջնային, իսկ ցածր լարման փաթույթը` երկրորդային փաթույթ: Նշենք նաև, որ նույնանուն ֆազերի փաթույթները տեղադրված են միևնույն ձողի վրա (նկ.1.9):
Դժվար չէ կռահել, որ քննարկվող դեպքում երկրորդային և առաջնային փաթույթների գծային լարումներն ըստ ֆազի համընկնում են, և տրանսֆորմատորը պատկանում է 12-րդ (կամ 0) խմբին: Համապատսախան պայմանական նշանակումն այս դեպքում տրվում է` Y/Y-12 կամ Y/Y-0 տեսքով:
Եթե փոխենք առաջնային (կամ երկրորդային) փաթույթի փաթաթման ուղղությունը, ապա այդ փաթույթի գծային լարումների եռանկյունը կշրջվի իր նախնական դիրքից 1800-ով, առաջնային և երկրորդային գծային լարումները, բնականաբար, կգտնվեն հակաֆազայում և այժմ արդեն տրանսֆորմատորի միացման խումբը կորոշվի 6 թվով: Պայմանական նշանակումը` Y/Y-6 :
Նույն 6-րդ խումբը կստանայինք, եթե անփոփոխ թողնելով փաթաթման ուղղությունը, փոխեինք առաջնային (կամ երկրորդային) փաթույթի ծայրերի նշանակումները:
Կատարելով համապատասխան փաթույթի ֆազերի ծայրերի նշանակումների շրջանաձև վերատեղադրում և փոխելով փաթույթի ծայրերի նշանակումները` Y/Y սխեմայով միացման դեպքում կարելի է ստանալ փաթույթների միացման բոլոր զույգ խմբերը:
Նույնպիսի միացման խմբեր կարելի է ստանալ նաև փաթույթների միացման սխեմայի դեպքում:
Այժմ ենթադրենք, որ փաթութները միացված են ![]() սխեմայով (նկ.1.10,ա): Ընդունենք նաև, որ փաթույթների փաթաթման ուղղությունը և ծայրերի նշանակումները համանման են: Այդ դեպքում բարձր և ցածր լարման փաթույթների լարումների վեկտորական դիագրամները կունենան նկ.1.10,բ-ում ցույց տրված տեսքը, և նույնանուն գծային լարումները իրարից շեղված կլինեն 300-ով (նկ.1.10,գ): Այդպիսի տրանսֆորմատորը պատկանում է 11-րդ
խմբին, իսկ համապատասխան պայմանական նշանակումը տրվում է
սխեմայով (նկ.1.10,ա): Ընդունենք նաև, որ փաթույթների փաթաթման ուղղությունը և ծայրերի նշանակումները համանման են: Այդ դեպքում բարձր և ցածր լարման փաթույթների լարումների վեկտորական դիագրամները կունենան նկ.1.10,բ-ում ցույց տրված տեսքը, և նույնանուն գծային լարումները իրարից շեղված կլինեն 300-ով (նկ.1.10,գ): Այդպիսի տրանսֆորմատորը պատկանում է 11-րդ
խմբին, իսկ համապատասխան պայմանական նշանակումը տրվում է ![]() տեսքով: Քննարկվող
դեպքում, ֆազերի ծայրերի նշանակումների շրջանաձև վերատեղադրման և փաթույթների ծայրերի փոփոխման միջոցով կարելի է ստանալ փաթույթների միացման բոլոր կենտ խմբերը:
տեսքով: Քննարկվող
դեպքում, ֆազերի ծայրերի նշանակումների շրջանաձև վերատեղադրման և փաթույթների ծայրերի փոփոխման միջոցով կարելի է ստանալ փաթույթների միացման բոլոր կենտ խմբերը:
![]()
1.4. Տրանսֆորմատորների լարումների և մշու-ների հավասարումները
Քննարկենք տրանսֆորմատորի աշխատանքային գործընթացն իրական միաֆազ տրանսֆորմատորի օրինակի հիման վրա:
Առաջնային և երկրորդային փաթույթներում հիմնական հոսքից ինդուկտված էլշու-ները`
![]()
Տրանսֆորմատորի
փաթույթների ![]() և
և ![]() հոսանքները, բացի հիմնական հոսքից, ստեղծում են
նաև
հոսանքները, բացի հիմնական հոսքից, ստեղծում են
նաև ![]() և
և ![]() ցրման հոսքերը, որոնք կապված են միայն իրենց
սեփական փաթույթի հետ և ինդուկցում են նրանցում, այսպես կոչված, ցրման էլշու-ներ,
ընդ որում`
ցրման հոսքերը, որոնք կապված են միայն իրենց
սեփական փաթույթի հետ և ինդուկցում են նրանցում, այսպես կոչված, ցրման էլշու-ներ,
ընդ որում`
![]()
որտեղ
![]() -ը և
-ը և ![]() -ը համապատասխանաբար առաջնային և
երկրորդային փաթույթների ցրման ինդուկտիվություններն են:
-ը համապատասխանաբար առաջնային և
երկրորդային փաթույթների ցրման ինդուկտիվություններն են:
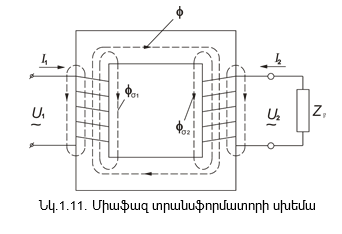
Առաջնային փաթույթի համար ըստ Կիրխհոֆի երկրորդ օրենքի կարող ենք գրել`
![]()
որտեղ ![]() -ը` առաջնային փաթույթին մատուցված լարման
ակնթարթային արժեքն է,
-ը` առաջնային փաթույթին մատուցված լարման
ակնթարթային արժեքն է, ![]() -ը`
առաջնային փաթույթում հոսանքի ակնթարթային արժեքը,
-ը`
առաջնային փաթույթում հոսանքի ակնթարթային արժեքը, ![]() -ը` առաջնային փաթույթի ակտիվ դիմադրությունը :
-ը` առաջնային փաթույթի ակտիվ դիմադրությունը :
Եթե
լարումները, էլշու-ները և հոսանքները, ժամանակից կախված, փոփոխվում են սինուսոիդալ
օրենքով, ապա այդ մեծությունների գործող արժեքները կարելի է պատկերել
կոմպլեքսներով` ![]() և
և
![]() : Այդ դեպքում, կարող ենք գրել`
: Այդ դեպքում, կարող ենք գրել`
![]()
Ցրման էլշու-ների գործող արժեքները`

որտեղ ![]() -ը և
-ը և ![]() -ը համապատասխանաբար առաջնային և
երկրորդային փաթույթների ցրման ինդուկտիվ դիմադրություններն են:
-ը համապատասխանաբար առաջնային և
երկրորդային փաթույթների ցրման ինդուկտիվ դիմադրություններն են:
Այսպիսով, տրանսֆորմատորի յուրաքանչյուր փաթույթում ինդուկտվում են երկուական
էլշու` մեկը ![]() հիմնական
հոսքից, մյուսը` համապատասխան ցրման հոսքերից:
հիմնական
հոսքից, մյուսը` համապատասխան ցրման հոսքերից:
Հաշվի առնելով (1.11)-ը, կարող ենք գրել, որ`

որտեղ
![]() - առաջնային փաթույթի լրիվ
դիմադրությունն է:
- առաջնային փաթույթի լրիվ
դիմադրությունն է:
(1.12)-ը տրանսֆորմատորի առաջնային փաթույթի լարումների հավասարումն է:
Տրանսֆորմատորի երկրորդային փաթույթի համար, որը փակված է բեռով, լարումների հավասարումը կունենա հետևյալ տեսքը`
![]()
![]() -ը
երկրորդային փաթույթի ակտիվ դիմադրությունն է: Մյուս կողմից (նկ.11)`
-ը
երկրորդային փաթույթի ակտիվ դիմադրությունն է: Մյուս կողմից (նկ.11)`
![]()
Այսպիսով`
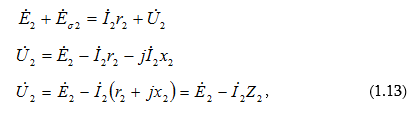
որտեղ ![]() -երկրորդային փաթույթի լրիվ
դիմադրությունն է:
-երկրորդային փաթույթի լրիվ
դիմադրությունն է:
(1.13)-ը տրանսֆորմատորի երկրորդային փաթույթի լարումների հավասարումն է:
Եթե անտեսենք տրանսֆորմատորի առաջնային փաթույթում լարման անկումը, ապա ըստ (1.12)-ի`
![]()
քանի որ`
![]()
ապա`
Այս
արտահայտությունից բխում է, որ ցանցի անփոփոխ լարման դեպքում ![]() , մագնիսական հոսքը, գործնականում,
կախված չէ բեռից: Հետևաբար, մագնիսական հոսքն անփոփոխ է և նույն արժեքն ունի
ինչպես և պարապ ընթացքի ռեժիմում, երբ պայմանավորվում է միայն առաջնային փաթույթի
մշու-ով, այնպես էլ բեռնավորման ռեժիմում, երբ պայմանավորվում է առաջնային և
երկրորդային փաթույթների մշու-ների համատեղ գործողությամբ:
, մագնիսական հոսքը, գործնականում,
կախված չէ բեռից: Հետևաբար, մագնիսական հոսքն անփոփոխ է և նույն արժեքն ունի
ինչպես և պարապ ընթացքի ռեժիմում, երբ պայմանավորվում է միայն առաջնային փաթույթի
մշու-ով, այնպես էլ բեռնավորման ռեժիմում, երբ պայմանավորվում է առաջնային և
երկրորդային փաթույթների մշու-ների համատեղ գործողությամբ:
Համաձայն վերոհիշյալի`
![]()
որտեղ ![]() առաջնային փաթույթի մշուն է,
առաջնային փաթույթի մշուն է, ![]() երկրորդային փաթույթի մշուն է,
երկրորդային փաթույթի մշուն է, ![]() պարապ ընթացքի մշուն է;
պարապ ընթացքի մշուն է; ![]() պարապ ընթացքի հոսանքը:
պարապ ընթացքի հոսանքը:
(1.14)-ը տրանսֆորմատորի մշու-ների հավասարումն է:
1.5. Բերված տրանսֆորմատոր
Ընդհանուր դեպքում, տրանսֆորմատորի առաջնային փաթույթի պարամետրերը տարբերվում են երկրորդային փաթույթի պարամետրերից: Ընդ որում, այդ տարբերությունն այնքան ավելի զգալի է, որքան մեծ է տրանսֆորմացիայի գործակիցը` k-ն: Դա դժվարացնում է հատկապես վեկտորական դիագրամների կառուցումը: Վերոհիշյալ դժվարությունները վերացնելու նպատակով տրանսֆորմատորի, սովորաբար, երկրորդային փաթույթի պարամետրերը բերում են առաջնային փաթույթի գալարների թվին (այսինքն, իրական տրանսֆորմատորի փոխարեն դիտարկում են մեկ այլ տրանսֆորմատոր, որի երկրորդային փաթույթի գալարների թիվը հավասար է առաջնային փաթույթի գալարների թվին): Բնական է, որ այդ դեպքում տրանսֆորմատորի երկրորդային փաթույթը բնութագրող բոլոր մեծությունները` էլշու-ն, լարումը, հոսանքը, դիմադրությունները պետք է վերահաշվարկվեն առաջնային փաթույթի գալարների թվի համար:
Պատկերացնենք,
որ իրական տրանսֆորմատորի երկրորդային փաթույթը, որի գալարների թիվը ![]() է, փոխարինված է վերացական (թվացյալ)
գալարների թվով փաթույթով`
է, փոխարինված է վերացական (թվացյալ)
գալարների թվով փաթույթով`![]() :
Այդ դեպքում, երկրորդային փաթույթի գալարների թիվը փոխվում է k′ անգամ,
:
Այդ դեպքում, երկրորդային փաթույթի գալարների թիվը փոխվում է k′ անգամ,
որտեղ k′-ը բերման գործակիցն է, որը ցածրացնող տրանսֆորմատորի դեպքում հավասար է տրանսֆորմացիայի գործակցին:
Այդպիսի տրանսֆորմատորը կոչվում է բերված տրանսֆորմատոր:
Սակայն տրանսֆորմատորի երկրորդային փաթույթի բերումն առաջնայինին պետք է կատարվի այնպես, որ այն չազդի տրանսֆորմատորի էներգետիկական պրոցեսի վրա, այսինքն, էլեկտրամագնիսական պրոցեսներն իրական և բերված տրոնսֆորմատորներում պետք է ընթանան միևնույն ձևով: Իսկ դա նշանակում է, որ իրական և բերված երկրորդային փաթույթների հզորություններն աշխատանքային բոլոր ռեժիմներում պետք է լինեն իրար հավասար: Բերված մեծությունները նշանակվում են նրբագծերով:
Հաշվի առնելով վերոնշվածը` դժվար չէ ապացուցել, որ բերված և իրական փաթույթների էլշու-ների, հոսանքների, դիմադրությունների միջև գոյություն ունի հետևյալ կապը`
![]()
Բերված տրանսֆորմատորի լարումների և մշու-ների հավասարումները կունենան հետևյալ տեսքը`
(1.18)-ը բերված տրանսֆորմատորի հոսանքների հավասարումն է: Ներկայացնենք հոսանքների հավասարումը հետևյալ տեսքով`
![]()
Տրանսֆորմատորի
առաջնային հոսանքը բաղկացած է երկու` ![]() բաղադրիչներից, ընդ որում, այդ
բաղադրիչներից առաջինը
բաղադրիչներից, ընդ որում, այդ
բաղադրիչներից առաջինը ![]() պայմանավորում
է տրանսֆորմատորի մագնիսամիջուկում հիմնական մագնիսական հոսքը, իսկ երկրորդի
պայմանավորում
է տրանսֆորմատորի մագնիսամիջուկում հիմնական մագնիսական հոսքը, իսկ երկրորդի ![]() ստեղծած մշու-ն, ելնելով մագնիսական հոսքի
անփոփոխության պայմանից, համակշռում է երկրորդային հոսանքի ստեղծած մշու-ին:
ստեղծած մշու-ն, ելնելով մագնիսական հոսքի
անփոփոխության պայմանից, համակշռում է երկրորդային հոսանքի ստեղծած մշու-ին:
1.6. Տրանսֆորմատորի փոխարինման սխեման
Տրանսֆորմատորի
աշխատանքի հետազոտությունը պարզեցնելու նպատակով, իրական տրանսֆորմատորը, որում
փաթույթներն իրար հետ կապված են էլեկտրամագնիսորեն, պետք է փոխարինել սխեմայով,
որտեղ պարամետրերն իրար հետ կապված են միայն էլեկտրականորեն: Բերված
տրանսֆորմատորի հասկացության ներմուծումը, որում ![]() և
և ![]() , հնարավորություն է տալիս իրականացնել այդ
փոխարինումը:
, հնարավորություն է տալիս իրականացնել այդ
փոխարինումը:
Համատեղ լուծելով (1.15), (1.16) և (1.18) հավասարումների համակարգը հոսանքի նկատմամբ, կստանանք`

որտեղ
ընդ որում`
Օգտագործվել
են հետևյալ նշանակումները. ![]() -ը
երկրորդային փաթույթի բերված ակտիվ դիմադրությունն է,
-ը
երկրորդային փաթույթի բերված ակտիվ դիմադրությունն է, ![]() -ը` երկրորդային փաթույթի բերված ցրման
ինդուկտիվ դիմադրությունը,
-ը` երկրորդային փաթույթի բերված ցրման
ինդուկտիվ դիմադրությունը, ![]() -ը`
երկրորդային փաթույթի բերված լրիվ դիմադրությունը,
-ը`
երկրորդային փաթույթի բերված լրիվ դիմադրությունը, ![]() -ը` բեռի բերված լրիվ դիմադրությունը,
-ը` բեռի բերված լրիվ դիմադրությունը, ![]() մագնիսացնող
կոնտուրի լրիվ դիմադրությունը, M-ը` փաթույթների փոխինդուկտիվությունը,
մագնիսացնող
կոնտուրի լրիվ դիմադրությունը, M-ը` փաթույթների փոխինդուկտիվությունը, ![]() մագնիսամիջուկի պողպատի կորուստները,
մագնիսամիջուկի պողպատի կորուստները, ![]() փոխարինման սխեմայի համարժեք դիմադրությունը:
փոխարինման սխեմայի համարժեք դիմադրությունը:
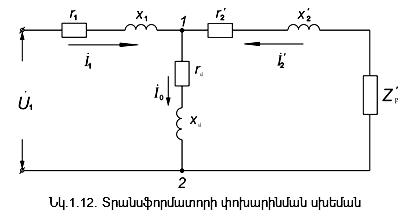
Այսպիսով,փոխարինման սխեման (նկ.1.12) բաղկացած է 3 ճյուղերից.
![]() դիմադրությամբ և
դիմադրությամբ և ![]() հոսանքով առաջնային ճյուղից,
հոսանքով առաջնային ճյուղից, ![]() դիմադրությամբ և
դիմադրությամբ և ![]() հոսանքով մագնիսացնող ճյուղից,
հոսանքով մագնիսացնող ճյուղից, ![]() դիմադրությամբ և
դիմադրությամբ և ![]() հոսանքով երկրորդային ճյուղից:
հոսանքով երկրորդային ճյուղից:
Ինչպես
երևում է այդ սխեմայից, համապատասխան ակտիվ և ցրման ինդուկտիվ դիմադրությունները
պայմանականորեն առանձնացված են փաթույթներից, իսկ վերջիններս իրենց հերթին
համատեղված և պատկերված են համարժեք ճյուղով, որով հոսում է ![]() հոսանքը: Ընդ որում, համատեղված փաթույթը
կատարում է մագնիսացնող կոնտուրի դեր, որը ստեղծում է հիմնական մագնիսական հոսքը,
իսկ այդ փաթույթում ծախսվող ակտիվ հզորությունը համապատասխանում է մագնիսամիջուկի
պողպատում կորուստներին:
հոսանքը: Ընդ որում, համատեղված փաթույթը
կատարում է մագնիսացնող կոնտուրի դեր, որը ստեղծում է հիմնական մագնիսական հոսքը,
իսկ այդ փաթույթում ծախսվող ակտիվ հզորությունը համապատասխանում է մագնիսամիջուկի
պողպատում կորուստներին:
Տրված
տրանսֆորմատորի համար փոխարինման սխեմայի բոլոր պարամետրերը (բացառությամբ ![]() -ի) հաստատուն մեծություններ են և կարող են
որոշվել համապատասխան փորձերից:
-ի) հաստատուն մեծություններ են և կարող են
որոշվել համապատասխան փորձերից:
Նշենք
նաև, որ փոխարինման սխեմայում ![]() դիմադրության
մեծության փոփոխման միջոցով կարելի է ստանալ տրանսֆորմատորի աշխատանքային բոլոր ռեժիմները:
դիմադրության
մեծության փոփոխման միջոցով կարելի է ստանալ տրանսֆորմատորի աշխատանքային բոլոր ռեժիմները:
1.7. Միաֆազ տրանսֆորմատորի պարապ ընթացքի ռեժիմը
Տրանսֆորմատորի աշխատանքի այն
ռեժիմը, երբ առաջնային փաթույթը միացված է ցանցին, իսկ երկրորդային փաթույթը բաց է
![]() , անվանում են պարապ ընթացքի ռեժիմ:
, անվանում են պարապ ընթացքի ռեժիմ:
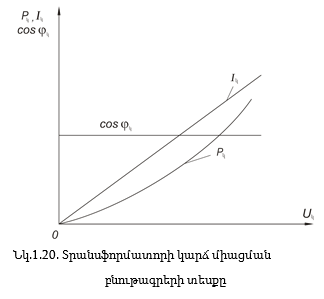
Այս ռեժիմը թույլ է տալիս հաշվարկային կամ փորձնական ճանապարհով որոշել հետևյալ մեծությունները`
- տրանսֆորմացիայի գործակիցը,
- պարապ ընթացքի հոսանքը,
- պարապ ընթացքի կորուստները:
Պարապ ընթացքի ռեժիմում բերված տրանսֆորմատորի լարումների և հոսանքների հավասարումներն ունեն հետևյալ տեսքը`
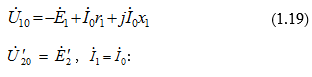
Գծենք պարապ ընթացքի ռեժիմի փոխարինման սխեման:
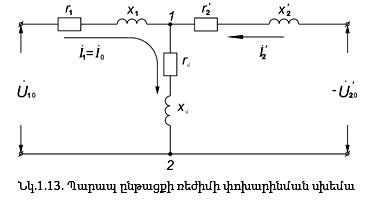
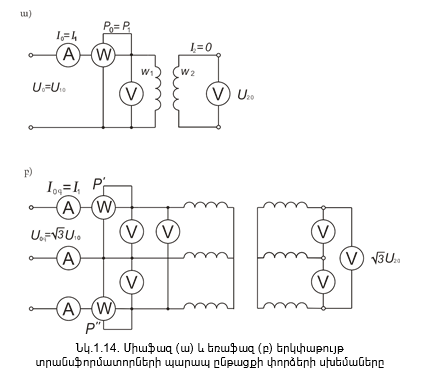
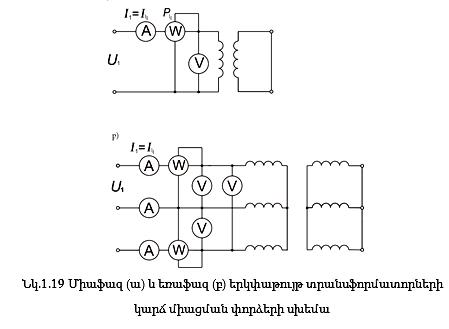
Երկփաթույթ
միաֆազ (m=1) և եռաֆազ (m=3) տրանսֆորմատորների պարապ ընթացքի
փորձերի սխեմաները բերված են նկ.1.14-ում: Տրանսֆորմատորի առաջնային փաթույթը
միացվում է սինուսոիդային լարմանը, իսկ երկրորդային փաթույթը բաց է: Չափվում են
առաջնային ![]() Չափվում են առաջնային
Չափվում են առաջնային ![]() հոսանքը և
հոսանքը և ![]() հզորությունը, ինչպես նաև
երկրորդային
հզորությունը, ինչպես նաև
երկրորդային ![]() լարումը:
լարումը:
Միաֆազ տրանսֆորմատորի փորձի տվյալներից որոշվում են պարապ ընթացքի լրիվ, ակտիվ և ինդուկտիվ դիմադրությունները`

տրանսֆորմացիայի գործակիցը`
և պարապ ընթացքի հզորության գործակիցը`
Նշենք
նաև, որ պարապ ընթացքի հոսանքն ![]() ունի
երկու` ռեակտիվ
ունի
երկու` ռեակտիվ ![]() և
ակտիվ
և
ակտիվ ![]() բաղադրիչ:
բաղադրիչ:
Այսպիսով`
![]()
Պարապ ընթացքի հոսանքի ռեակտիվ բաղադրիչը ստեղծում է հիմնական մագնիսական հոսքը, իսկ մագնիսական կորուստների հզորությունը որոշվում է պարապ ընթացքի հոսանքի ակտիվ բաղադրիչով:
Անվանական լարման դեպքում, ![]() -ն
կազմում է անվանական հոսանքի 1,5…4%-ը:
-ն
կազմում է անվանական հոսանքի 1,5…4%-ը:
Եռաֆազ
տրանսֆորմատորների համար երեք ամպերմետրերի և վոլտմետրերի ցուցմունքներով որոշվում
են ![]() գծային
հոսանքի և
գծային
հոսանքի և ![]() գծային լարման միջին արժեքները, իսկ
վատտմետրերի ցուցմունքներով` երեք ֆազերի պարապ ընթացքի
գծային լարման միջին արժեքները, իսկ
վատտմետրերի ցուցմունքներով` երեք ֆազերի պարապ ընթացքի ![]() հզորությունը: Ֆիզիկական իմաստ ունեն
միայն այն դիմադրությունների արժեքները, որոնք հաշվարկված են փաթույթի ֆազի համար:
Այդ պատճառով պետք է նկատի ունենալ փաթույթի միացման սխեման: Առաջնային փաթույթի
աստղաձև միացման դեպքում.
հզորությունը: Ֆիզիկական իմաստ ունեն
միայն այն դիմադրությունների արժեքները, որոնք հաշվարկված են փաթույթի ֆազի համար:
Այդ պատճառով պետք է նկատի ունենալ փաթույթի միացման սխեման: Առաջնային փաթույթի
աստղաձև միացման դեպքում.
Պարապ ընթացքի հզորության գործակիցը`
Պարապ
ընթացքի փորձը սովորաբար կատարվում է ![]() մի
քանի արժեքների համար, սկսած
մի
քանի արժեքների համար, սկսած ![]() մինչև
մինչև
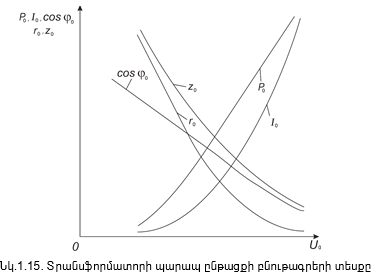
![]() և ստացված տվյալների համաձայն կառուցվում
է պարապ ընթացքի բնութագրերը`
և ստացված տվյալների համաձայն կառուցվում
է պարապ ընթացքի բնութագրերը` ![]() առնչությությունները
(նկ.1.15):
առնչությությունները
(նկ.1.15):
Տրանսֆորմատորի
պարապ ընթացքի ռեժիմի փոխարինման սխեմայի դիտարկումից բխում է, որ ![]() պարամետրերը հետևյալ դիմադրությունների
գումարներն են.
պարամետրերը հետևյալ դիմադրությունների
գումարներն են.
![]()
Ուժային տրանսֆորմատորներում
![]() դիմադրությունները բավականաչափ փոքր են
դիմադրությունները բավականաչափ փոքր են ![]() հետևաբար`
հետևաբար`
![]()
Նույն
պատճառով կարելի է ընդունել, որ պարապ ընթացքի ![]() հզորությունը հավասար է տրանսֆորմատորի մագնիսամիջուկում
մագնիսական կորուստներին:
հզորությունը հավասար է տրանսֆորմատորի մագնիսամիջուկում
մագնիսական կորուստներին:
Քանի որ
![]()
Համաձայն պարապ ընթացքի ռեժիմի համապատասխան հավասարումների` կառուցենք այդ ռեժիմին համապատասխանող վեկտորական դիագրամը (նկ.1.16):
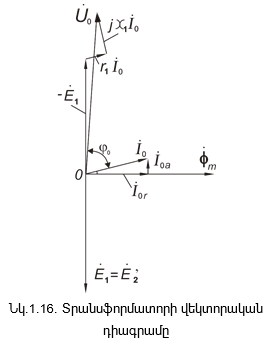
Վեկտորական
դիագրամը կառուցվում է հետևյալ կերպ: Աբսցիսների դրական ուղղությամբ տեղադրվում է ![]() վեկտորը:
վեկտորը: ![]() վեկտորը հետ է ընկած մագնիսական հոսքից 900 -ով:
Պարապ ընթացքի հոսանքի ռեակտիվ բաղադրիչը
վեկտորը հետ է ընկած մագնիսական հոսքից 900 -ով:
Պարապ ընթացքի հոսանքի ռեակտիվ բաղադրիչը ![]() համընկնում
է
համընկնում
է ![]() -ի
հետ, իսկ ակտիվ բաղադրիչը
-ի
հետ, իսկ ակտիվ բաղադրիչը ![]() առաջ
է ընկած նրանից 900-ով: լարման անկման վեկտորն ունի
առաջ
է ընկած նրանից 900-ով: լարման անկման վեկտորն ունի ![]() ուղղությունը, իսկ
ուղղությունը, իսկ ![]() վեկտորն առաջ է ընկած
վեկտորն առաջ է ընկած ![]() լարման վեկտորը կառուցվում է համաձայն
(1.19) հավասարման: Նշենք, որ
լարման վեկտորը կառուցվում է համաձայն
(1.19) հավասարման: Նշենք, որ ![]() -ն
առաջնային լարման
-ն
առաջնային լարման ![]() և
պարապ ընթացքի հոսանքի
և
պարապ ընթացքի հոսանքի ![]() վեկտորների
միջև անկյունն է:
վեկտորների
միջև անկյունն է:
1.8. Տրանսֆորմատորի պարապ ընթացքի կորուստները
Քանի որ ![]() ապա պարապ ընթացքի կորուստները
գործնականում մագնիսամիջուկի պողպատում կորուստներն են, հաշվի առած նաև բաքի
պատերում մրրկային հոսանքներից կորուստները: Այսինքն` պարապ ընթացքի հզորությունը
գործնականում ծախսվում է միայն պողպատի կորուստների վրա:
ապա պարապ ընթացքի կորուստները
գործնականում մագնիսամիջուկի պողպատում կորուստներն են, հաշվի առած նաև բաքի
պատերում մրրկային հոսանքներից կորուստները: Այսինքն` պարապ ընթացքի հզորությունը
գործնականում ծախսվում է միայն պողպատի կորուստների վրա:
Նշենք
նաև, որ պողպատում կորուստները բաղկացած են հիստերեզիսային ![]() և մրրկային
և մրրկային ![]() հոսանքների կորուստներից`
հոսանքների կորուստներից`
![]()
Ընդհանուր
առմամբ, պողպատում կորուստները համեմատական են ինդուկցիայի քառակուսուն ![]() և հաճախության 1,3 աստիճանին
և հաճախության 1,3 աստիճանին ![]()
1.9. Տրանսֆորմատորի կարճ միացման ռեժիմը
Տրանսֆորմատորի
կարճ միացումը նրա աշխատանքի այն ռեժիմն է, երբ տրանսֆորմատորի երկրորդային
փաթույթը փակված է իր վրա և, հետևաբար, ![]() :
Եթե տրանսֆորմատորի կարճ միացման դեպքում նրա առաջնային փաթույթին մատուցվում է
անվանական կամ անվանականին մոտ լարում, ապա տրանսֆորմատորի փաթույթներում կարճ
միացման հոսանքները 10…20 անգամ կգերազանցեն անվանական հոսանքների
արժեքները, և տրանսֆորմատորը կարող է շարքից դուրս գալ: Այսպիսի կարճ միացումն
անվանում են վթարային կարճ միացում: Տրանսֆորմատորի կարճ միացման մյուս տեսակը նրա
փորձարկումն է կարճ միացման ռեժիմում (լաբորատոր կարճ միացում): Այն կատարվում է
ցածրացված լարման դեպքում և նպատակ ունի որոշելու`
:
Եթե տրանսֆորմատորի կարճ միացման դեպքում նրա առաջնային փաթույթին մատուցվում է
անվանական կամ անվանականին մոտ լարում, ապա տրանսֆորմատորի փաթույթներում կարճ
միացման հոսանքները 10…20 անգամ կգերազանցեն անվանական հոսանքների
արժեքները, և տրանսֆորմատորը կարող է շարքից դուրս գալ: Այսպիսի կարճ միացումն
անվանում են վթարային կարճ միացում: Տրանսֆորմատորի կարճ միացման մյուս տեսակը նրա
փորձարկումն է կարճ միացման ռեժիմում (լաբորատոր կարճ միացում): Այն կատարվում է
ցածրացված լարման դեպքում և նպատակ ունի որոշելու`
- կարճ միացման լարումը,
- կարճ միացման կորուստները (հզորությունը):
Ենթադրենք,
որ կարճ միացման դեպքում մենք այնքան ենք իջեցրել լարումը, որ տրանսֆորմատորի
փաթույթներով անցնում են անվանական հոսանքներ: Այդ լարումը ![]() անվանում են կարճ միացման անվանական
լարում (կամ կարճ միացման լարում) և արտահայտում են տոկոսներով անվանական լարման
անվանում են կարճ միացման անվանական
լարում (կամ կարճ միացման լարում) և արտահայտում են տոկոսներով անվանական լարման ![]() նկատմամբ`
նկատմամբ`
Սովորաբար,
![]() -ն կազմում է
-ն կազմում է ![]() -ի 5-10%-ը: Կարճ միացման լարման
մեծությունը նշվում է տրանսֆորմատորի վահանակի վրա:
-ի 5-10%-ը: Կարճ միացման լարման
մեծությունը նշվում է տրանսֆորմատորի վահանակի վրա:
Կարճ միացման ռեժիմի դեպքում բերված տրանսֆորմատորի լարումների և հոսանքների հավասարումներն ընդունում են հետևյալ տեսքը`
(1.32)-ի
մեկնաբանությունը հետևյալն է. քանի որ ![]() -ն
կազմում է
-ն
կազմում է ![]() -ի
5…10%-ը, ապա տրանսֆորմատորի միջուկում հիմնական մագնիսական հոսքը և նրա ստեղծման
համար անհրաժեշտ մշու-ն
-ի
5…10%-ը, ապա տրանսֆորմատորի միջուկում հիմնական մագնիսական հոսքը և նրա ստեղծման
համար անհրաժեշտ մշու-ն ![]() այնքան
փոքր են, որ դրանք կարելի է անտեսել:
այնքան
փոքր են, որ դրանք կարելի է անտեսել:
Կարճ միացման ռեժիմի փոխարինման սխեման ունի հետևյալ տեսքը.
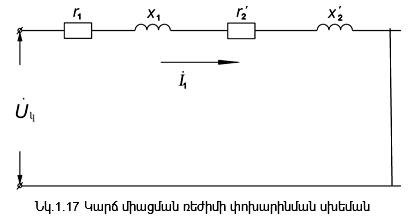
Կարճ միացման պարամետրերը`
![]()
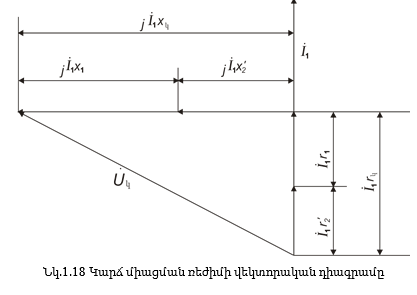
Նկ. 1.17-ի փոխարինման սխեման թույլ է տալիս կառուցել կարճ միացման ռեժիմի վեկտորական դիագրամը (նկ. 1.18):
Նախ կառուցում են ![]() վեկտորը,
որն ուղղում են օրդինատների առանցքի դրական ուղղությամբ, որից հետո կառուցում են
լարման անկումները
վեկտորը,
որն ուղղում են օրդինատների առանցքի դրական ուղղությամբ, որից հետո կառուցում են
լարման անկումները ![]() ընդ որում լարման անկումներն
ակտիվ դիմադրությունների վրա
ընդ որում լարման անկումներն
ակտիվ դիմադրությունների վրա ![]() համընկնում են վեկտորի
ուղղության հետ, իսկ
համընկնում են վեկտորի
ուղղության հետ, իսկ ![]() լարման անկումներն առաջ
են ընկած վեկտորից 900-ով:
լարման անկումներն առաջ
են ընկած վեկտորից 900-ով:
Կարճ միացման լարումը որոշվում է ըստ հետևյալ հավասարման`
![]()
Նկատի ունենալով (1.33) հավասարումները կարող ենք գրել, որ`
![]()
որտեղ ![]() կարճ միացման լարման ակտիվ և ռեակտիվ
բաղադրիչներն են:
կարճ միացման լարման ակտիվ և ռեակտիվ
բաղադրիչներն են:
Կարճ միացման փորձը կատարվում է հետևյալ կերպ: Երկրորդային փաթույթը կարճ է միացվում, իսկ առաջնային փաթույթին մատուցվում է այնպիսի իջեցված լարում, որ հոսանքները գտնվեն անվանականի սահմաններում:
Միաֆազ տրանսֆորմատորի համար`

Եռաֆազ
տրանսֆորմատորի համար, ըստ սարքերի ցուցմունքների, որոշվում են ![]() գծային
լարման,
գծային
լարման, ![]() գծային հոսանքի միջին արժեքները և կարճ
միացման երեք ֆազերի
գծային հոսանքի միջին արժեքները և կարճ
միացման երեք ֆազերի ![]() հզորությունը:
Առաջնային փաթույթի աստղաձև միացման դեպքում կարճ միացման պարամետրերը մեկ ֆազի
համար կլինեն`
հզորությունը:
Առաջնային փաթույթի աստղաձև միացման դեպքում կարճ միացման պարամետրերը մեկ ֆազի
համար կլինեն`

Քանի որ ![]() որոշվում
են օդով փակվող հոսքերով, ապա դրանց մեծությունները, ինչպես նաև
որոշվում
են օդով փակվող հոսքերով, ապա դրանց մեծությունները, ինչպես նաև ![]() գործնականում,
կախված չեն
գործնականում,
կախված չեն ![]()
Կարճ միացման բնութագրերն ունեն հետևյալ տեսքը.
1.10. Կարճ միացման կորուստները
Քանի որ
կարճ միացման ռեժիմի ժամանակ հիմնական հոսքը բավականաչափ փոքր է, ապա այդ դեպքում
միջուկում պողպատի կորուստները կարելի է անտեսել, ընդունելով, որ կարճ միացման ![]() հզորությունը
ծախսվում է միայն փաթույթներում էլեկտրական կորուստների վրա`
հզորությունը
ծախսվում է միայն փաթույթներում էլեկտրական կորուստների վրա`
![]()
Նշենք
նաև, որ ![]() հարաբերությունը
ստանդարտ տրանսֆորմատորների համար տատանվում է`
հարաբերությունը
ստանդարտ տրանսֆորմատորների համար տատանվում է` ![]() սահմաններում:
սահմաններում:
1.11. Եռաֆազ տրանսֆորմատորի կարճ միացումը
Այստեղ նկատի է առնվում միայն եռաֆազ կամ այսպես կոչված սիմետրիկ կարճ միացման դեպքը, երբ կարճ են փակվում տրանսֆորմատորի բոլոր երեք ֆազերը:
Այս դեպքում, համեմատած միաֆազ տրանսֆորմատորների կարճ միացման հետ, առանձնահատկություններ չկան:
Դա բացատրվում է նրանով, որ կարճ միացման ժամանակ (ի տարբերություն պարապ ընթացքի) պողպատը հագեցած չէ, և հոսանքներն ու հզորությունները սիմետրիկ են բաշխվում ֆազերի միջև:
Այսպիսով, միաֆազ տրանսֆորմատորների կարճ միացման համար ասվածը կարելի է տարածել եռաֆազ տրանսֆորմատորների կարճ միացման վրա:
Նշենք միայն, որ հաշվարկները կատարվում են մեկ ֆազի համար:
1.12. Տրանսֆորմատորի աշխատանքը բեռի տակ
Բեռի տակ տրանսֆորմատորի աշխատանքի վերլուծման ժամանակ նկատի
կունենանք միաֆազ տրանսֆորմատոր կամ եռաֆազ տրանսֆորմատոր սիմետրիկ բեռով, որի
դեպքում կարելի է դիտարկել տրանսֆորմատորի մեկ ֆազը: Ընդունենք, որ առաջնային լարումը`
![]() և հաճախությունը`
և հաճախությունը` ![]()
Գրենք բերված տրանսֆորմատորի լարումների և հոսանքների հավասարումները`
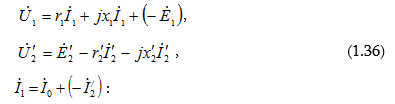
Նկ.1.21,ա-ում
պատկերված է տրանսֆորմատորի վեկտորական դիագրամն ակտիվ-ինդուկտիվ բեռնվածքի
համար: ![]() էլշու-ն հետ է ընկած մագնիսալարի
էլշու-ն հետ է ընկած մագնիսալարի ![]() հոսքից
900-ով,
հոսքից
900-ով, ![]() հոսանքը
հոսանքը
![]() -ից հետ է մնում որոշ
-ից հետ է մնում որոշ ![]() անկյունով,
որի մեծությունը որոշվում է բեռի բնույթով: Հանելով
անկյունով,
որի մեծությունը որոշվում է բեռի բնույթով: Հանելով ![]() -ից
-ից
![]() լարման անկումը (ուղղահայաց
լարման անկումը (ուղղահայաց ![]() (զուգահեռ
(զուգահեռ
![]() -ին), կստանանք երկրորդային լարման
-ին), կստանանք երկրորդային լարման ![]() վեկտորը:
վեկտորը:
Պարապ
ընթացքի հոսանքի ռեակտիվ ![]() բաղադրիչը
համընկնում է ըստ ֆազի
բաղադրիչը
համընկնում է ըստ ֆազի ![]() -ի
հետ, իսկ նրա ակտիվ բաղադրիչն առաջ է ընկած
-ի
հետ, իսկ նրա ակտիվ բաղադրիչն առաջ է ընկած ![]() -ից
900-ով: Այդ պատճառով
-ից
900-ով: Այդ պատճառով ![]() հոսանքը
փոքր - ինչ առաջ է ընկնում
հոսանքը
փոքր - ինչ առաջ է ընկնում ![]() -ից:
Գումարելով
-ից:
Գումարելով ![]() վեկտորը` կգտնենք առաջնային հոսանքի
վեկտորը` կգտնենք առաջնային հոսանքի ![]() վեկտորը:
վեկտորը:
Առաջնային
![]() լարման վեկտորը գտնելու համար անհրաժեշտ է
կառուցել
լարման վեկտորը գտնելու համար անհրաժեշտ է
կառուցել ![]() վեկտորը` մեծությամբ հավասար և
ուղղությամբ հակառակ
վեկտորը` մեծությամբ հավասար և
ուղղությամբ հակառակ ![]() վեկտորին,
և գումարել դրան
վեկտորին,
և գումարել դրան ![]() և
և ![]() լարման
անկումները:
լարման
անկումները:
1.21, բ
նկարում համանման ձևով կառուցված է վեկտորական դիագրամը խառն ակտիվ-ունակային
բեռնվածության դեպքի համար, երբ ![]() հոսանքի
վեկտորն առաջ է ընկած
հոսանքի
վեկտորն առաջ է ընկած![]() և
և
![]() վեկտորներից` համապատասխանաբար
վեկտորներից` համապատասխանաբար ![]() և
և ![]() անկյուններով:
անկյուններով:
![]() -ը առաջնային փաթույթի լարման
-ը առաջնային փաթույթի լարման ![]() և հոսանքի
և հոսանքի ![]() վեկտորների
միջև անկյունն է:
վեկտորների
միջև անկյունն է:
1.13. Տրանսֆորմատորի էներգետիկ դիագրամը
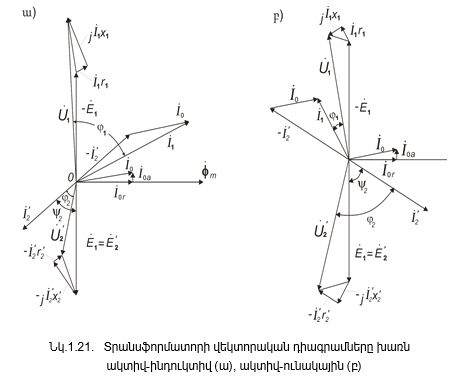
Տրանսֆորմատորի ակտիվ հզորության փոխակերպումը կատարվում է նկ.1. 22, ա-ի դիագրամի համաձայն:
Առաջնային փաթույթը սնող ցանցից սպառում է ակտիվ հզորություն`
![]()
Այդ հզորության մի մասը ծախսվում է առաջնային փաթույթի էլեկտրական կորուստների վրա`
![]() ,
,
մի մասը ծախսվում է մագնիսամիջուկում մագնիսական կորուստների վրա`
![]()
Նշենք նաև, որ մագնիսական կորուստները, գործնականում, բեռից կախված չեն, որի պատճառով դրանք կոչվում են հաստատուն կորուստներ: Էլեկտրական կորուստները, որոնք, բնականաբար, կախված են բեռի մեծությունից, կոչվում են փոփոխական կորուստներ:
Էլեկտրամագնիսական հզորությունը`
![]()
փոխանցվում է մագնիսական դաշտով երկրորդային փաթույթին: Երկրորդային փաթույթում էլեկտրական կորուստները `
![]()
Հզորության մնացորդն օգտակար հզորությունն է, որը հաղորդվում է սպառիչներին`
![]()
Ռեակտիվ հզորության փոխակերպումը կատարվում է նկ.1.22,բ դիագրամի համաձայն: Առաջնային ռեակտիվ`
![]()
հզորությունից`
![]()
հզորությունը ծախսվում է առաջնային ցրման մագնիսական դաշտի ստեղծման և`
![]()
հզորությունը` մագնիսամիջուկի մագնիսական դաշտի ստեղծման վրա:
Երկրորդային ցրման մագնիսական դաշտի ստեղծման համար անհրաժեշտ հզորությունը`
![]() :
:
Մնացած ռեակտիվ հզորությունը`
![]()
փոխանցվում է սպառիչներին:
1.14. Տրանսֆորմատորի երկրորդային լարման փոփոխությունը
Բեռի փոփոխման ժամանակ տրանսֆորմատորի երկրորդային լարումը փոփոխվում է:
Տրանսֆորմատորի
երկրորդային փաթույթի լարման փոփոխությունը` պարապ ընթացքի ժամանակ երկրորդային
անվանական լարման և երկրորդային անվանական հոսանքի դեպքում նույն սեղմակների վրա
գործող լարման տարբերությունն է, երբ ![]() Սովորաբար,
այն արտահայտում են տոկոսներով` երկրորդային անվանական լարման նկատմամբ`
Սովորաբար,
այն արտահայտում են տոկոսներով` երկրորդային անվանական լարման նկատմամբ`
![]()
Լարման փոփոխությունն անվանական բեռի դեպքում բավականին մեծ ճշտությամբ կարելի է որոշել հետևյալ բանաձևով`
![]()
Ցանկացած այլ բեռի համար`
![]()
որտեղ ![]() տրանսֆորմատորի բեռնավորման գործակիցն է:
տրանսֆորմատորի բեռնավորման գործակիցն է:
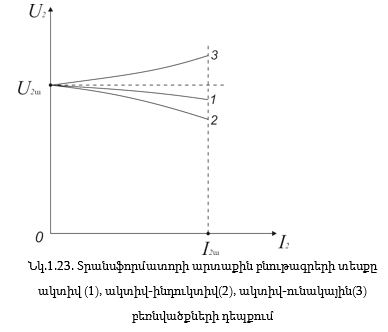
![]() կախվածությունը, երբ
կախվածությունը, երբ ![]() կոչվում է տրանսֆորմատորի արտաքին բնութագիր:
կոչվում է տրանսֆորմատորի արտաքին բնութագիր:
Արտաքին բնութագրերը տարբեր բնույթի բեռնվածքների դեպքում տրված են նկ.1.23-ում:
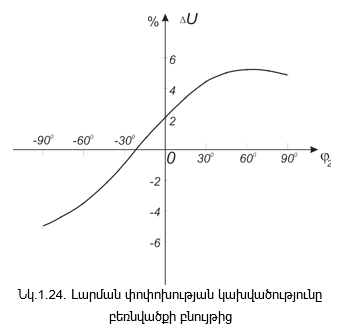
![]() -ի
կապը տրանսֆորմատորի բեռնվածքի բնույթից պարզաբանելու համար նկ.1.24-ում
կառուցված է
-ի
կապը տրանսֆորմատորի բեռնվածքի բնույթից պարզաբանելու համար նկ.1.24-ում
կառուցված է ![]() կախվածության գրաֆիկը, երբ`
կախվածության գրաֆիկը, երբ` ![]()
Աջ քառորդը համապատասխանում է խառն ակտիվ-ինդուկտիվ, իսկ ձախը` ակտիվ-ունակային բեռնվածքին:
1.15. Տրանսֆորմատորի լարման կարգավորումը
Էլեկտրահաղորդման գծերի տարբեր կետերում միացված տրանսֆորմատորների առաջնային փաթույթների լարումները տարբերվում են միմյանցից և, որպես կանոն, տարբերվում են առաջնային անվանական լարման արժեքից: Վերոհիշյալի, ինչպես նաև սպառիչների բեռնվածքների տատանումների հետևանքով առաջանում են տրանսֆորմատորի երկրորդային լարման տատանումներ: Այդ պատճառով անհրաժեշտություն է առաջանում կարգավորել տրանսֆորմատորի երկրորդային լարումը, որը սովորաբար իրականացվում է տրանսֆորմացիայի գործակցի փոփոխման միջոցով: Այդ նպատակով փաթույթները կատարվում են մի շարք ճյուղավորումներով, իսկ ճյուղավորումների փոխարկումն իրագործվում է համապատասխան փոխանջատիչների միջոցով: Ընդ որում, փաթույթի ճյուղավորումների փոխարկումը կարող է կատարվել ցանցից տրանսֆորմատորի ինչպես անջատված, այնպես էլ միացված վիճակում:
Առաջին դեպքում փոխարկող սարքը ստացվում է պարզ և էժան, սակայն փոխարկումը կապված է սպառիչների էներգամատակարարման ընդհատման հետ:
Երկրորդ դեպքում փոխարկող սարքը ստացվում է, համեմատաբար, բարդ և թանկ, սակայն սպառիչների էներգամատակարարումը չի ընդհատվում:
Տրանսֆորմատորի
լարման կարգավորումը կատարվում է անվանական լարման նկատմամբ ![]() -ի սահմաններում:
-ի սահմաններում:
Ճյուղավորումը նպատակահարմար է կատարել բարձր լարման փաթույթի կողմից քանի որ`
1) բարձր
լարման փաթույթն ունի ավելի մեծ թվով գալարներ և ![]() կարգավորման
սահմաններում գալարների ընտրումը կարելի է անել ավելի մեծ ճշտությամբ,
կարգավորման
սահմաններում գալարների ընտրումը կարելի է անել ավելի մեծ ճշտությամբ,
2) բարձր լարման փաթույթի հոսանքն ավելի փոքր է, և փոխանջատիչը ստացվում է ավելի համապարփակ:
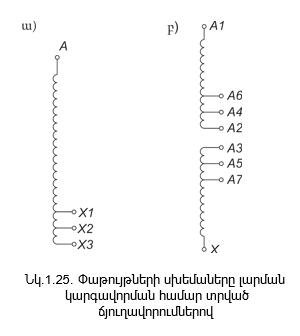
Ճյուղավորումներն արվում են յուրաքանչյուր ֆազում` զրո կետի մոտակայքում կամ փաթույթի միջնամասում:
Առաջին
դեպքում յուրաքանչյուր ֆազ ունենում է երեք ճյուղավորում (նկ. 1.25, ա), ընդ
որում, միջնամասի ճյուղավորումը համապատասխանում է տրանսֆորմատորի աշխատանքային
նորմալ ռեժիմին, իսկ մյուս երկուսը նախատեսված են լարման կարգավորումը ![]() -ի սահմաններում իրականացնելու համար:
Երկրորդ դեպքում փաթույթը բաժանում են երկու մասի, որոնցից դուրս են հանում վեց
ճյուղավորումներ (նկ.1.25, բ): Դա հնարավորություն է տալիս լարման կարգավորումն
իրագործել և
-ի սահմաններում իրականացնելու համար:
Երկրորդ դեպքում փաթույթը բաժանում են երկու մասի, որոնցից դուրս են հանում վեց
ճյուղավորումներ (նկ.1.25, բ): Դա հնարավորություն է տալիս լարման կարգավորումն
իրագործել և ![]() -ի սահմաններում:
-ի սահմաններում:
Նկ.1.25, ա սխեմայում օգտագործվում է ընդհանուր փոխարկիչ երեք ֆազերի համար (նկ.1.26, ա), իսկ նկ.1.26, բ սխեմայի դեպքում ամեն մի ֆազն ունի իր փոխարկիչը (նկ.1.26, բ):

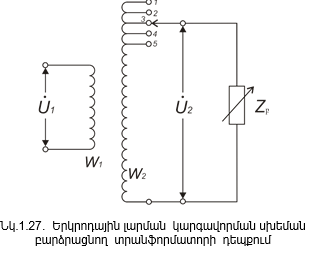
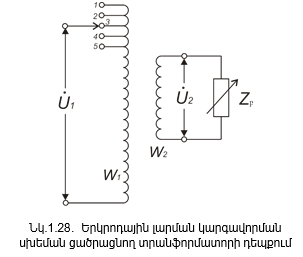
Նկ.1.27 և
նկ.1.28-ում, որպես օրինակ, պատկերված են համապատասխանաբար բարձրացնող և ցածրացնող
տրանսֆորմատորների երկրորդային լարման կարգավորման սխեմաները բեռի (ակտիվ, ակտիվ-ինդուկտիվ)
փոփոխման դեպքում ![]()
Եթե անտեսենք փաթույթներում լարման անկումները, ապա
առաջնային լարումը`
![]()
որտեղից
Երկրրդային լարումը`
![]()
(1.42)-ից հետևում է, որ նկ. 1.27-ում բեռի
մեծացման դեպքում (![]() պայմանն ապահովելու
նպատակով) անհրաժեշտ է մեծացնել երկրորդային փաթույթի գալարների թիվը` փոխարկելով
ճյուղավորումը երրորդ դիրքից` երկրորդ կամ առաջին դիրք:
պայմանն ապահովելու
նպատակով) անհրաժեշտ է մեծացնել երկրորդային փաթույթի գալարների թիվը` փոխարկելով
ճյուղավորումը երրորդ դիրքից` երկրորդ կամ առաջին դիրք:
Բեռի փոքրացման դեպքում, սպառիչի համապատասխան սեղմակը միացվում է չորրորդ կամ հինգերորդ ճյուղավոր մասը:
Նկ.1.28-ում լարման կարգավորումը կատարվում է
առաջնային փաթույթի կողմից, հետևաբար բեռի մեծացման դեպքում (![]() պայմանն
ապահովելու նպատակով) անհրաժեշտ է մեծացնել
պայմանն
ապահովելու նպատակով) անհրաժեշտ է մեծացնել ![]() Համաձայն (1.41)-ի` դա
հնարավոր է իրականացնել առաջնային փաթույթի գալարների թվի փաքրացման միջոցով`
փոխարկելով ճյուղավորումը երրորդ դիրքից չորրորդ կամ հինգերորդ դիրքերին:
Համաձայն (1.41)-ի` դա
հնարավոր է իրականացնել առաջնային փաթույթի գալարների թվի փաքրացման միջոցով`
փոխարկելով ճյուղավորումը երրորդ դիրքից չորրորդ կամ հինգերորդ դիրքերին:
Բեռի փոքրացման դեպքում ցանցի համապատասխան սեղմակը միացվում է երկրորդ կամ առաջին ճյուղավորումներին:
1.16. Տրանսֆորմատորի օգտակար գործողության գործակիցը
Տրանսֆորմատորի օգտակար գործողության գործակիցը (օ.գ.գ.)`
 ,
,
որտեղ
![]() -ը տրանսֆորմատորին մատուցված
ակտիվ հզորությունն է,
-ը տրանսֆորմատորին մատուցված
ակտիվ հզորությունն է, ![]() -ը տրանսֆորմատորից վերցված ակտիվ հզորությունը (օգտակար
հզորություն),
-ը տրանսֆորմատորից վերցված ակտիվ հզորությունը (օգտակար
հզորություն), ![]() -ն տրանսֆորմատորում` գումարային
կորուստները:
-ն տրանսֆորմատորում` գումարային
կորուստները:
Ակտիվ հզորության կորուստները տրանսֆորմատորում ստորաբաժանվում են. ա) փաթույթներում` էլեկտրական կորուստների, բ) մագնիսամիջուկում` մագնիսական կորուստների: Բացի այդ, առաջանում են լրացուցիչ կորուստներ ցրման դաշտերից` բաքի պատերում և ամրացնող դետալներում: Քանի որ այդ կորուստները համեմատական են հոսանքի քառակուսուն, ապա դրանք նույնպես վերաբերում են էլեկտրական կորուստներին: կարճ միացման ակտիվ դիմադրության փորձնական արժեքը հաշվի է առնում նաև այդ լրացուցիչ կորուստները:
Կորուստների մեծությունները որոշվում են հաշվարկային ճանապարհով` տրանսֆորմատորի նախագծման ժամանակ, կամ էլ փորձնական ճանապարհով` պատրաստի տրանսֆորմատորում:
Տրամսֆորմատորի
հոսքը, երբ ![]() բեռի փոփոխման հետ որոշ չափով
փոփոխվում է, որի հետևանքով փոփոխվում են նաև մագնիսական կորուստները: Բայց այդ
փոփոխությունները համեմատաբար մեծ չեն, և այդ պատճառով
բեռի փոփոխման հետ որոշ չափով
փոփոխվում է, որի հետևանքով փոփոխվում են նաև մագնիսական կորուստները: Բայց այդ
փոփոխությունները համեմատաբար մեծ չեն, և այդ պատճառով ![]() դեպքում մագնիսական
կորուստները բոլոր բեռնվածությունների համար ընդունվում են հավասար պարապ ընթացքի
դեպքում մագնիսական
կորուստները բոլոր բեռնվածությունների համար ընդունվում են հավասար պարապ ընթացքի ![]() հզորությանը:
հզորությանը:
Էլեկտրական
![]() կորուստները անվանական հոսանքի
դեպքում ընդունում են հավասար կարճ միացման
կորուստները անվանական հոսանքի
դեպքում ընդունում են հավասար կարճ միացման ![]() հզորությանը:
հզորությանը:
Անվանականից
տարբեր հոսանքների դեպքում, էլեկտրական կորուստներն ընդունվում են հավասար ![]() :
:
Այսպիսով, տրանսֆորմատորի գումարային կորուստները`
![]()
Տրանսֆորմատորի օգտակար հզորությունը`
![]()
որտեղ
![]() - ը տրանսֆորմատորի լրիվ անվանական
հզորությունն է:
- ը տրանսֆորմատորի լրիվ անվանական
հզորությունն է:
Օգտակար գործողության գործակիցը`
![]()
կամ`

Տրված
![]() -ի դեպքում միակ փոփոխական
մեծությունը (1.43) բանաձևում
-ի դեպքում միակ փոփոխական
մեծությունը (1.43) բանաձևում ![]() բեռնավորման գործակիցն է:
բեռնավորման գործակիցն է:
Հետևաբար,
օ.գ.գ.-ի առավելագույն արժեքը որոշելու համար անհրաժեշտ է ![]() -ի ածանցյալն ըստ
-ի ածանցյալն ըստ ![]() - ի
հավասարեցնել զրոյի`
- ի
հավասարեցնել զրոյի`

Կատարելով այս գործողությունը` ստանում ենք, որ

կամ
![]()
Այսինքն, տր անսֆորմատորի օ.գ.գ.-ն ընդունում է իր առավելագույն արժեքն այնպիսի բեռնվածքի դեպքում, որի ժամանակ փոփոխական կորուստները հավասարվում են հաստատուն կորուստներին:
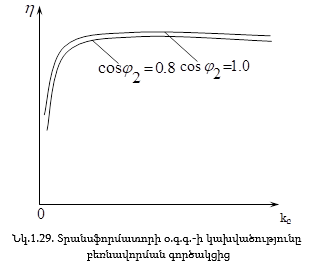
Օ.գ.գ.-ի
կախվածությունը բեռնվածության գործակցից, երբ ![]() ունի հետևյալ տեսքը (նկ.1.29):
ունի հետևյալ տեսքը (նկ.1.29):
1.17. Տրանսֆորմատորների զուգահեռ աշխատանքը
Զուգահեռ աշխատանքի պայմանները
Տրանսֆորմատորային ենթակայաններում, սովորաբար, ենթակայանի հզորությունից կախված, տեղադրվում են երկու, երեք կամ ավելի զուգահեռ աշխատող տրանսֆորմատորներ: Տրանսֆորմատորների զուգահեռ աշխատանքն անհրաժեշտ է` 1) սպառիչների էլեկտրամատակարարման մեջ ռեզերվի ապահովումը` վթարի և տրանսֆորմատորների վերանորոգման անհրաժեշտության դեպքում, 2) էներգիայի կորուստների փոքրացումը` ենթակայանի փոքր բեռնվածությունների դեպքում զուգահեռ աշխատող տրանսֆորմատորների մի մասի անջատման ճանապարհով:
Տրանսֆորմատորների
զուգահեռ աշխատանքի ամենալավ պայմաններին հասնելու համար անհրաժեշտ է, որպեսզի
զուգահեռ աշխատող տրանսֆորմատորներն ունենան` 1) փաթույթների միևնույն միացման
խմբեր, 2) հավասար առաջնային և երկրորդային անվանական լարումներ կամ, որ միևնույնն
է, հավասար տրանսֆորմացիայի գործակիցներ, 3) հավասար կարճ միացման լարման ակտիվ և
ռեակտիվ բաղադրիչներ կամ, որ նույնն է` հավասար կարճ միացման լարումներ: Եթե այդ
պայմաններից առաջին երկուսն ապահովված են, ապա զուգահեռ միացված տրանսֆորմատորների
համապատասխան ֆազերի երկրորդային լարումները պարապ ընթացքի ռեժիմում հավասար
կլինեն ըստ մեծության (համաձայն երկրորդ պայմանի) և կհամընկնեն ըստ ֆազի (համաձայն
առաջին պայմանի): Այդ պատճառով, երբ երկրորդային փաթույթները միացվեն ընդհանուր
գծերին, (բեռնվածքի բացակայության դեպքում) այդ փաթույթներում հոսանքներ չեն
առաջանա: Հակառակ դեպքում, արդեն պարապ ընթացքի ժամանակ տրանսֆորմատորների
երկրորդային փաթույթների կոնտուրում կառաջանա փաթույթների էլշու-ների
տարբերություն` ![]() որի ազդեցության տակ այդ
փաթույթներում կհոսի
որի ազդեցության տակ այդ
փաթույթներում կհոսի ![]() հավասարեցնող հոսանքը: Վերջինս, սպառիչների միացման դեպքում,
գումարվելով բեռնվածության հոսանքների հետ, կառաջացնի անհավասարաչափ
բեռնվածություն, ինչպես նաև ավելորդ կորուստներ և տրանսֆորմատորների ավելորդ
տաքացում:
հավասարեցնող հոսանքը: Վերջինս, սպառիչների միացման դեպքում,
գումարվելով բեռնվածության հոսանքների հետ, կառաջացնի անհավասարաչափ
բեռնվածություն, ինչպես նաև ավելորդ կորուստներ և տրանսֆորմատորների ավելորդ
տաքացում:
Նշված պայմաններից երրորդի պահպանումն ապահովում է տրանսֆորմատորների միջև բեռնվածության հավասարաչափ բաշխումը:
Քննարկենք վերը նշված պայմաններից շեղումների ազդեցությունը տրանսֆորմատորների զուգահեռ աշխատանքի վրա:
Պարզության համար տրանսֆորմատորների մագնիսացնող հոսանքն անտեսվում է:
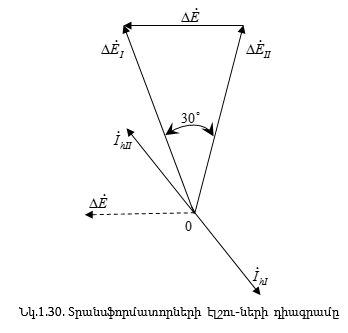
Փաթույթների
միացման խմբերի միատեսակ լինելու պայմանը: Ենթադրենք` զուգահեռ աշխատանքի են
միացված երկու տրանսֆորմատորներ` փաթույթների ![]() և
և ![]() միացումով (մյուս պայմանները բավարարված են): Այդ դեպքում
տրանսֆորմատորների համապատասխան ֆազերի երկրորդային էլշու-ները կլինեն հավասար ըստ
մեծության
միացումով (մյուս պայմանները բավարարված են): Այդ դեպքում
տրանսֆորմատորների համապատասխան ֆազերի երկրորդային էլշու-ները կլինեն հավասար ըստ
մեծության ![]() իսկ ըստ ֆազի իրարից շեղված կլինեն 300-ով
(նկ.1.30):
իսկ ըստ ֆազի իրարից շեղված կլինեն 300-ով
(նկ.1.30):
Երկրորդային փաթույթների փակ կոնտուրում գործող էլշու-ների տարբերությունը`
![]()
![]() ազդեցության տակ առաջացող հավասարեցնող
հոսանքն անցնում է տրանսֆորմատորների առաջնային և երկրորդային փաթույթներով և
սահմանափակվում է` ըստ մեծության, միայն այդ փաթույթների` այսինքն` կարճ միացման լրիվ
դիմադրություններով:
ազդեցության տակ առաջացող հավասարեցնող
հոսանքն անցնում է տրանսֆորմատորների առաջնային և երկրորդային փաթույթներով և
սահմանափակվում է` ըստ մեծության, միայն այդ փաթույթների` այսինքն` կարճ միացման լրիվ
դիմադրություններով:
Այդ պատճառով`

Նշենք
նաև, որ ![]() էլշու-ն համաչափելի է փաթույթների ֆազային
լարումների հետ, որի պատճառով էլ հավասարեցնող հոսանքը կարող է մի քանի անգամ
գերազանցել անվանական հոսանքի արժեքը:
էլշու-ն համաչափելի է փաթույթների ֆազային
լարումների հետ, որի պատճառով էլ հավասարեցնող հոսանքը կարող է մի քանի անգամ
գերազանցել անվանական հոսանքի արժեքը:
Ուստի, տրանսֆորմատորների զուգահեռ միացումը, երբ դրանք ունեն փաթույթների միացման տարբեր խմբեր, անթույլատրելի է:
Տրանսֆորմացիայի գործակիցների հավասարության պայմանը: Ենթադրենք, երկու տրանսֆորմատորներ ունեն տարբեր տրանսֆորմացիայի գործակիցներ, ընդ որում`
![]()
Ընդունենք,
որ տրանսֆորմատորների զուգահեռ միացման մնացած պայմանները պահպանված են, իսկ դրանց
առաջնային անվանական լարումները իրար հավասար են ![]()
Տրանսֆորմացիայի գործակիցները`
հետևաբար` ![]()
Երկրորդային
փաթույթների փակ կոնտուրում գործող վերոհիշյալ էլշու-ների ![]() տարբերությունն առաջացնում է հավասարեցնող
հոսանք, որը որոշվում է (1.45) հավասարությամբ:
տարբերությունն առաջացնում է հավասարեցնող
հոսանք, որը որոշվում է (1.45) հավասարությամբ:
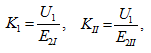
Նկ.. 1.31-ից
պարզ երևում է, որ հավասարեցնող հոսանքը տրանսֆորմատորների երկրորդային փաթույթներում
ունի տարբեր ուղղություններ ![]()
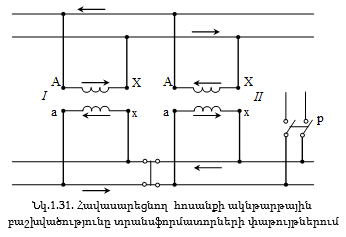
Լարման անկումները, որոնք առաջանում են հավասարեցնող հոսանքներից, հավասարեցնում են փաթույթների երկրորդային լարումները (նկ.1.32,ա):
Տրանսֆորմատորները
բեռնավորելիս hավասարեցնող հոսանքները գումարվում են բեռի հոսանքներին ![]() առաջացնելով
առաջացնելով ![]() և
և ![]() արդյունարար
հոսանքների անհավասարություն և տրանսֆորմատորների անհավասարաչափ բեռնվածություն:
Ընդ որում, բեռի բնույթն ընդունված է ակտիվ-ինդուկտիվ (նկ.1.32,բ): Վեկտորական
դիագրամի կառուցման պարզեցման նպատակով նկ.1.32,բ-ում ընդունված է
արդյունարար
հոսանքների անհավասարություն և տրանսֆորմատորների անհավասարաչափ բեռնվածություն:
Ընդ որում, բեռի բնույթն ընդունված է ակտիվ-ինդուկտիվ (նկ.1.32,բ): Վեկտորական
դիագրամի կառուցման պարզեցման նպատակով նկ.1.32,բ-ում ընդունված է ![]() այսինքն ընդունված է, որ
տրանսֆորմատորների անվանական հզորություններն իրար հավասար են:
այսինքն ընդունված է, որ
տրանսֆորմատորների անվանական հզորություններն իրար հավասար են:
Ընդհանուր դեպքում, թույլատրվում է տրանսֆորմացիայի գործակիցների տարբերություն անձնագրային արժեքներից 0,5%-ի չափով, իսկ տրանսֆորմատորների համար, որոնց` մինչև 1%:
Կարճ միացման լարումների հավասարության պայմանը: Դիտարկենք նույն միացման խմբեր և նույն անվանական լարումներ ունեցող երեք տրանսֆորմատորների զուգահեռ աշխատանքը: Այդ դեպքում ստացված արդյունքները կարելի է հեշտությամբ տարածել ցանկացած թվով զուգահեռ աշխատող տրանսֆորմատորների վրա: Անտեսելով մագնիսացման հոսանքները` կարելի է պատկերել երեք տրանսֆորմատորների զուգահեռ աշխատանքի սխեման այնպես, ինչպես պատկերված է նկ.1.33-ում:
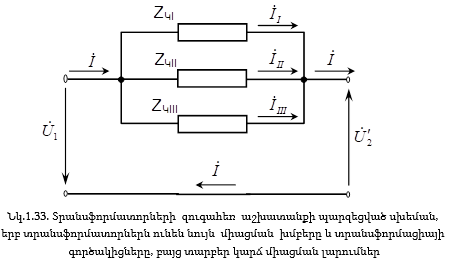
Լարման անկումը`
![]()
մյուս կողմից`
![]()
որտեղ`
Տրանսֆորմատորների հոսանքները`

Քանի որ ` ![]() ապա տրանսֆորմատորների լրիվ
հզորությունների թվաբանական գումարը հավասար կլինի բեռի լրիվ հզորությանը`
ապա տրանսֆորմատորների լրիվ
հզորությունների թվաբանական գումարը հավասար կլինի բեռի լրիվ հզորությանը`
![]()
Որոշ մաթեմատիկական ձևափոխություններ կատարելուց հետո, դժվար չէ ստանալ հետևյալ արտահայտությունը`

որտեղ`

Այսինքն` տրանսֆորմատորների հարաբերական բեռնվածությունները հակադարձ համեմատական են դրանց կարճ միացման լարումներին:
Եթե ![]() ապա
ապա ![]() այսինքն`տրանսֆորմատորները
բեռնավորվում են հավասարաչափ և բեռնվածքի մեծացման դեպքում հասնում են անվանական
հզորությանը միաժամանակ:
այսինքն`տրանսֆորմատորները
բեռնավորվում են հավասարաչափ և բեռնվածքի մեծացման դեպքում հասնում են անվանական
հզորությանը միաժամանակ:
Եթե ![]() ները միմյանց հավասար չեն, ապա բեռի
մեծացման դեպքում անվանական հզորությանը նախ կհասնի այն տրանսֆորմատորը, որի
ները միմյանց հավասար չեն, ապա բեռի
մեծացման դեպքում անվանական հզորությանը նախ կհասնի այն տրանսֆորմատորը, որի ![]() ն ամենափոքրն է: Մյուս տրանսֆորմատորներն
այդ դեպքում կլինեն թերբեռնված: Ընդհանուր բեռի հետագա մեծացումն անթույլատրելի է,
որովհետև առաջին տրանսֆորմատորը կգերբեռնավորվի: Զուգահեռ աշխատանքի այսպիսի
պայմանները չի կարելի բավարար համարել:
ն ամենափոքրն է: Մյուս տրանսֆորմատորներն
այդ դեպքում կլինեն թերբեռնված: Ընդհանուր բեռի հետագա մեծացումն անթույլատրելի է,
որովհետև առաջին տրանսֆորմատորը կգերբեռնավորվի: Զուգահեռ աշխատանքի այսպիսի
պայմանները չի կարելի բավարար համարել:
Այդ իսկ
պատճառով, խորհուրդ է տրվում միացնել զուգահեռ աշխատանքի այնպիսի տրանսֆորմատորներ,
որոնցից յուրաքանչյուրի համար ն տարբերվում է բոլոր տրանսֆորմատորների ![]() ների միջին թվաբանականից ոչ ավելի քան
ների միջին թվաբանականից ոչ ավելի քան ![]() -ով և, որոնց անվանական հզորությունների
հարաբերությունը գտնվում է 3:1 սահմաններում:
-ով և, որոնց անվանական հզորությունների
հարաբերությունը գտնվում է 3:1 սահմաններում:
2. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ԷԼԵԿՏՐԱԿԱՆ ՄԵՔԵՆԱՆԵՐ
Էլեկտրական մեքենաները էլեկտրական կամ մեխանիկական էներգիայի փոխակերպիչներ են, որոնք հիմնականում նախատեսված են մեխանիկական էներգիան էլեկտրական էներգիայի (գեներատորներ) կամ էլեկտրական էներգիան մեխանիկական էներգիայի (շարժիչներ) փոխակերպելու համար:
Էլեկտրական մեքենաների աշխատանքի (գործողության) սկզբունքը հիմնված է էլեկտրամագնիսական ինդուկցիայի երևույթի օգտագործման վրա:
Էլեկտրական մեքենան բաղկացած է երկու հիմնական մասերից` անշարժ (ստատոր) և շարժական (ռոտոր) մասերից, որոնք իրարից բաժանված են օդային բացակով: Մյուս մասերը` կառուցվածքային մասերն են, որոնք ապահովում են (իրականացնում են) մեքենայի անհրաժեշտ ամրությունը, շարժական մասի պտտման հնարավորությունը, հովացումը և այլն:
Փոփոխական հոսանքի մեքենաները լինում են, հիմնականում, երկու տիպի` ասինխրոն և սինխրոն էլեկտրական մեքենաներ: Վերջիններս (ինչպես և ցանկացած էլեկտրական մեքենա), տիրապետում են դարձելիության սկզբունքին և կարող են աշխատել ինչպես գեներատորային, այնպես էլ շարժիչային ռեժիմում:
Փոփոխական հոսանքի էլեկտրական մեքենայի մագնիսամիջուկը հավաքում են իրարից մեկուսացված թերթավոր էլեկտրատեխնիկական պողպատից:
Ստատորի ներքին և ռոտորի արտաքին մակերևույթների վրա կատարված երկայնական փորակներում տեղադրվում են համապատասխան փաթույթները:
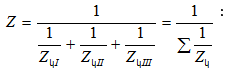
Եռաֆազ
փաթույթը ![]() բաղկացած է երեք ֆազերի փաթույթներից,
որոնցից ամեն մեկը զբաղեցնում է Z/3 փորակներ (նկ.2.1), որտեղ` Z-ը ստատորի
փորակների թիվն է:
բաղկացած է երեք ֆազերի փաթույթներից,
որոնցից ամեն մեկը զբաղեցնում է Z/3 փորակներ (նկ.2.1), որտեղ` Z-ը ստատորի
փորակների թիվն է:
Փաթույթի էլեմենտը կոճն է, որը բաղկացած է գալարներից:
Բևեռային բաժանարարը`
![]()
որտեղ` D-ն ստատորի ներքին տրամագիծն է (ստատորի փաթույթների համար) կամ ռոտորի տրամագիծն է (ռոտորի փաթույթների համար), 2p -բևեռների թիվն է:
Փաթույթի քայլն անվանում են լրիվ կամ տրամագծային, եթե նա հավասար է բևեռային բաժանարարին`

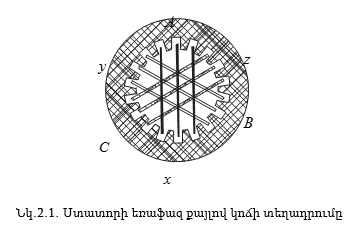
Եթե
փաթույթի քայլը`![]() ապա քայլն անվանում են կարճեցված
(նկ.2.2):
ապա քայլն անվանում են կարճեցված
(նկ.2.2):
Երկբևեռային մեքենայի ստատորի պարզագույն եռաֆազ փաթույթը բաղկացած է երեք կոճերից, որոնց առանցքները տարածության մեջ շեղված են միմյանցից 120 էլեկտրական աստիճանով:
Ստատորի եռաֆազ փաթույթն եռաֆազ ցանցին միացնելու դեպքում ֆազերի փաթույթներում առաջանում են հոսանքներ`
![]()
Ամեն մի ֆազի հոսանքը ստեղծում է բաբախող մշու, իսկ բոլոր մշու-ները միասին ստեղծում են արդյունարար մշու, որի վեկտորը պտտվում է ստատորի նկատմամբ: Պտտվող մշու-ի ստեղծման սկզբունքը քննարկենք եռաֆազ, երկբևեռ փաթույթի օրինակի հիման վրա, որի ամեն մի ֆազը բաղկացած է մի կոճից: Ֆազային փաթույթները միացված են աստղաձև:
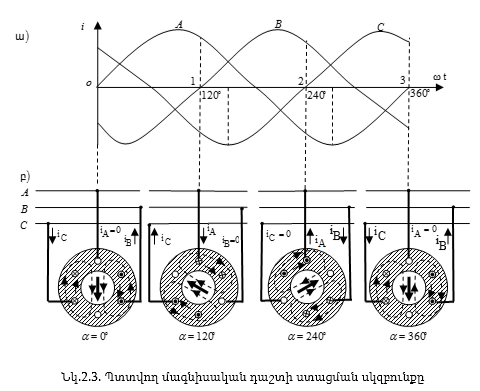
Կառուցենք եռաֆազ փաթույթի մշու-ի վեկտորը, ժամանակի տարբեր պահերի համար (0, 1, 2, 3): Ժամանակի «0» պահին ֆազում հոսանքը հավասար է 0-ի, ֆազում ունի բացասական ուղղություն, C ֆազում` դրական: Այնուհետև, ըստ այդ հոսանքների ստեղծած մագնիսական դաշտերի ուղղությունների, որոշում ենք ստատորի եռաֆազ փաթույթի մշու-ի վեկտորի ուղղությունը (այն ուղղված է դեպի ներքև): Ժամանակի «1» պահին B ֆազում է հոսանքը հավասար է 0-ի, A ֆազում` ունի դրական ուղղություն, C ֆազում` բացասական: Կատարելով համապատասխան կառուցումները` կտեսնենք, որ մշու-ի վեկտորը շրջվել է ժամանակի սլաքի ուղղությամբ 1200-ով: Կատարելով կառուցումներ ժամանակի «2» և «3» պահերի համար, տեսնում ենք, որ մշու-ի վեկտորն ամեն անգամ շրջվում է 1200-ով և փոփոխական հոսանքի մեկ պարբերության ժամանակ, մեկ լրիվ պտույտ է տալիս (3600):
Եթե
ստատորի փաթույթի հոսանքի հաճախությունը ![]() ապա մշու-ի վեկտորը պտտվում է 50պտ/վ հաճախությամբ: Ընդհանուր
դեպքում մշու-ի վեկտորի պտտման արագությունը
ապա մշու-ի վեկտորը պտտվում է 50պտ/վ հաճախությամբ: Ընդհանուր
դեպքում մշու-ի վեկտորի պտտման արագությունը ![]() որն այլ կերպ կոչվում է պտտման սինխրոն արագություն, որոշվում
է հետևյալ բանաձևով`
որն այլ կերպ կոչվում է պտտման սինխրոն արագություն, որոշվում
է հետևյալ բանաձևով`
![]()
որտեղ p -ն ստատորի փաթույթի զույգ բևեռների թիվն է:
Պտտվող մագնիսական դաշտն ինդուկտում է կոճում էլշու, որի ակնթարթային արժեքը`
![]()
որտեղ ![]() -ն օդային բացակում (ստատորի և ռոտորի
միջև) մագնիսական ինդուկցիան է,
-ն օդային բացակում (ստատորի և ռոտորի
միջև) մագնիսական ինդուկցիան է, ![]() -ը`
գալարի հաղորդալարի ակտիվ երկարությունը, V – ն մշու-ի հիմնական հարմոնիկի
տեղափոխման գծային արագությունն է,
-ը`
գալարի հաղորդալարի ակտիվ երկարությունը, V – ն մշու-ի հիմնական հարմոնիկի
տեղափոխման գծային արագությունն է, ![]() -ն`
կոճի գալարների թիվը:
-ն`
կոճի գալարների թիվը:
Այսպիսով,
էլշու-ի կորի ձևը կախված է նրանից, թե ինչպես է բաշխված ![]() -ն օդային բացակում:
-ն օդային բացակում: ![]() -ի բաշխվածությունն օդային բացակում
սինուսոիդային չի լինում, այդ իսկ պատճառով
-ի բաշխվածությունն օդային բացակում
սինուսոիդային չի լինում, այդ իսկ պատճառով ![]() -ն
էլ սինուսոիդային չէ և բացի առաջին (հիմնական) հարմոնիկից պարունակում է բարձր
կարգի հարմոնիկներ:
-ն
էլ սինուսոիդային չէ և բացի առաջին (հիմնական) հարմոնիկից պարունակում է բարձր
կարգի հարմոնիկներ:
Նշենք որ, կոճի քայլը կարճացնելով, կարելի է էլշու-ի որոշ հարմոնիկներ ոչնչացնել: Օրինակ, եթե կարճացնենք կոճի քայլը բևեռային բաժանարարի 1/5-րդ մասով, այսինքն կոճի քայլն ընդունել`
![]()
ապա
կարելի է ոչնչացնել 5-րդ հարմոնիկը: y քայլի հարաբերությունը ![]() -ին անվանում են փաթույթի հարաբերական
քայլ`
-ին անվանում են փաթույթի հարաբերական
քայլ`
![]()
Սովորաբար, ![]() -ն վերցնում են`
-ն վերցնում են` ![]() =0,8…0,89 սահմաններում:
=0,8…0,89 սահմաններում:
Սակայն
քայլի կարճացումը բերում է էլշու-ի փոքրացմանը, որը հաշվի է առնվում քայլի
կարճացման գործակցի ![]() միջոցով:
միջոցով:
Փաթույթները լինում են կենտրոնացված և բաշխված: Կենտրոնացված փաթույթի դեպքում բևեռին ընկնող ֆազի բոլոր կոճերը, որոնք կազմում են կոճային խումբ, տեղադրվում են երկու փորակների մեջ:
Բաշխված փաթույթներում բոլոր կոճերը հավասարաչափ տեղադրվում են ստատորի պարագծով:
Փաթույթի կարևոր պարամետր է մեկ բևեռին և ֆազին ընկնող փորակների թիվը`
![]()
Օրինակ, կենտրոնացված փաթույթում, որտեղ զույգ բևեռներին ընկնում է 2 փորակ ամեն մի ֆազից`q = 1:
Բաշխված փաթույթում` q > 1:
Կենտրոնացված փաթույթի դեպքում կոճային խմբի էլշու-ն հավասար է կոճերի էլշու-ների թվաբանական գումարին:
Բաշխված փաթույթի դեպքում կոճերը տարածության մեջ
շեղված են միմյանց նկատմամբ: Դրա համար էլ կոճերում էլշու-ներն ըստ ֆազի նույնպես
շեղված են և, այժմ, կոճային խմբի էլշու-ն հավասար է լինում կոճերի էլշու-ների
երկրաչափական գումարին: Դա բերում է էլշու-ի փոքրացմանը և այդ փոքրացումը հաշվի է
առնվում փաթույթի բաշխման գործակցի` ![]() միջոցով:
միջոցով:
Բաշխված
փաթույթի դեպքում կոճերը տարածության մեջ շեղված են միմյանց նկատմամբ: Դրա համար
էլ կոճերում էլշու-ներն ըստ ֆազի նույնպես շեղված են և, այժմ, կոճային խմբի
էլշու-ն հավասար է լինում կոճերի էլշու-ների երկրաչափական գումարին: Դա բերում է
էլշու-ի փոքրացմանը և այդ փոքրացումը հաշվի է առնվում փաթույթի բաշխման գործակցի`
![]() միջոցով:
միջոցով:
Որոշ
դեպքերում, էլշու-ի բարձր հարմոնիկների փոքրացման նպատակով, կատարում են փորակների
շեղում: Վերջինս իր հերթին բերում է էլշու-ի փոքրացմանը, որը հաշվի է առնվում
շեղման գործակցի ![]() միջոցով:
միջոցով:
Այսպիսով, փաթույթի ֆազային էլշու-ն`
![]()
որտեղ W -ն փաթույթի ֆազի գալարների թիվն է:
Փաթույթային գործակիցը`
![]()
2.2. Ասինխրոն մեքենայի կառուցվածքը և
աշխատանքի սկզբունքը
Ասինխրոն մեքենաները գլխավորապես օգտագործվում են որպես շարժիչներ: Արդյունաբերությունում և ժողովրդական տնտեսության մյուս ճյուղերում օգտագործվող շարժիչների գերակշռող մասն ասինխրոն շարժիչներ են: Ասինխրոն շարժիչները հիմնականում տարբերվում են մյուս տիպի շարժիչներից իրենց պարզ կառուցվածքով և բարձր հուսալիությամբ: Ասինխրոն մեքենայի անունը պայմանավորված է այն հանգամանքով, որ այդ մեքենաների ռոտորի պտտման արագությունը տարբերվում է պտտվող մագնիսական դաշտի արագությունից, այսինքն, այլ խոսքերով ասած ռոտորի պտտման արագությունը պտտվող մագնիսական դաշտի նկատմամբ ասինխրոն է:
Այստեղ, հիմնականում, կքննարկվեն և կուսումնասիրվեն եռաֆազ ասինխրոն շարժիչները:
Ասինխրոն մեքենայի ստատորի և ռոտորի միջուկները հավաքվում են իրարից մեկուսացված էլեկտրատեխնիկական պողպատի թերթերից (նկ.2.4.):
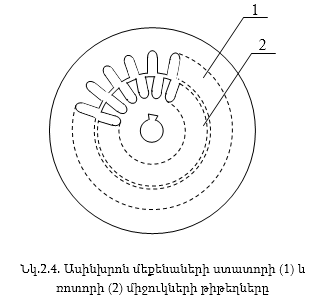
Ստատորի միջուկն ամրացվում է իրանում, իսկ ռոտորի միջուկը` լիսեռի վրա: Ռոտորի լիսեռը պտտվում է առանցքակալներում, որոնք տեղավորվում են ստատորի իրանին ամրացված առանցքակալային վահաններում:
Տարբերում են ֆազային և կարճ միացված ռոտորով ասինխրոն մեքենաներ:
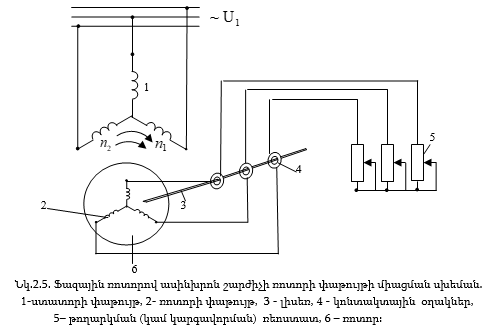
Ֆազային ռոտորով ասինխրոն մեքենայում ռոտորի փաթույթը պատրաստվում է եռաֆազ` ստատորի փաթույթի նման: Ռոտորի փաթույթի ֆազերի ծայրերը սովորաբար միացվում են աստղաձև: Ազատ ծայրերը կոնտակտային օղակների և խոզանակների օգնությամբ դուրս են հանվում մեքենայից և միացվում են եռաֆազ թողարկման կամ կարգավորման ռեոստատին (նկ.2.5.): Ռոտորի փաթույթը պատրաստվում է բևեռների նույն թվով, ինչպես և ստատորը:
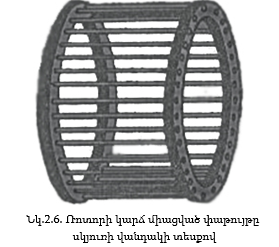
Կարճ միացված կամ սկյուռավանդակով ասինխրոն մեքենայի ռոտորի փորակներում գտնվում են պղնձե կամ ալյումինե ձողեր և ձողերի ծայրերը ռոտորի երկու ճակատներից միացված են պղնձե կամ ալյումինե օղակներով: Այսինքն` ձողերի ծայրերն այդ օղակների միջոցով կարճ են փակված (նկ.2.6):
Ասինխրոն մեքենաների հովացումը հիմնականում կատարվում է օդով:
Ասինխրոն
մեքենայի աշխատանքը
հիմնված է պտտվող մագնիսական դաշտի և ռոտորի փաթույթի հոսանքների փոխազդեցության
վրա: Քննարկենք եռաֆազ ասինխրոն շարժիչի աշխատանքի սկզբունքը: Ստատորի եռաֆազ
փաթույթը ![]() լարմամբ և
լարմամբ և ![]() հաճախությամբ ցանցին միացնելիս առաջանում
է պտտվող մագնիսական դաշտ, որի պտտման արագությունը (սինխրոն արագությունը)`
հաճախությամբ ցանցին միացնելիս առաջանում
է պտտվող մագնիսական դաշտ, որի պտտման արագությունը (սինխրոն արագությունը)`

որտեղ p -ն զույգ բևեռների թիվն է:
Ստատորի
պտտվող դաշտը հատելով ռոտորի փաթույթի հաղորդալարերն ինդուկտում է նրանցում էլշու:
Եթե ռոտորի փաթույթը փակ է, ապա նրանում առաջանում է հոսանք, որի ![]() հաճախությունն անշարժ ռոտորի դեպքում
հավասար է`
հաճախությունն անշարժ ռոտորի դեպքում
հավասար է`
![]()
Ռոտորի փաթույթի հոսանքը ստեղծում է իր պտտվող մագնիսական դաշտը, որը ստատորի մագնիսական դաշտի հետ միասին պայմանավորում է շարժիչի ընդհանուր մագնիսական դաշտը: Վերջինս փոխազդելով ռոտորի փաթույթի հոսանքների հետ` առաջացնում է պտտվող էլեկտրամագնիսական մոմենտ, և ռոտորը սկսում է պտտվել դաշտի պտտման ուղղությամբ: Նշենք, որ պտտվող մոմենտը ստեղծվում է ռոտորի հոսանքի ակտիվ բաղադրիչով:
Դաշտի
![]() և ռոտորի
և ռոտորի ![]() պտտման արագությունների հարաբերական տարբերությունն
անվանում են սահք`
պտտման արագությունների հարաբերական տարբերությունն
անվանում են սահք`

այստեղից`
![]()
Շարժիչի թողարկման ժամանակ ![]() իսկ ռոտորի սինխրոն
արագությամբ պտտման դեպքում
իսկ ռոտորի սինխրոն
արագությամբ պտտման դեպքում ![]() : Երբ
: Երբ ![]() ապա
պտտվող մագնիսական դաշտը ռոտորի նկատմամբ անշարժ է, ռոտորի փաթույթում հոսանքներ
չեն ինդուկտվում և պտտող մոմենտը M=0: Այդ իսկ պատճառով շարժիչը չի կարող
հասնել այդպիսի պտտման արագության:
ապա
պտտվող մագնիսական դաշտը ռոտորի նկատմամբ անշարժ է, ռոտորի փաթույթում հոսանքներ
չեն ինդուկտվում և պտտող մոմենտը M=0: Այդ իսկ պատճառով շարժիչը չի կարող
հասնել այդպիսի պտտման արագության:
Քանի որ ռոտորի փաթույթի էլշու-ի
հաճախությունը համեմատական է ![]() -ին, ապա`
-ին, ապա`
![]()
Նկատի ունենալով (2.10)-ը, կստանանք
![]()
այսինքն` ռոտորի շղթայի հաճախությունը համեմատական է սահքին:
Ռոտորի դաշտի պտտման արագությունն իր իսկ ռոտորի նկատմամբ`

Ռոտորի դաշտի պտտման արագությունը ստատորի նկատմամբ`
![]()
այսինքն`
ռոտորի դաշտի պտտման ![]() արագությունը
ստատորի նկատմամբ ռոտորի պտտման ցանկացած
արագությունը
ստատորի նկատմամբ ռոտորի պտտման ցանկացած ![]() արագության
դեպքում միշտ հավասար է ստատորի դաշտի պտտման
արագության
դեպքում միշտ հավասար է ստատորի դաշտի պտտման ![]() արագությանը:
Այդ պատճառով ստատորի և ռոտորի դաշտերը, անկախ ռոտորի պտտման արագությունից,
պտտվում են միշտ սինխրոն և ստեղծում են (ինչպես արդեն նշել ենք) ընդհանուր պտտվող
մագնիսական դաշտ:
արագությանը:
Այդ պատճառով ստատորի և ռոտորի դաշտերը, անկախ ռոտորի պտտման արագությունից,
պտտվում են միշտ սինխրոն և ստեղծում են (ինչպես արդեն նշել ենք) ընդհանուր պտտվող
մագնիսական դաշտ:
Նշենք, որ այս կարևոր հետևությունը վերաբերում է դաշտերի միայն առաջին հարմոնիկներին:
Նույն նպատակների համար, ինչ և տրանսֆորմատորների դեպքում, ասինխրոն մեքենայի երկրորդային փաթույթը բերում են առաջնայինին: Իրական երկրորդային փաթույթը փոխարինվում է բերվածով, որն ունի նույնպիսի կառուցվածք ինչպիսին և առաջնային փաթույթը, նույնպիսի ֆազերի և ֆազում գալարների թիվ, ինչպես նաև` միանման փաթույթային գործակից:
Երկրորդային փաթույթի բերված լարումները և հոսանքները պետք է այնպես հաշվարկվեն, որպեսզի մեքենայում էներգետիկ և էլեկտրամագնիսական հարաբերակցությունները չխախտվեն:
Բերված մեծությունները նշանակում են նրբագծերով:
2.3. Ասինխրոն մեքենայի աշխատանքը անշարժ
ռոտորի դեպքում
Անշարժ ռոտորի դեպքում ասինխրոն մեքենան տրանսֆորմատոր է և տարբերվում է նրանից միայն իր կառուցվածքով:
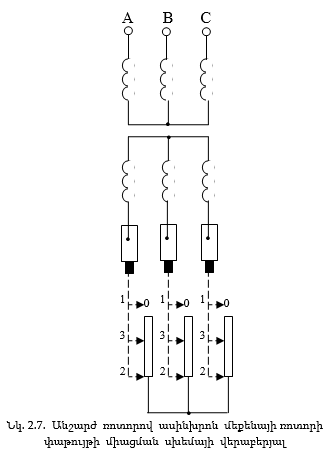
Ենթադրենք`
ասինխրոն մեքենայի ռոտորի փաթույթի ծայրերը բաց են (նկ.2.7 դիրք 1), իսկ ստատորի
փաթույթը միացված է ![]() լարումով
ցանցին: Այս դեպքում, ասինխրոն մեքենան պարապ ընթացքի ռեժիմով աշխատող
տրանսֆորմատոր է:
լարումով
ցանցին: Այս դեպքում, ասինխրոն մեքենան պարապ ընթացքի ռեժիմով աշխատող
տրանսֆորմատոր է:
![]() լարման ազդեցության տակ ստատորի
փաթույթով հոսում է
լարման ազդեցության տակ ստատորի
փաթույթով հոսում է ![]() հոսանքը,
առաջանում է
հոսանքը,
առաջանում է ![]() մշու, որի ստեղծած հոսքի մի մասը
(հիմնական հոսք) կապակցվում է մեքենայի թե` ռոտորի և ստատորի փաթույթների հետ,
իսկ մյուս մասը (ցրման հոսք)` միայն ստատորի փաթույթի հետ:
մշու, որի ստեղծած հոսքի մի մասը
(հիմնական հոսք) կապակցվում է մեքենայի թե` ռոտորի և ստատորի փաթույթների հետ,
իսկ մյուս մասը (ցրման հոսք)` միայն ստատորի փաթույթի հետ:
Հիմնական
հոսքն ինդուկտում է ստատորի և ռոտորի փաթույթներում համապատասխանաբար ![]() էլշու-ներ, իսկ ցրման հոսքը` ստատորի
փաթույթում
էլշու-ներ, իսկ ցրման հոսքը` ստատորի
փաթույթում ![]() ցրման էլշու: Քանի որ ռոտորն անշարժ է,
ապա
ցրման էլշու: Քանի որ ռոտորն անշարժ է,
ապա ![]() հոսքը ռոտորի և ստատորի նկատմամբ
պտտվում է նույն
հոսքը ռոտորի և ստատորի նկատմամբ
պտտվում է նույն ![]() արագությամբ, հետևաբար`
արագությամբ, հետևաբար`
![]()
Եթե
արգելակված ռոտորի փաթույթի ծայրերը 1 դիրքից տեղափոխենք 2 դիրքը (նկ.2.7 ), ապա
փաթույթը կլինի իր վրա կարճ փակված: Իր ֆիզիկական էությամբ ասինխրոն մեքենայի
ռոտորի փաթույթի այսպիսի կարճ միացումը որոշակիորեն համանման է տարնսֆորմատորի
երկրորդային փաթույթի կարճ միացմանը: Այս դեպքում, ստատորի և ռոտորի փաթույթներում
![]() հոսանքների անթույլատրելի մեծացումը
սահմանափակելու համար, ստատորի փաթույթին մատուցվում է ցածրացված (իջեցված)
լարում:
հոսանքների անթույլատրելի մեծացումը
սահմանափակելու համար, ստատորի փաթույթին մատուցվում է ցածրացված (իջեցված)
լարում:
Տեղափոխենք այժմ ռեոստատի շարժական կոնտակտը 3 դիրք (նկ.2.7): Այս դեպքում ասինխրոն մեքենան կարելի է դիտարկել որպես բեռնավորված տրանսֆորմատոր: Միակ տարբերությունն այն է, որ տվյալ դեպքում (ի տարբերություն տրանսֆորմատորի) մագնիսական դաշտը պտտվող է:
Արգելակված ռոտորով ասինխորն մեքենան գործնականում օգտագործում են եռաֆազ փոփոխական լարման կարգավորման համար (ինդուկցիոն կարգավորիչներ): Ինդուկցիոն կարգավորիչի միացման սխեման տրված է նկ.2.8-ում:
Այս դեպքում առաջնային կողմը համարվում է ռոտորը, որը համապատասխան սարքավորման միջոցով հնարավորություն ունի շրջվելու, իսկ երկրորդային կողմը` ստատորը:
Ռոտորի
փաթույթին մատուցված եռաֆազ հոսանքը ստեղծում է պտտվող մագնիսական դաշտ, որն ինդուկտում
է ստատորի և ռոտորի փաթույթներում համապատասխանաբար ![]() էլշու-ներ:
էլշու-ներ:
Սպառիչին մատուցվող ելքային լարումը`
![]()
Քանի որ ![]() վեկտորները գումարվում են երկրաչափորեն,
ապա ելքային լարման գործող արժեքը կախված կլինի վերոհիշյալ վեկտորների միջև
ֆազային շեղման
վեկտորները գումարվում են երկրաչափորեն,
ապա ելքային լարման գործող արժեքը կախված կլինի վերոհիշյալ վեկտորների միջև
ֆազային շեղման ![]() անկյունից: Շրջելով ռոտորը, այսինքն`
փոփոխելով
անկյունից: Շրջելով ռոտորը, այսինքն`
փոփոխելով ![]() -ն, կարելի է որոշակի սահմաններում փոփոխել
ելքային լարումը:
-ն, կարելի է որոշակի սահմաններում փոփոխել
ելքային լարումը:
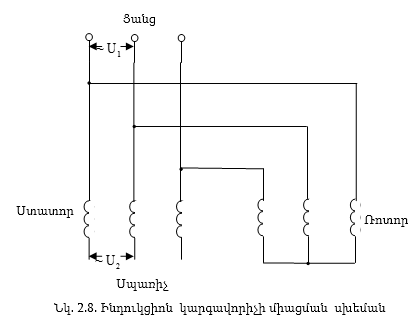
2.4. Ասինխրոն շարժիչի լարումների և հոսանքների
հավասարումները
Ասինխրոն
շարժիչի աշխատանքի պրոցեսում ստատորի և ռոտորի մշու-ների համատեղ ստեղծած
գումարային մագնիսական ![]() հոսքը,
պտտվելով
հոսքը,
պտտվելով ![]() սինխրոն արագությամբ, ինդուկտում է
ստատորի փաթույթում (առաջնային փաթույթ) էլշու, որը որոշվում է հետևյալ բանաձևով`
սինխրոն արագությամբ, ինդուկտում է
ստատորի փաթույթում (առաջնային փաթույթ) էլշու, որը որոշվում է հետևյալ բանաձևով`
![]()
որտեղ
![]() -ը ստատորի փաթույթի ֆազի
գալարների թիվն է,
-ը ստատորի փաթույթի ֆազի
գալարների թիվն է, ![]() –ն` ստատորի փաթույթային գործակիցը:
–ն` ստատորի փաթույթային գործակիցը:
Ստատորի ցրման էլշու-ն, որը պայմանավորված է ստատորի ցրման մագնիսական հոսքով, կլինի`
![]()
որտեղ
![]() - ը ստատորի փաթույթի հոսանքի վեկտորն է,
- ը ստատորի փաթույթի հոսանքի վեկտորն է,
![]() - ն ստատորի փաթույթի ցրման ինդուկտիվ
դիմադրությունը:
- ն ստատորի փաթույթի ցրման ինդուկտիվ
դիմադրությունը:
Ստատորի փաթույթի ակտիվ դիմադրության վրա լարման անկումը`
![]()
որտեղ ![]() -ը ստատորի փաթույթի ակտիվ դիմադրությունն է:
-ը ստատորի փաթույթի ակտիվ դիմադրությունն է:
Այսպիսով, ստատորի փաթույթին մատուցված լարումը`
որտեղ` ![]() -ը ստատորի փաթույթի լրիվ դիմադրությունն
է:
-ը ստատորի փաթույթի լրիվ դիմադրությունն
է:
(2.19) արտահայտությունը ստատորի փաթույթի լարումների հավասարումն է:
Շարժիչի հիմնական հոսքն ինդուկտում է, նաև, ռոտորի փաթույթում (երկրորդային փաթույթ) էլշու, որը որոշվում է հետևյալ բանաձևով`
![]()
Ընդ որում`
![]()
որտեղ
![]() -ը անշարժ ռոտորի դեպքում (s=1 ) ռոտորի փաթույթում ինդուկտված
էլշու-ն է,
-ը անշարժ ռոտորի դեպքում (s=1 ) ռոտորի փաթույթում ինդուկտված
էլշու-ն է, ![]() -ն ռոտորի փաթույթային գործակիցը:
-ն ռոտորի փաթույթային գործակիցը:
Ռոտորի ցրման էլշու-ն, որը պայմանավորված է ռոտորի ցրման մագնիսական հոսքով, կլինի`
![]()
որտեղ
![]() -ը անշարժ ռոտորի դեպքում ռոտորի
փաթույթի ցրման ինդուկտիվ դիմադրությունն է,
-ը անշարժ ռոտորի դեպքում ռոտորի
փաթույթի ցրման ինդուկտիվ դիմադրությունն է, ![]() ռոտորի փաթույթի հոսանքը:
ռոտորի փաթույթի հոսանքը:
Քանի որ շարժիչի աշխատանքի գործընթացում ռոտորի փաթույթը կարճ է փակված, ապա`
![]()
որտեղ
![]() -ը ռոտորի փաթույթի ակտիվ դիմադրությունն
է:
-ը ռոտորի փաթույթի ակտիվ դիմադրությունն
է:
Բաժանելով (2.23) արտահայտության անդամները S-ի` կստանանք`
![]()
(2.24) արտահայտությունը ռոտորի փաթույթի լարումների հավասարումն է:
Բերված ասինխրոն շարժիչի համար (2.24)-ը կգրվի հետևյալ կերպ`
![]()
Եթե անտեսենք առաջնային փաթույթում լարման անկումը և ընդունենք, որ`
![]()
ապա` քանի
որ ![]() էլշու-ն համեմատական է
էլշու-ն համեմատական է ![]() հոսքին, բեռի փոփոխումների դեպքում,
չնայած ստատորի և ռոտորի փաթույթների հոսանքների փոփոխմանը, հոսքը գործնականում
կմնա հաստատուն: Նկատի ունենալով, որ այդ հոսքը շարժիչում ստեղծվում է ստատորի
փաթույթի
հոսքին, բեռի փոփոխումների դեպքում,
չնայած ստատորի և ռոտորի փաթույթների հոսանքների փոփոխմանը, հոսքը գործնականում
կմնա հաստատուն: Նկատի ունենալով, որ այդ հոսքը շարժիչում ստեղծվում է ստատորի
փաթույթի ![]() և ռոտորի փաթույթի
և ռոտորի փաթույթի ![]() մշու-ների համատեղ գործողությամբ, կարող
ենք գրել, որ
մշու-ների համատեղ գործողությամբ, կարող
ենք գրել, որ
![]()
որտեղ ![]() -ը շարժիչի գումարային մշու-ն է, որը թվապես
հավասար է պարապ ընթացքի ռեժիմում ստատորի փաթույթի
-ը շարժիչի գումարային մշու-ն է, որը թվապես
հավասար է պարապ ընթացքի ռեժիմում ստատորի փաթույթի
մշու-ին, կամ
![]()
![]() -ն, որը հավասար է առաջնային և երկրորդային բերված հոսանքների երկրաչափական
գումարին, կոչվում է պարապ ընթացքի հոսանք:
-ն, որը հավասար է առաջնային և երկրորդային բերված հոսանքների երկրաչափական
գումարին, կոչվում է պարապ ընթացքի հոսանք:
(2.26)-ը բերված ասինխրոն շարժիչի հոսանքների հավասարումն է:
Ասինխրոն
մեքենայում օդային բացակի առկայության պատճառով ![]() հոսանքն ունի բավականաչափ մեծ արժեք (տրանսֆորմատորի պարապ
ընթացքի հոսանքի մեծության համեմատ) և կազմում է, սովորաբար, անվանական հոսանքի 20-ից
50 %-ը:
հոսանքն ունի բավականաչափ մեծ արժեք (տրանսֆորմատորի պարապ
ընթացքի հոսանքի մեծության համեմատ) և կազմում է, սովորաբար, անվանական հոսանքի 20-ից
50 %-ը:
(2.26) հավասարումից`
![]()
2.5.Ասինխրոն շարժիչի վեկտորական դիագրամը
Ասինխրոն շարժիչի վեկտորական դիագրամը կառուցում են ըստ շարժիչի լարումների և հոսանքների հավասարումների: Մի անգամ ևս նշենք այդ հավասարումները.
![]() -մեծությունն արտահայտենք հետևյալ տեսքով`
-մեծությունն արտահայտենք հետևյալ տեսքով` ![]()

հաշվի առնելով (2.24)-ը, ռոտորի շղթայի լարումների հավասարումը կգրվի հետևյալ տեսքով`

![]() -ի և
-ի և ![]() -ի միջև ֆազային շեղման անկյունը որոշվում է ըստ հետևյալ բանաձևի`
-ի միջև ֆազային շեղման անկյունը որոշվում է ըստ հետևյալ բանաձևի`

Վեկտորական
դիագրամի կառուցումը սկսվում է նրանից, որ հորիզոնական ուղղությամբ տեղադրվում է ![]() առավելագույն հոսքի վեկտորը: Պարապ
ընթացքի հոսանքը չի համընկնում
առավելագույն հոսքի վեկտորը: Պարապ
ընթացքի հոսանքը չի համընկնում ![]() -ի հետ, քանի որ այդ հոսանքն ունի ակտիվ և ռեակտիվ
բաղադրիչներ`
-ի հետ, քանի որ այդ հոսանքն ունի ակտիվ և ռեակտիվ
բաղադրիչներ`

Պարապ ընթացքի հոսանքի ![]() ռեակտիվ բաղադրիչը համընկնում է
ռեակտիվ բաղադրիչը համընկնում է ![]() -ի հետ, իսկ
-ի հետ, իսկ ![]() ակտիվ բաղադրիչը
ակտիվ բաղադրիչը ![]() -ից առաջ է ընկնած 900-ով:
-ից առաջ է ընկնած 900-ով: ![]() էլշու-ն հետ է ընկած
էլշու-ն հետ է ընկած ![]() -ից 900-ով:
-ից 900-ով: ![]() հոսանքը հետ է ընկած
հոսանքը հետ է ընկած ![]() -ից
-ից ![]() անկյունով: Այնուհետև, կառուցում են
անկյունով: Այնուհետև, կառուցում են ![]() -ը նկատի ունենալով, որ
-ը նկատի ունենալով, որ
![]()
Մյուս կառուցումները կատարվում են ըստ լարումների հավասարումների (նկ.2.9):
Վեկտորական դիագրամները կարելի է կառուցել բեռի հոսանքի մի քանի արժեքների դեպքում և ըստ այդ դիագրամների կարելի է դատել` բեռի փոփոխման ժամանակ, հոսանքների, կորուստների, հզորության գործակցի և լարման փոփոխությունների մասին:
Բազմապատկենք
(2.32) հավասարման աջ և ձախ մասերը ![]() -ով`
-ով`

![]() -ը ռոտորի փաթույթում էլեկտրական կորուստներն
են,
-ը ռոտորի փաթույթում էլեկտրական կորուստներն
են, ![]() էլեկտրամագնիսական հզորություն, որը
փոխանցվում է մագնիսական դաշտի միջոցով ստատորից ռոտորին:
էլեկտրամագնիսական հզորություն, որը
փոխանցվում է մագնիսական դաշտի միջոցով ստատորից ռոտորին:
Մեխանիկական հզորությունը շարժիչի ռոտորի վրա`

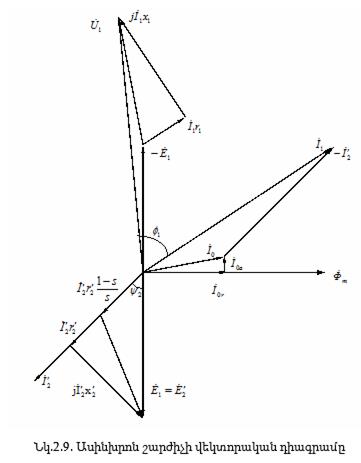
2.6.Ասինխրոն շարժիչի փոխարինման սխեման
(2.28) հավասարումներին համապատասխանում է, այսպես կոչված, T-աձև փոխարինման սխեման (նկ.2.10):
Այստեղ` ![]() -ը փոխինդուկցիայի դիմադրությունն է:
-ը փոխինդուկցիայի դիմադրությունն է:
Լարման անկումը փոխինդուկցիայի դիմադրության վրա`
![]()
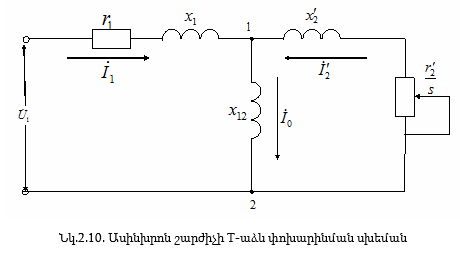
Նկ.2.10 փոխարինման սխեման հաշվի չի առնում շարժիչի պողպատում մագնիսական կորուստները:
Պողպատում
կորուստները հաշվի առնելու համար նկ.2.10. սխեմայի 1 և 2 սեղմակների վրա (![]() -ին զուգահեռ) անհրաժեշտ է միացնել
-ին զուգահեռ) անհրաժեշտ է միացնել ![]() ակտիվ դիմադրությունը, ընդ որում,
ակտիվ դիմադրությունը, ընդ որում, ![]() -ի մեծությունը պետք է լինի այնպիսին, որ
նրանում կորուստները հավասար լինեն շարժիչի պողպատում կորուստներին
-ի մեծությունը պետք է լինի այնպիսին, որ
նրանում կորուստները հավասար լինեն շարժիչի պողպատում կորուստներին ![]()

որտեղից`

![]() զուգահեռ
միացված դիմադրությունները կարելի է արտահայտել մի ընդհանուր դիմադրությամբ, որին
կանվանենք մագնիսացնող շղթայի լրիվ դիմադրություն
զուգահեռ
միացված դիմադրությունները կարելի է արտահայտել մի ընդհանուր դիմադրությամբ, որին
կանվանենք մագնիսացնող շղթայի լրիվ դիմադրություն ![]()

կամ
![]()
Արդյունքում, նկ.2.10-ի սխեմայի փոխարեն կստանանք նկ.2.11-ի սխեման:
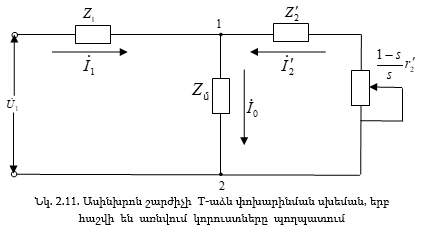
ընդ որում`

T-աձև
փոխարինման սխեմայից երևում է, որ բեռի մեծացմանը զուգընթաց մեծանում են ![]() հոսանքները, մեծանում է առաջնային
շղթայում լարման անկումը, փոքրանում է
հոսանքները, մեծանում է առաջնային
շղթայում լարման անկումը, փոքրանում է ![]() էլշու-ն,
որն էլ բերում է
էլշու-ն,
որն էլ բերում է ![]() հոսանքի փոքրացմանը: Սակայն անվանական
ռեժիմների համար սահքի ոչ մեծ սահմաններում փոփոխման դեպքում
հոսանքի փոքրացմանը: Սակայն անվանական
ռեժիմների համար սահքի ոչ մեծ սահմաններում փոփոխման դեպքում ![]() հոսանքի փոփոխությունը կարելի է հաշվի
չառնել:
հոսանքի փոփոխությունը կարելի է հաշվի
չառնել:
Ասինխրոն
շարժիչի T-աձև փոխարինման սխեման կարելի է ձևափոխել և բերել ավելի պարզ տեսքի, եթե
մագնիսացնող ճյուղը միացվի արտաքին սեղմակներին (![]() լարմանը):
Սակայն այս դեպքում`
լարմանը):
Սակայն այս դեպքում`![]() հոսանքի
գործնականում անփոփոխությունն ապահովելու նպատակով, անհրաժեշտ է մագնիսացնող
ճյուղում
հոսանքի
գործնականում անփոփոխությունն ապահովելու նպատակով, անհրաժեշտ է մագնիսացնող
ճյուղում ![]() -ին հաջորդաբար միացնել
-ին հաջորդաբար միացնել ![]() դիմադրությունը (նկ.2.12): Այսպիսի
փոխարինման սխեման անվանում են ասինխրոն շարժչի թ-աձև փոխարինման սխեմա:
դիմադրությունը (նկ.2.12): Այսպիսի
փոխարինման սխեման անվանում են ասինխրոն շարժչի թ-աձև փոխարինման սխեմա:
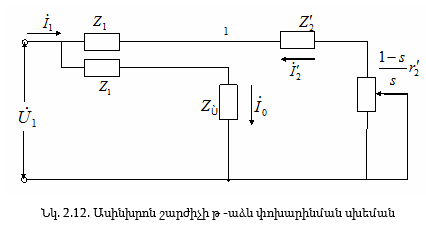
2.7.Ասինխրոն մեքենայի աշխատանքային ռեժիմները
Կախված պտտվող դաշտի նկատմամբ ռոտորի պտտման արագությունից և ուղղությունից` տարբերում են ասինխրոն մեքենայի աշխատանքի երեք ռեժիմ.
1) Շարժիչային ռեժիմ (նկ.2.13, ա): Այս ռեժիմում ասինխրոն մեքենան էլեկտրական էներգիան փոխակերպում է մեխանիկական էներգիայի, իսկ սահքը փոփոխվում է`
![]()
Ընդ որում, ռոտորը պտտվում է պտտվող մագնիսական դաշտի ուղղությամբ, իսկ նրա արագությունը`
![]() :
:
Շարժիչային
ռեժիմում ասինխրոն մեքենայի էլեկտրամագնիսական մոմենտը պտտող մոմենտ է:
Աշխատանքային հաստատված գործընթացում էլեկտրամագնիսական մոմենտը հավասարակշռվում
է ռոտորի պտտմանը հակազդող մոմենտների գումարով: Նշենք, նաև, որ առաջնային
հզորությունը ![]() , այսինքն ցանցից սպառվում է ակտիվ հզորություն
, այսինքն ցանցից սպառվում է ակտիվ հզորություն
![]()
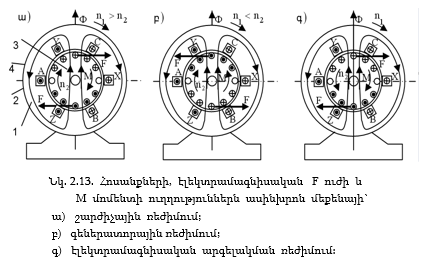
2) Գեներատորային
ռեժիմ (նկ.2.13, բ): Եթե ![]() լարմանը
միացված ասինխրոն մեքենայի ռոտորը առաջնային շարժիչի օգնությամբ պտտենք պտտվող
մագնիսական դաշտի ուղղությամբ, այնպես որ ռոտորի արագությունը գերազանցի պտտվող
մագնիսական դաշտի արագությանը`
լարմանը
միացված ասինխրոն մեքենայի ռոտորը առաջնային շարժիչի օգնությամբ պտտենք պտտվող
մագնիսական դաշտի ուղղությամբ, այնպես որ ռոտորի արագությունը գերազանցի պտտվող
մագնիսական դաշտի արագությանը`![]() ապա
սահքը կդառնա բացասական, իսկ ռոտորի փաթույթի էլշու-ն և հոսանքի ակտիվ բաղադրիչը
կփոխեն իրենց նշանները: Արդյունքում, ռոտորի վրա գործող էլեկտրամագնիսական մոմենտը
նույնպես կփոխի իր ուղղությունը և պտտողից կդառնա արգելակող (առաջնային շարժիչի
պտտող մոմենտի նկատմամբ): Այս պայմաններում, ասինխրոն մեքենան շարժիչային ռեժիմից
կանցնի գեներատորային ռեժիմին փոխակերպելով, արդեն, առաջնային շարժիչի մեխանիկական
էներգիան` էլեկտրական էներգիայի:
ապա
սահքը կդառնա բացասական, իսկ ռոտորի փաթույթի էլշու-ն և հոսանքի ակտիվ բաղադրիչը
կփոխեն իրենց նշանները: Արդյունքում, ռոտորի վրա գործող էլեկտրամագնիսական մոմենտը
նույնպես կփոխի իր ուղղությունը և պտտողից կդառնա արգելակող (առաջնային շարժիչի
պտտող մոմենտի նկատմամբ): Այս պայմաններում, ասինխրոն մեքենան շարժիչային ռեժիմից
կանցնի գեներատորային ռեժիմին փոխակերպելով, արդեն, առաջնային շարժիչի մեխանիկական
էներգիան` էլեկտրական էներգիայի:
Գեներատորային ռեժիմում ասինխրոն մեքենայի սահքը, տեսականորեն, կարող է փոխվել հետևյալ միջակայքում`
![]()
իսկ ռոտորի արագությունը`
![]() :
:
Նշենք,
նաև, որ առաջնային հոսանքի և հզորության ակտիվ բաղադրիչները նույնպես կփոխեն իրենց
նշանները ![]()

Այսպիսով, ասինխրոն գեներատորը սպառում է ցանցից ռեակտիվ էներգիա` վերադարձնելով նրան առաջնային շարժիչի մեխանիկական էներգիայի փոխակերպման հետևանքով ստացված ակտիվ էներգիան: Ընդ որում, ասինխրոն գեներատորի կողմից սպառվող ռեակտիվ հզորության մեծությունը կազմում է մեքենայի անվանական հզորության մոտ 25…45%-ը: Այդպիսի զգալի ռեակտիվ հզորության սպառումը ասինխրոն գեներատորների էական թերություններից մեկն է:
3) Էլեկտրամագնիսական արգելակման ռեժիմ (նկ.2.13, գ ): Այս ռեժիմում ցանցին միացված ասինխրոն մեքենայի ռոտորը պտտվում է պտտվող մագնիսական դաշտին հակառակ ուղղությամբ: Արգելակման ռեժիմում ասինխրոն մեքենայի սահքը, տեսականորեն, կարող է փոխվել հետևյալ միջակայքում`
![]() :
:
Քանի որ ինչպես շարժիչային, այնպես էլ արգելակման ռեժիմում s > 0-ից, ապա երկրորդային հոսանքի ակտիվ և ռեակտիվ բաղադրիչներն արգելակման ռեժիմում ունեն նույն նշանները, ինչ որ շարժիչներում: Դա նշանակում է, որ արգելակման ռեժիմում մեքենան սպառում է ցանցից ակտիվ հզորություն և զարգացնում է պտտվող դաշտի ուղղությամբ գործող էլեկտրամագնիսական մոմենտ: Բայց քանի որ ռոտորը պտտվում է հակառակ ուղղությամբ, այդ մոմենտի ազդեցությունը ռոտորի վրա դառնում է արգելակող:
Գործնականում,
այս ռեժիմն օգտագործվում է այսպես կոչված «հակամիացման» միջոցով ասինխրոն
շարժիչներն արագ արգելակելու և կանգնեցնելու համար: Օրինակ, մի շարք դեպքերում,
ասինխրոն շարժիչն արագ կանգնեցնելու համար ցանկացած երկու` շարժիչը սնուցող,
հաղորդալարերի փոխարկումով, փոփոխում են ֆազերի հաջորդականությունը և պտտվող
դաշտի ուղղությունը: Ռոտորն իներցիայով դեռ որոշ ժամանակ պտտվում է նախկին
ուղղությամբ, այժմ արդեն դաշտին հակառակ: ![]() -ի
դեպքում անհրաժեշտ է մեքենան անջատել ցանցից: Չանջատելու դեպքում շարժիչը կսկսի
պտտվել հակառակ ուղղությամբ: Նույն կերպ կարելի է իրագործել շարժիչի ռեվերսը
(պտտման ուղղության փոփոխությունը), միայն այդ դեպքում, բնական է,
-ի
դեպքում անհրաժեշտ է մեքենան անջատել ցանցից: Չանջատելու դեպքում շարժիչը կսկսի
պտտվել հակառակ ուղղությամբ: Նույն կերպ կարելի է իրագործել շարժիչի ռեվերսը
(պտտման ուղղության փոփոխությունը), միայն այդ դեպքում, բնական է, ![]() -ի դեպքում շարժիչը չպետք է անջատել
ցանցից:
-ի դեպքում շարժիչը չպետք է անջատել
ցանցից:
2.8. Ասինխրոն շարժիչի կորուստները և օ.գ.գ.-ն
Ասինխրոն շարժիչը սպառում է ցանցից ակտիվ հզորություն (նկ.2.14)`
![]()
Այդ հզորության մի մասը վերածվում է առաջնային փաթույթի ակտիվ դիմադրությունում էլեկտրական կորուստների`
![]()
իսկ մյուս
մասը` մեքենայի պողպատում (մագնիսական) կորուստների` ![]() : Դրանք հիմնականում ստատորի պողպատում կորուստներն
են, քանի որ ռոտորի պողպատի (մագնիսական) կորուստներն անտեսվում են`
: Դրանք հիմնականում ստատորի պողպատում կորուստներն
են, քանի որ ռոտորի պողպատի (մագնիսական) կորուստներն անտեսվում են`
![]()
Հզորության մնացած մասն
էլեկտրամագնիսական հզորությունն է ![]() ,
որը մագնիսական դաշտի միջոցով հաղորդվում է ստատորից ռոտորին`
,
որը մագնիսական դաշտի միջոցով հաղորդվում է ստատորից ռոտորին`
![]()
Փոխարինման
սխեմայում ![]() հզորությանը համապատասխանում է
հզորությանը համապատասխանում է ![]() դիմադրությունում անջատվող հզորությունը`
դիմադրությունում անջատվող հզորությունը`

Այդ հզորության մի մասը վերածվում է երկրորդային փաթույթի ակտիվ դիմադրությունում էլեկտրական կորուստների`
![]()
Դժվար չէ կռահել, որ`
![]()
Ռոտորի
միջուկում մագնիսական կորուստները ![]() բավականին
փոքր են (
բավականին
փոքր են (![]() -ի փոքր լինելու պատճառով) և, շատ հաճախ
(ինչպես արդեն նշել ենք), անտեսվում են:
-ի փոքր լինելու պատճառով) և, շատ հաճախ
(ինչպես արդեն նշել ենք), անտեսվում են: ![]() հզորության
մնացած մասը փոխակերպվում է
հզորության
մնացած մասը փոխակերպվում է ![]() մեխանիկական
հզորության, որը զարգացվում է ռոտորի վրա`
մեխանիկական
հզորության, որը զարգացվում է ռոտորի վրա`
![]()
(2.44) և (2.46) արտահայտությունների հիման վրա`

![]() մեխանիկական
հզորության մի մասը ծախսվում է մեքենայի ներսում մեխանիկական կորուստների
մեխանիկական
հզորության մի մասը ծախսվում է մեքենայի ներսում մեխանիկական կորուստների ![]() (օդափոխման, առանցքակալներում շփման վրա
և այլն), մի մասն էլ` լրացուցիչ կորուստների
(օդափոխման, առանցքակալներում շփման վրա
և այլն), մի մասն էլ` լրացուցիչ կորուստների ![]() վրա:
Վերջիններս պայմանավորված են մագնիսական դաշտերի բարձր հարմոնիկներով:
վրա:
Վերջիններս պայմանավորված են մագնիսական դաշտերի բարձր հարմոնիկներով:
Օգտակար հզորությունը լիսեռի վրա`
![]()
Շարժիչի օ.գ.գ.-ն`

Գումարային կորուստները`
![]()
Այսպիսով`

Շարժիչի
օ.գ.գ.-ն անվանական բեռի դեպքում տատանվում է հետևյալ սահմաններում` ![]()
Նկ.2.14-ում պատկերված է ասինխրոն շարժիչի էներգետիկ դիագրամը:
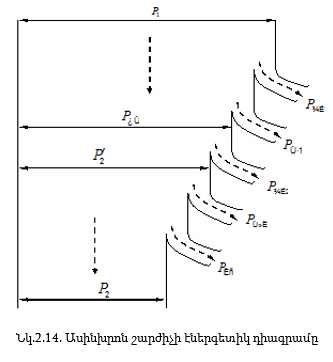
2.9. Ասինխրոն մեքենայի էլեկտրամագնիսական մոմենտը
Ասինխրոն մեքենայի էլեկտրամագնիսական մոմենտը կարելի է որոշել հետևյալ հարաբերությամբ`
![]()
որտեղ ![]() -ը մեքենայի էլեկտրամագնիսական
հզորությունն է,
-ը մեքենայի էլեկտրամագնիսական
հզորությունն է,![]() -ը պտտող մագնիսական
դաշտի անկյունային արագությունը`
-ը պտտող մագնիսական
դաշտի անկյունային արագությունը`

Հաշվի առնելով (2.45) և (2.46) արտահայտությունները`

Համաձայն թ-աձև փոխարինման սխեմայի`

և

Այսինքն,
էլեկտրամագնիսական մոմենտը ցանկացած տրված սահքի դեպքում համեմատական է ![]() լարման քառակուսուն և փոքրանում է
լարման քառակուսուն և փոքրանում է ![]() -ի և
-ի և ![]() -ի
մեծացմանը զուգընթաց:
-ի
մեծացմանը զուգընթաց:
![]() կախվածությունը, երբ
կախվածությունը, երբ ![]() անվանում են ասինխրոն մեքենայի մեխանիկական
բնութագիր:
անվանում են ասինխրոն մեքենայի մեխանիկական
բնութագիր: ![]() -ի փոխարեն աբսցիսների
առանցքի վրա կարելի է տեղադրել
-ի փոխարեն աբսցիսների
առանցքի վրա կարելի է տեղադրել ![]() -ը:
-ը:
Համաձայն
(2.57)-ի` s >0 դեպքում,
M>0 (շարժիչային և արգելակման ռեժիմ), իսկ s <0 դեպքում, M<0
(գեներատորային ռեժիմ): Դժվար չէ ապացուցել նաև, որ երբ s =0, ապա M=0: Վերջապես, երբ ![]() M=0:
M=0:
Քանի որ, s =0 և ![]() դեպքում
M=0, ապա, բնական է, որ մոմենտի առավելագույն արժեքը
դեպքում
M=0, ապա, բնական է, որ մոմենտի առավելագույն արժեքը ![]() գտնվում է այդ կետերի միջև:
գտնվում է այդ կետերի միջև:
Նկ.2.15-ում պատկերված է ասինխրոն շարժիչի մեխանիկական բնութագիրը:
Նշենք
նաև, որ անվանական սահքը, սովորաբար, փոփոխվում է հետևյալ սահմաններում` ![]() :
:
Էլեկտրամագնիսական
մոմենտը հասնում է ![]() բացասական
և դրական արժեքներին, որոշակի
բացասական
և դրական արժեքներին, որոշակի ![]() սահքերի
դեպքում, որոնք կոչվում են կրիտիկական սահքեր:
սահքերի
դեպքում, որոնք կոչվում են կրիտիկական սահքեր:
s
=0-ից մինչև ![]() արժեքը մոմենտն աճում է, իսկ սահքի հետագա
մեծացման հետ միասին մոմենտը փոքրանում է: Դա բացատրվում է նրանով, որ սահքի
մեծացման հետ
արժեքը մոմենտն աճում է, իսկ սահքի հետագա
մեծացման հետ միասին մոմենտը փոքրանում է: Դա բացատրվում է նրանով, որ սահքի
մեծացման հետ ![]() հոսանքն իր բնույթով դառնում է շատ ավելի
ինդուկտիվ: Ընդ որում,
հոսանքն իր բնույթով դառնում է շատ ավելի
ինդուկտիվ: Ընդ որում, ![]() -ի
ակտիվ բաղադրիչը, որը որոշում է M-ի մեծությունը s -ի մեծացման դեպքում սկզբում աճում է
-ի
ակտիվ բաղադրիչը, որը որոշում է M-ի մեծությունը s -ի մեծացման դեպքում սկզբում աճում է ![]() -ի հետ միասին, իսկ հետո սկսում է նվազել, չնայած
-ի հետ միասին, իսկ հետո սկսում է նվազել, չնայած
![]() - ի մեծացմանը:
- ի մեծացմանը:
Նշենք
նաև, որ s -ի
մեծացման հետ միասին մեծանում է ![]() -ը,
առաջնային շղթայում լարման անկումը, իսկ
-ը,
առաջնային շղթայում լարման անկումը, իսկ ![]() էլշու-ն
ու
էլշու-ն
ու ![]() հոսքը որոշ չափով փոքրանում են: Չպետք է
մոռանալ, որ ստատորի վրա գործում է նույնպիսի պտտվող մոմենտ, ինչպիսին և ռոտորի
վրա, բայց ուղղված հակառակ կողմը: Այդ մոմենտն ընդունվում է մեքենան հիմքին
ամրացնող դետալների կողմից:
հոսքը որոշ չափով փոքրանում են: Չպետք է
մոռանալ, որ ստատորի վրա գործում է նույնպիսի պտտվող մոմենտ, ինչպիսին և ռոտորի
վրա, բայց ուղղված հակառակ կողմը: Այդ մոմենտն ընդունվում է մեքենան հիմքին
ամրացնող դետալների կողմից:
Մեխանիկական բնութագրի էքստրեմումները կարելի է գտնել հավասարացնելով`
![]() :
:
Այդ դեպքում կրիտիկական սահքը ստացվում է`

Տեղադրելով ![]() -ն մոմենտի բանաձևի մեջ` կորոշենք
մեքենայի առավելագույն մոմենտը`
-ն մոմենտի բանաձևի մեջ` կորոշենք
մեքենայի առավելագույն մոմենտը`

Դրական նշանը վերաբերում է շարժիչային ռեժիմին, իսկ բացասականը` գեներատորայինին:
Ասինխրոն
մեքենաներում ![]() -ը համեմատաբար փոքր է, և այն կարելի է անտեսել:
Այդ դեպքում`
-ը համեմատաբար փոքր է, և այն կարելի է անտեսել:
Այդ դեպքում`
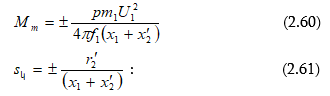
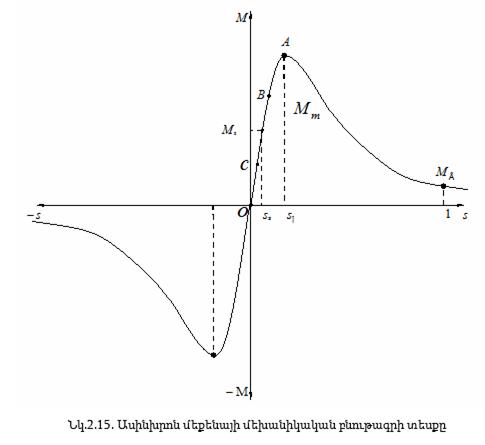
Այսպիսով, առավելագույն մոմենտը համեմատական է լարման քառակուսուն, հակադարձ համեմատական է ցրման ինդուկտիվ դիմադրություններին: (2.60)-ից հետևում է նաև, որ առավելագույն մոմենտը գեներատորային ռեժիմում ավելի մեծ է քան շարժիչայինում:
Անվանական լարման դեպքում առավելագույն մոմենտի պատիկությունը (գերբեռնման ընդունակությունը)`
![]()
կրիտիկական սահքը`
![]()
Եթե էլեկտրամագնիսական մոմենտի բանաձևի մեջ տեղադրենք s =1, ապա կստանանք մոմենտի արժեքը թողարկման պահին, այսինքը թողարկման մոմենտը`

Թողարկման մոմենտը նույնպես համեմատական է լարման քառակուսուն: Թողարկման մոմենտի պատիկությունը`
![]()
Թողարկման հոսանքի պատիկությունը`

2.10. Ասինխրոն շարժիչի կայուն աշխատանքի պայմանները
Ասինխրոն
շարժիչի աշխատանքի հաստատված (կայուն) ռեժիմում ![]()
![]()
M -ը պտտող էլեկտրամագնիսական մոմենտն է ![]() -ն արտադրական մեխանիզմի (կամ ստատիկ) մոմենտը:
-ն արտադրական մեխանիզմի (կամ ստատիկ) մոմենտը:
Աշխատանքի կայունացված ռեժիմում անվանական բեռի տակ (նկ.2.15)`

Պարզության
նպատակով նկ.2.15-ում ցույց չի տրված շարժիչի կողմից պտտման մեջ դրվող արտադրական
մեխանիզմի` ![]() մեխանիկական բնութագիրը:
մեխանիկական բնութագիրը:
Ենթադրենք,
որ շարժիչն աշխատում էր անվանական ռեժիմում ![]() և,
այժմ տեղի է ունեցել ստատիկ մոմենտի մեծացում (բեռի մեծացում): Այդ դեպքում կստացվի`
և,
այժմ տեղի է ունեցել ստատիկ մոմենտի մեծացում (բեռի մեծացում): Այդ դեպքում կստացվի`
![]() և
ռոտորի պտտման արագությունը կսկսի փոքրանալ (s -ը կմեծանա): Բայց դա կբերի M-ի
մեծացմանը, մինչև որ այն հավասարվի ստատիկ մոմենտին: Դրանից հետո շարժիչի
աշխատանքի ռեժիմը նորից կդառնա կայուն, արդեն նոր M-ի և s-ի արժեքների դեպքում (նկ.15 B կետ):
և
ռոտորի պտտման արագությունը կսկսի փոքրանալ (s -ը կմեծանա): Բայց դա կբերի M-ի
մեծացմանը, մինչև որ այն հավասարվի ստատիկ մոմենտին: Դրանից հետո շարժիչի
աշխատանքի ռեժիմը նորից կդառնա կայուն, արդեն նոր M-ի և s-ի արժեքների դեպքում (նկ.15 B կետ):
Ստատիկ
մոմենտի փոքրացման դեպքում` ![]() և
ռոտորի պտտման արագությունը կսկսի մեծանալ (s -ը կփոքրանա): Դա կբերի M -ի
փոքրացմանը մինչև որ այն հավասարվի ստատիկ մոմենտին, իհարկե, նոր M -ի և s-ի արժեքների դեպքում (նկ.2.15. C կետ)
և շարժիչի աշխատանքը նորից կդառնա կայուն:
և
ռոտորի պտտման արագությունը կսկսի մեծանալ (s -ը կփոքրանա): Դա կբերի M -ի
փոքրացմանը մինչև որ այն հավասարվի ստատիկ մոմենտին, իհարկե, նոր M -ի և s-ի արժեքների դեպքում (նկ.2.15. C կետ)
և շարժիչի աշխատանքը նորից կդառնա կայուն:
Այսպիսով,
եթե ![]() ապա շարժիչի աշխատանքը կայուն է: Այժմ ուսումնասիրենք
շարժիչի աշխատանքը, երբ
ապա շարժիչի աշխատանքը կայուն է: Այժմ ուսումնասիրենք
շարժիչի աշխատանքը, երբ ![]()
Ենթադրենք`

և, արդեն տեղի է ունեցել բեռի մեծացում: Բնական է, որ ռոտորի պտտման արագությունը կփոքրանա (սահքը կմեծանա, M մոմենտը կփոքրանա), իսկ դա կբերի սահքի հետագա մեծացմանը և այսպես շարունակ, մինչև որ սահքը կհավասարվի մեկի (s = 1), այսինքն` ռոտորը կանգ կառնի:
Այսպիսով, ասինխրոն շարժիչի կայուն աշխատանքի համար անհրաժեշտ է, որ անվանական մոմենտը փոքր լինի առավելագույն մոմենտից`
![]()
այսինքն`
![]()
Անհրաժեշտ
է ուշադրություն դարձնել նաև այն փաստին, որ ասինխրոն շարժիչի աշխատանքը ![]() սահքերի դեպքում առավել շահավետ է, քանի
որ փոքր սահքի արժեքները պայմանավորում են ռոտորի փաթույթում փոքր էլեկտրական
կորուստներ
սահքերի դեպքում առավել շահավետ է, քանի
որ փոքր սահքի արժեքները պայմանավորում են ռոտորի փաթույթում փոքր էլեկտրական
կորուստներ ![]() և, համեմատաբար` մեծ օ.գ.գ.:
և, համեմատաբար` մեծ օ.գ.գ.:
2.11. Ցանցի լարման և ռոտորի փաթույթի ակտիվ դիմադրության
ազդեցությունն ասինխրոն շարժիչի մեխանիկական բնութագրի վրա
Ինչպես
արդեն նշել ենք, ասինխրոն շարժիչի էլեկտրամագնիսական մոմենտը, ինչպես նաև մոմենտի
առավելագույն և թողարկման արժեքները համեմատական են լարման քառակուսուն: Մյուս
կողմից կրիտիկական սահքի մեծությունը կախված չէ ![]() -ից:
Այս դիտողությունները մեզ հնարավորություն են տալիս կառուցել մեխանիկական
բնութագրերը տարբեր լարումների համար (նկ.2.16):
-ից:
Այս դիտողությունները մեզ հնարավորություն են տալիս կառուցել մեխանիկական
բնութագրերը տարբեր լարումների համար (նկ.2.16):
Նկ.2.16-ից
երևում է, որ տարբեր լարումների դեպքում փոփոխվում են ոչ միայն առավելագույն և
թողարկման մոմենտները, այլև (որոշակի ![]() ստատիկ
մոմենտի արժեքի դեպքում) ռոտորի պտտման արագությունը
ստատիկ
մոմենտի արժեքի դեպքում) ռոտորի պտտման արագությունը ![]()
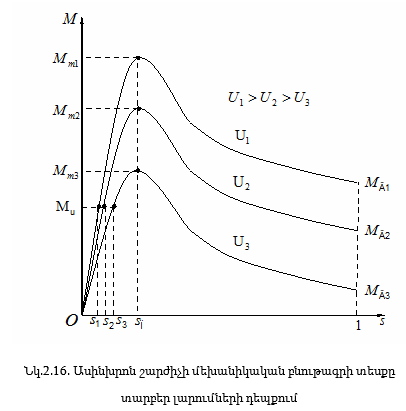
Առավելագույն
մոմենտի բանաձևից երևում է, որ այն կախված չէ ռոտորի փաթույթի ակտիվ ![]() դիմադրությունից: Ինչ վերաբերում է
կրիտիկական սահքին, ապա
դիմադրությունից: Ինչ վերաբերում է
կրիտիկական սահքին, ապա ![]() -ն
համեմատական է
-ն
համեմատական է ![]()
Այսպիսով,
եթե ասինխրոն շարժիչում ռոտորի փաթույթի ակտիվ դիմադրությունը մեծացվի, ապա ![]() -ն կմեծանա,
-ն կմեծանա, ![]() -ը կմնա անփոփոխ: Ինչ վերաբերում է
թողարկման մոմենտին, ապա այն կմեծանա մինչև մի որոշակի արժեք
-ը կմնա անփոփոխ: Ինչ վերաբերում է
թողարկման մոմենտին, ապա այն կմեծանա մինչև մի որոշակի արժեք ![]() , որից հետո
, որից հետո ![]() -ի մեծացումը կբերի թողարկման մոմենտի
փոքրացմանը (նկ.2.17):
-ի մեծացումը կբերի թողարկման մոմենտի
փոքրացմանը (նկ.2.17):

Նկ.2.17-ից
երևում է, որ ![]() -ի մեծացումը (որոշակի
-ի մեծացումը (որոշակի ![]() ստատիկ մոմենտի արժեքի դեպքում) բերում է
ռոտորի պտտման արագության փոփոխությանը
ստատիկ մոմենտի արժեքի դեպքում) բերում է
ռոտորի պտտման արագության փոփոխությանը ![]()
2.12. Ասինխրոն շարժիչի աշխատանքային բնութագրերը
Ասինխրոն
շարժիչի աշխատանքային բնութագրերը ![]() հզորության,
հզորության, ![]() հոսանքի,
հոսանքի, ![]() հզորության
գործակցի,
հզորության
գործակցի, ![]() լիսեռի վրա մոմենտի,
լիսեռի վրա մոմենտի,![]() ռոտորի պտտման արագության և
ռոտորի պտտման արագության և ![]() օ.գ.գ.-ի կախվածությունն է
օ.գ.գ.-ի կախվածությունն է ![]() օգտակար հզորությունից (նկ.2.18.)
անվանական լարման և հաճախության դեպքում:
օգտակար հզորությունից (նկ.2.18.)
անվանական լարման և հաճախության դեպքում:
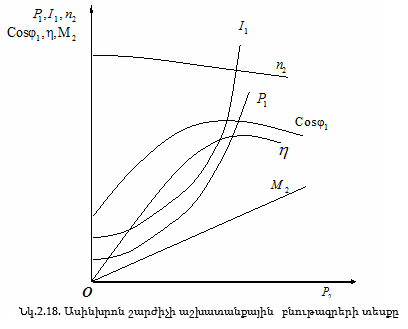
Բեռի
մեծացմանը զուգընթաց մեծանում են ![]() և
և
![]() -ը:
-ը: ![]() և
և ![]() -ը
հասնում են իրենց առավելագույն արժեքներին
-ը
հասնում են իրենց առավելագույն արժեքներին ![]() դեպքում:
Պարապ ընթացքի ժամանակ
դեպքում:
Պարապ ընթացքի ժամանակ ![]()
![]() իսկ մյուս մեծությունները ստանում են
իրենց փոքրագույն արժեքները: Եթե ընդունենք, որ
իսկ մյուս մեծությունները ստանում են
իրենց փոքրագույն արժեքները: Եթե ընդունենք, որ ![]() ապա
ապա
![]() կստացվի ուղիղի գիծ: Համեմատաբար մեծ
բեռների դեպքում,
կստացվի ուղիղի գիծ: Համեմատաբար մեծ
բեռների դեպքում, ![]() սկսում
է փոքրանալ, քանի որ մեծանում է
սկսում
է փոքրանալ, քանի որ մեծանում է ![]() -ը:
-ը:
2.13. Ասինխրոն շարժիչի պարապ ընթացքի և կարճ միացման փորձերը
ա) Պարապ ընթացքի փորձը:
Այս
դեպքում շարժիչը միացված է ցանցին, իսկ նրա լիսեռի վրա բեռը բացակայում է ![]() դեպքում չափում են պարապ ընթացքի հոսանքը
դեպքում չափում են պարապ ընթացքի հոսանքը ![]() և հզորությունը
և հզորությունը ![]() որից հետո որոշում են հզորության գործակիցը`
որից հետո որոշում են հզորության գործակիցը`

որտեղ ![]() -ը և
-ը և ![]() -ն
համապատասխանաբար մատուցվող լարման և պարապ ընթացքի հոսանքի ֆազային արժեքներն են:
-ն
համապատասխանաբար մատուցվող լարման և պարապ ընթացքի հոսանքի ֆազային արժեքներն են:
![]() և
և
![]() -ի արժեքների ավելի ճշգրիտ որոշումների
համար կառուցում են
-ի արժեքների ավելի ճշգրիտ որոշումների
համար կառուցում են ![]() կախվածությունը
(նկ.2.19):
կախվածությունը
(նկ.2.19): ![]() լարումը, սովորաբար, փոփոխում են
լարումը, սովորաբար, փոփոխում են ![]() մինչև
մինչև ![]() սահմաններում:
սահմաններում:
Նշենք, որ
![]() հզորության գործակիցը լարման մեծացման
դեպքում հագեցման պատճառով փոքրանում է, իսկ
հզորության գործակիցը լարման մեծացման
դեպքում հագեցման պատճառով փոքրանում է, իսկ ![]() հզորությունը
մեծանում է, գործնականում, լարման քառակուսուն համեմատական:
հզորությունը
մեծանում է, գործնականում, լարման քառակուսուն համեմատական:
բ) Կարճ միացման փորձը:
Կարճ
միացման փորձը կատարվում է, երբ երկրորդային փաթույթը կարճ է միացված, իսկ ռոտորն
արգելակված է: Ստատորի փաթույթին մատուցվում է այնպիսի ցածրացված լարում, որ ֆազային հոսանքը ![]() չգերազանցի
չգերազանցի ![]() հոսանքի արժեքը: Այս փորձի ժամանակ հանում
են
հոսանքի արժեքը: Այս փորձի ժամանակ հանում
են ![]() կախվածությունները (նկ.2.20):
կախվածությունները (նկ.2.20):
Ընդ որում`

Քանի որ
կարճ միացման փորձը կատարվում է ցածրացված լարման դեպքում, ապա շարժիչի մագնիսական
շղթան հագեցած չէ և ![]()
![]() հոսանքը լարումից կախված փոխվում է
գծայնորեն: Կարճ միացման
հոսանքը լարումից կախված փոխվում է
գծայնորեն: Կարճ միացման ![]() հզորությունը
ծախսվում է հիմնականում ստատորի և ռոտորի փաթույթներում էլեկտրական կորուստների վրա:
հզորությունը
ծախսվում է հիմնականում ստատորի և ռոտորի փաթույթներում էլեկտրական կորուստների վրա:
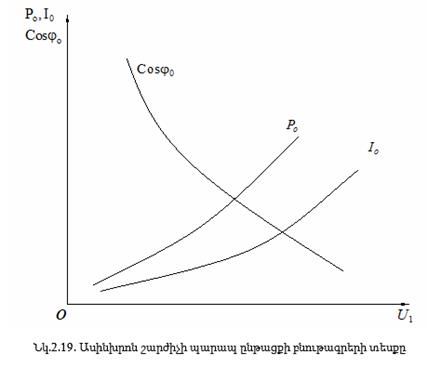
Պողպատում կորուստները կարելի է անտեսել, քանի որ դրանք համեմատական են լարման քառակուսուն, իսկ լարումը կարճ միացման փորձի ժամանակ բավականաչափ փոքր է:
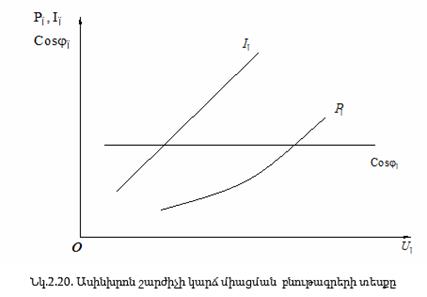
2.14. Ասինխրոն շարժիչի թողարկումը
Ասինխրոն շարժիչների թողարկման (գործարկման) հնարավոր եղանակների դիտարկման ժամանակ անհրաժեշտ է հաշվի առնել հետևյալը`
1) շարժիչը թողարկման ժամանակ պետք է զարգացնի այնպիսի թողարկման մոմենտ, որը բավարար լինի շարժիչի ռոտորը պտտելու համար,
2) թողարկման հոսանքը պետք է սահմանափակված լինի այնպիսի արժեքով, որպեսզի տեղի չունենա շարժիչի վնասում և ցանցի նորմալ աշխատանքային ռեժիմի խախտում,
3) թողարկման սխեման պետք է լինի հնարավորին չափ պարզ, իսկ թողարկման սարքավորման քանակը և արժեքը` փոքր:
Ա. Կարճ միացված ռոտորով ասինխրոն շարժիչի թողարկումը
1) Ուղիղ թողարկում (նկ.2.21, ա):
Այս դեպքում ստատորի փաթույթն անմիջապես միացվում է ցանցին (անվանական լարմանը):
Թողարկման հոսանքն այդ դեպքում`
![]()
Եթե ցանցը բավականաչափ հզոր է, և շարժիչի թողարկման հոսանքը չի առաջացնում ցանցում անթույլատրելի լարման անկում, ապա ուղիղ թողարկումը հնարավոր է:
Դրականն այստեղ` թողարկման պարզությունն է:
2) Ռեակտորային թողարկում:
Այս թողարկումն իրագործվում է ըստ 2.21,բ սխեմայի:
Այս
դեպքում սկզբից միացվում է B1 անջատիչը և շարժիչն եռաֆազ ռեակտորի
(ինդուկտիվ կոճ) միջոցով ցանցից սնուցում է ստանում: Ռեակտորի ![]() դիմադրությունը սահմանափակում է թողարկման
հոսանքի մեծությունը: Երբ շարժիչը հասնում է իր նորմալ արագությանը, միացվում է B2
անջատիչիը, որը շունտում է ռեակտորին և շարժիչին մատուցվում է ցանցի լարումը:
դիմադրությունը սահմանափակում է թողարկման
հոսանքի մեծությունը: Երբ շարժիչը հասնում է իր նորմալ արագությանը, միացվում է B2
անջատիչիը, որը շունտում է ռեակտորին և շարժիչին մատուցվում է ցանցի լարումը:
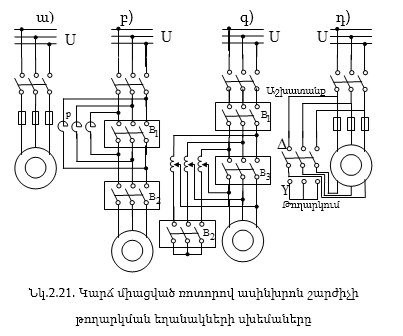
3) Ավտոտրանսֆորմատորային թողարկում:
Այս թողարկումն իրագործվում է ըստ 2.21,գ սխեմայի:
Սկզբում միացվում են B1 և B2 անջատիչները, և AT ավտոտրանսֆորմատորի միջոցով շարժիչին տրվում է իջեցված լարում: Շարժիչի որոշակի արագության հասնելուց հետո B2 անջատիչն անջատվում է, և շարժիչը սնումը ստանում է AT ավտոտրանսֆորմատորի փաթույթի մի մասից, որն այդ դեպքում աշխատում է որպես ռեակտոր: Այնուհետև միացվում է B3 անջատիչը, որի հետևանքով շարժիչը ստանում է լրիվ լարում:
4) Թողարկում ![]() փոխարկման միջոցով:
փոխարկման միջոցով:
Այս թողարկումը իրագործվում է ըստ 2.21,դ սխեմայի:
Այսպիսի
թողարկումը հնարավոր է այն դեպքերում, երբ ստատորի փաթույթի բոլոր վեց ծայրերը
հանված են և շարժիչը նորմալ աշխատում է ստատորի փաթույթի ![]() -աձև միացման ժամանակ:
-աձև միացման ժամանակ:
Թողարկման
ժամանակ ստատորի փաթույթը միացվում է Y-աձև, և, երբ ռոտորը հավաքում է իր
արագությունը, փաթույթի միացումը փոխարկվում է ![]() -աձևի:
Այսպիսի թողարկման դեպքում, ուղիղ թողարկման համեմատ, փաթույթի ֆազերի լարումը
փոքրանում է
-աձևի:
Այսպիսի թողարկման դեպքում, ուղիղ թողարկման համեմատ, փաթույթի ֆազերի լարումը
փոքրանում է ![]() անգամ, թողարկման մոմենտը`
անգամ, թողարկման մոմենտը` ![]() անգամ, փաթույթի ֆազերում թողարկման
հոսանքը փոքրանում է
անգամ, փաթույթի ֆազերում թողարկման
հոսանքը փոքրանում է ![]() անգամ:
անգամ:
Այսպիսի թողարկման հիմնական թերությունը (2-րդ և 3-րդ եղանակների համեմատ) այն է, որ փոխարկումների ժամանակ շարժիչի շղթան խզվում է, իսկ դա կարող է բերել գերլարումների առաջացմանը:
Բ. Ֆազային ռոտորով ասինխրոն շարժիչի թողարկումը
Այս
շարժիչների թողարկման հոսանքը կարելի է փոքրացնել ռոտորի շղթայում լրացուցիչ ակտիվ
![]() դիմադրություն մտցնելու մրջոցով: Ընդ
որում, վերոնշված եղանակով հնարավոր է ոչ միայն փոքրացնել թողարկման հոսանքը, այլև
մեծացնել (որոշակի սահմաններում) թողարկման
դիմադրություն մտցնելու մրջոցով: Ընդ
որում, վերոնշված եղանակով հնարավոր է ոչ միայն փոքրացնել թողարկման հոսանքը, այլև
մեծացնել (որոշակի սահմաններում) թողարկման ![]() մոմենտը
:
մոմենտը
:
Ռոտորի շղթային ընդհանուր ակտիվ դիմադրությունը այս դեպքում կլինի`
![]()
Թողարկման
մոմենտի բանաձևում (2.62) ![]() փոխարեն
տեղադրելով ռոտորի շղթայի ընդհանուր ակտիվ
փոխարեն
տեղադրելով ռոտորի շղթայի ընդհանուր ակտիվ ![]() դիմադրությունը
և տալով
դիմադրությունը
և տալով ![]() տարբեր արժեքներ` կարելի է կառուցել
տարբեր արժեքներ` կարելի է կառուցել ![]() կախվածությունը (նկ.2.22):
կախվածությունը (նկ.2.22):
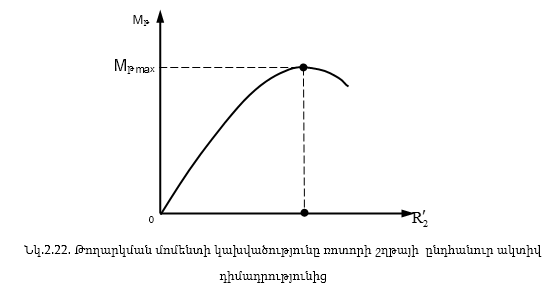
Դժվար չէ նկատել,
որ ![]() կախվածության տեսքին կարելի էր հանգել նաև
օգտվելով նկ.2.17-ից: .
կախվածության տեսքին կարելի էր հանգել նաև
օգտվելով նկ.2.17-ից: . ![]() -ի ընտրումը կախված է բեռի մոմենտի
մեծությունից: Օրինակ, համեմատաբար մեծ բեռի մոմենտի դեպքում
-ի ընտրումը կախված է բեռի մոմենտի
մեծությունից: Օրինակ, համեմատաբար մեծ բեռի մոմենտի դեպքում ![]() -ը պետք է լինի այնպիսին, որպեսզի ապահովվի
հնարավորին մեծ թողարկման մոմենտ: Համեմատաբար փոքր բեռի մոմենտի դեպքում
-ը պետք է լինի այնպիսին, որպեսզի ապահովվի
հնարավորին մեծ թողարկման մոմենտ: Համեմատաբար փոքր բեռի մոմենտի դեպքում ![]() -ը ընտրելիս կարելի է արդեն հիմնական
ուշադրությունը դարձնել թողարկման հոսանքի փոքրացման հնարավորությանը, իհարկե
ապահովելով անհրաժեշտ թողարկման մոմենտը:
-ը ընտրելիս կարելի է արդեն հիմնական
ուշադրությունը դարձնել թողարկման հոսանքի փոքրացման հնարավորությանը, իհարկե
ապահովելով անհրաժեշտ թողարկման մոմենտը:
2.15. Խորը փորակներով և երկվանդակ ասինխրոն շարժիչներ
Կարճ միացված ռոտորով ասինխրոն շարժիչների թողարկման բնութագրերը կարելի է լավացնել` որոշ փոփոխություններ կատարելով ռոտորի կառուցվածքի մեջ: Այդպիսի շարժիչներից մեկը խորը փորակներով ասինխրոն շարժիչն է: Ռոտորի փորակներն արվում են բավականաչափ խորը և դրանց մեջ տեղադրվում են պղնձյա կամ ալյումինե ձողեր, որոնք երկու կողմերից փակված են պղնձյա (ալյումինե) օղակներով:
Թողարկման
պահին, երբ ![]() ձողի ներքևի մասի ինդուկտիվ
դիմադրությունը շատ ավելի մեծ է, քան վերևի մասում, քանի որ ներքևի մասը կապված է
ցրման դաշտի ավելի մեծ թվով ինդուկցիայի գծերի հետ, քան վերևի մասը և,
գործնականում, ամբողջ հոսանքն անցնում է ձողի վերևի մասով (նկ.2.23, “թողարկում”):
Դա համարժեք է ձողի կտրվածքի փոքրացմանը և ռոտորի փաթույթի ակտիվ դիմադրության
մեծացմանը: Վերջինս բերում է մի կողմից թողարկման հոսանքի փոքրացմանը, իսկ մյուս
կողմից` թողարկման մոմենտի մեծացմանը:
ձողի ներքևի մասի ինդուկտիվ
դիմադրությունը շատ ավելի մեծ է, քան վերևի մասում, քանի որ ներքևի մասը կապված է
ցրման դաշտի ավելի մեծ թվով ինդուկցիայի գծերի հետ, քան վերևի մասը և,
գործնականում, ամբողջ հոսանքն անցնում է ձողի վերևի մասով (նկ.2.23, “թողարկում”):
Դա համարժեք է ձողի կտրվածքի փոքրացմանը և ռոտորի փաթույթի ակտիվ դիմադրության
մեծացմանը: Վերջինս բերում է մի կողմից թողարկման հոսանքի փոքրացմանը, իսկ մյուս
կողմից` թողարկման մոմենտի մեծացմանը:
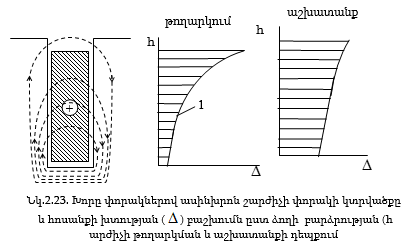
Ռոտորի արագության մեծացմանը զուգահեռ, ռոտորի հոսանքի հաճախությունը փոքրանում է, ձողում հոսանքի բաշխվածությունը դառնում է ավելի հավասարաչափ, ակտիվ դիմադրությունը փոքրանում է, և անվանական ռեժիմում արդեն հոսանքի դուրս մղման ազդեցությունը վերանում է (նկ.2.23, “աշխատանք “) :
Թողարկման ավելի լավ հատկություններ ունեն, այսպես կոչված, երկվանդականի ասինխրոն շարժիչները: Այսպիսի շարժիչի ռոտորն ունի երկու կարճ փակված փաթույթ (վանդակ), (նկ.2.24):
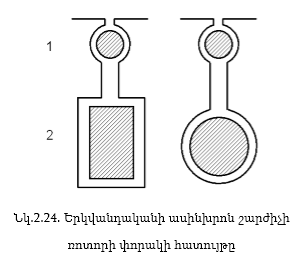
Վերևի (1)
վանդակը թողարկման վանդակն է, իսկ ներքևինը` (2) աշխատանքայինը: Աշխատանքային
վանդակն արվում է լատունից կամ բրոնզից, որոնց տեսակարար դիմադրությունը
համեմատաբար մեծ է: Այդ վանդակի ինդուկտիվ դիմադրությունը մեծ չէ, քանի որ այն
գտնվում է ռոտորի մակերևույթի մոտ և բացի դրանից վերևից ու ներքևից ունի նեղ
անցքեր: Աշխատանքային վանդակը, որն արվում է պղնձից և ավելի մեծ կտրվածքով, ունի
համեմատաբար ավելի փոքր ակտիվ դիմադրություն: Աշխատանքային վանդակի ինդուկտիվ
դիմադրությունը մեծ է ստացվում հատկապես թողարկման ժամանակ, երբ ![]() Շարժիչի թողարկման ժամանակ ռոտորի
հոսանքը հիմնականում անցնում է վերևի վանդակով, որը բերում է թողարկման հոսանքի
փոքրացմանը և մոմենտի մեծացմանը: Ռոտորի արագության մեծացմանը զուգահեռ,
Շարժիչի թողարկման ժամանակ ռոտորի
հոսանքը հիմնականում անցնում է վերևի վանդակով, որը բերում է թողարկման հոսանքի
փոքրացմանը և մոմենտի մեծացմանը: Ռոտորի արագության մեծացմանը զուգահեռ, ![]() -ը փոքրանում է, և երկու վանդակներում էլ հոսանքը
բաշխվում է հավասարաչափ:
-ը փոքրանում է, և երկու վանդակներում էլ հոսանքը
բաշխվում է հավասարաչափ:
2.16. Ասինխրոն շարժիչի արագության կարգավորումը
Շարժիչների արագության կարգավորումը շահագործման տեսակետից կարևորագույն նշանակություն ունի:
Տարբերում են արագության կարգավորման հետևյալ եղանակները`
- արագության կարգավորում ստատորի կողմից,
- արագության կարգավորում ռոտորի կողմից:
Ասինխրոն շարժիչների մոտ ստատորի կողմից արագության կարգավորումը հնարավոր է իրագործել`
1)
փոփոխելով շարժիչին մատուցվող
լարումը ![]() ,
,
2) փոփոխելով զույգ բևեռների թիվը (p),
3)
փոփոխելով ցանցի հաճախությունը
![]() :
:
Շարժիչին մատուցվող լարման փոքրացման դեպքում շարժիչի մոմենտը փոխվում է լարման քառակուսուն համեմատական, փոփոխվում են մեխանիկական բնութագրերը և կախված ստատիկ մոմենտի` սահքից կախվածության տեսքից, կստացվեն տարբեր աշխատանքային սահքեր, հետևաբար, տարբեր արագություններ (նկ. 2.16 ):
Արագության
կարգավորումն այս դեպքում հնարավոր է ![]() սահմաններում:
սահմաններում:
Շարժիչին մատուցվող լարման փոփոխման միջոցով արագության կարգավորումը կիրառվում է հազվադեպ, քանի որ այն հնարավորություն չի տալիս արագությունը կարգավորել լայն միջակայքում և շահավետ չէ:
Քննարկենք զույգ բևեռների թվի փոփոխմամբ արագության կարգավորման գործընթացը:
Ասինխրոն շարժիչի արագությունը`
Դժվար չէ նկատել, որ տրված հաճախության դեպքում, բևեռների թվի փոփոխմամբ արագության կարգավորումը կունենա աստիճանաձև բնույթ:
Բևեռների թիվը կարելի է փոփոխել կամ ստատորի փորակներում տեղադրելով տարբեր բևեռների թվով երկու փաթույթներ, կամ տեղադրել մեկ փաթույթ, որի կառուցվածքը թույլ է տալիս ստանալ տարբեր թվով բևեռներ (փաթույթի միացման սխեմայի փոփոխման ճանապարհով):
Եթե շարժիչը ֆազային ռոտորով է, ապա բևեռների թվի փոխարկումը պետք է կատարել ստատորում և ռոտորում միաժամանակ: Վերջին հանգամանքը հանգեցնում է շարժիչի ռոտորի կառուցվածքի բարդացմանը, որի պատճառով, գործնականում, բևեռների թվի փոփոխմամբ արագության կարգավորումն իրագործում են կարճ միացված ռոտորով ասինխրոն շարժիչներում:
Օրինակի համար պատկերենք քառաբևեռ փաթույթի` երկբևեռի փոխարկման սկզբունքային սխեմաները (մեկ ֆազի համար)` նկ. 2.25: Հաճախության միջոցով շարժիչի արագության կարգավորման դեպքում հնարավոր է արագությունը կարգավորել սահուն և լայն միջակայքում: Սակայն կարգավորման այս եղանակը հնարավոր է, եթե շարժիչը սնվում է հաճախության վերափոխիչի միջոցով:
Վերոհիշյալ եղանակով արագության կարգավորման դեպքում նպատակահարմար է մագնիսական հոսքը պահպանել հաստատուն: Նշենք, որ հոսքի մեծացումն առաջացնում է մագնիսական շղթայի հագեցում և մագնիսացնող հոսանքի մեծացում, իսկ հոսքի փոքրացումը` մեքենայի հնարավորությունների ոչ լրիվ օգտագործում:
Այդ իսկ պատճառով, հաճախության փոփոխման հետ միասին անհրաժեշտ է փոփոխել նաև լարումն այնպես, որ լարման և հաճախության հարաբերությունը մնա հաստատուն`

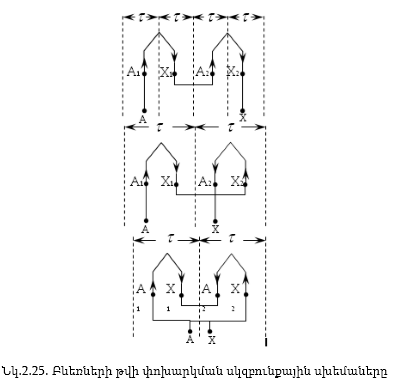
Արագության կարգավորումը ռոտորի կողմից կատարվում է ռոտորի շղթայի ակտիվ դիմադրության փոփոխման միջոցով և կիրառվում է ֆազային ռոտորով ասինխրոն շարժիչներում: Այս դեպքում ռոտորի շղթա է մտցվում կարգավորող ռեոստատ, որի դիմադրության փոփոխությամբ էլ իրագործվում է շարժիչի արագության կարգավորումը (նկ.2.17): Ընդ որում, դիմադրության մեծացումը բերում է ռոտորի պտտման արագության փոքրացմանը:
Կարգավորող ռեոստատը պետք է հաշվարկված լինի աշխատանքային երկարատև ռեժիմի համար, այդ իսկ պատճառով թողարկման ռեոստատները, որոնք հաշվարկվում են կարճատև ռեժիմի համար, չեն կարող ծառայել որպես կարգավորող ռեոստատներ:
Նշենք նաև, որ արագության կարգավորման այդ եղանակը կապված է ռոտորի շղթայում էլեկտրական կորուստների զգալի մեծացման հետ:
1. Копылов И.П. Электрические машины. Учебник для вузов. - М.: Высшая школа, 2004.
2. Кацман М.М. Электрические машины приборных устройств и средств автоматизации. - Академия, 2006.
3. Епифанов А.П. Электрические машины. - Лань, 2006.
4. Вольдек А.И. Электрические машины. - СПБ Питер., 2007.
5. Грищенко А.В. Электрические машины и преобразователи подвижного состава. - Академия, 2005.
6. Торопцев Н.Д. Электрические машины сельскохозяйственного назначения. - Колос, 2005.
7. Беспалов В.Я., Котеленец Н.Ф. Электрические машины. - М.: Академия, 2006.