ՀԱՅԱՍՏԱՆԻ ՀԱՆՐԱՊԵՏՈՒԹՅԱՆ ԿՐԹՈՒԹՅԱՆ ԵՎ ԳԻՏՈՒԹՅԱՆ ՆԱԽԱՐԱՐՈՒԹՅՈՒՆ
ՀԱՅԱՍՏԱՆԻ ԱԶԳԱՅԻՆ ՊՈԼԻՏԵԽՆԻԿԱԿԱՆ ՀԱՄԱԼՍԱՐԱՆ
Էներգետիկայի և էլեկտրատեխնիկայի
ինստիտուտ
Էլեկտրական մեքենաների և
ապարատների ամբիոն
ԱՆԴՐԱՆԻԿ ԹԱՐԻԿԻ ՀՈՎՀԱՆՆԻՍՅԱՆ
ԷԼԵԿՏՐԱԿԱՆ ԵՎ ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐ
ՈՒսումնական ձեռնարկ
ՄԱՍ 2
ԵՐԵՎԱՆ
ՃԱՐՏԱՐԱԳԵՏ
2017
Հովհաննիսյան Անդրանիկ Թարիկի
Հ 854 Էլեկտրական և էլեկտրոնային ապարատներ: Մաս 2: ՈՒսումնական ձեռնարկ / Ա.Թ. Հովհաննիսյան. ՀԱՊՀ.-Եր.: Ճարտարագետ, 2017.- 175 էջ:
ՈՒսումնական ձեռնարկի 2-րդ մասում ներկայացված են էլեկտրոնային ապարատների հիմնական տեսակները, դրանց նշանակությունները, էլեկտրական սխեմաները, աշխատանքի սկզբունքները: Նախատեսված է էլեկտրատեխնիկական մասնագիտությունների ուսանողների և բնագավառում աշխատող մասնագետների համար: Ներառում է 112 նկար և 2 աղյուսակ:
ISBN 978-9939-72-555-0
1.ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻԱՌԱՆՁՆԱՀԱՏԿՈՒԹՅՈՒՆՆԵՐԸ
1.1 ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
1.2. ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻ ԱՌԱՆՁՆԱՀԱՏԿՈՒԹՅՈՒՆՆԵՐԻ ՎԵՐԼՈՒԾՈՒԹՅՈՒՆԸ
1.3. ԷԼԵԿՏՐՈՆԱՅԻՆ ՏԱՐՐԵՐԻ ՄԻԱՑՄԱՆ ՏԱՐԲԵՐԱԿՆԵՐԸ
1.3.1. ԴԻՈԴՆԵՐԻ ԶՈՒԳԱՀԵՌ և ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՈՒՄՆԵՐ
1.3.2. ՏՐԱՆԶԻՍՏՈՐՆԵՐԻ ԶՈՒԳԱՀԵՌ ԵՎ ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՈՒՄՆԵՐԸ
1.4. ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻ ԵՎ ՏԱՐՐԵՐԻՊԱՇՏՊԱՆՈՒԹՅԱՆՄԻՋՈՑՆԵՐԸ
2.ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ԷԼԵԿՏՐՈՆԱՅԻԱՂԲՅՈՒՐՆԵՐ
2.1. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՏԵՍԱԿՆԵՐԸԵՎ ՀԻՄՆԱԿԱՆ ՊԱՐԱՄԵՏՐԵՐԸ
2.2. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՁԵՎԱՎՈՐՄԱՆ ԵՂԱՆԱԿՆԵՐԸ
2.2.1. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՁԵՎԱՎՈՐԻՉՆԵՐ
2.2.2. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ԳԵՆԵՐԱՏՈՐՆԵՐ
3.2. ԱՐԱԳԱԳՈՐԾՈՒԹՅԱՆ ԲԱՐՁՐԱՑՈՒՄԸ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԲԱՆԱԼԻՈՒՄ
4.1. ՄԻԱՍՏԻՃԱՆ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՈՒԺԵՂԱՐԱՐ
4.2.1. ՏՐԱՆՍՖՈՐՄԱՏՈՐՈՅԻՆ ԿԱՊՈՎ ՄԻԱՏԱԿՏ ՀԶՈՐՈՒԹՅԱՆ ՈՒԺԵՂԱՐԱՐ
4.2.2. ԵՐԿՏԱԿՏ ՀԶՈՐՈՒԹՅԱՆ ՈՒԺԵՂԱՐԱՐՆԵՐ
5.1. ԷԼԵԿՏՐՈՆԱՅԻՆ ՌԵԼԵՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
5.2. ԿՈԼԵԿՏՈՐԱՅԻՆ ՀԵՏԱԴԱՐՁ ԿԱՊՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
5.3. ԷՄԻՏԵՐԱՅԻՆ ՀԵՏԱԴԱՐՁ ԿԱՊՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
5.4. ՀԱՄԱԿՑՎԱԾ ՀԵՏԱԴԱՐՁ ԿԱՊԵՐՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
5.5.1. RC ՇՂԹԱՅՈՎ ԷԼԵԿՏՐՈՆԱՅԻՆ ԺԱՄԱՆԱԿԻ ՌԵԼԵ
5.5.2. ԹՎԱՅԻՆ ՏԱՐՐԵՐՈՎ ԺԱՄԱՆԱԿԻ ՌԵԼԵ
6. ԿԱՌԱՎԱՐՄԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԱՊԱՐԱՏՆԵՐ
6.1. ՄԻԱԳՈՐԾՈՂՈՒԹՅԱՆ ԹԻՐԻՍՏՈՐՆԵՐԻ ՀԱՐԿԱԴՐԱԲԱՐ ՓԱԿՄԱՆ ՏԱՐԲԵՐԱԿՆԵՐ
6.2. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԿՈՄՈՒՏԱՏՈՐ
6.3. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԹԻՐԻՍՏՈՐԱՅԻՆ ԹՈՂԱՐԿԻՉ
6.5. ԲԵՌԻ ՀԶՈՐՈՒԹՅԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԿԱՐԳԱՎՈՐԻՉՆԵՐ
7.1. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ՏԱՐՐԵՐԻ ՏԵՍԱԿՆԵՐ
7.2. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ՃԱՆԱՊԱՐՀԱՅԻՆ ԱՆՋԱՏԻՉՆԵՐ
7.3.2. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՕՊՏՐՈՆԱՅԻՆ ՓՈԽԱՆՋԱՏԻՉ
7.3.3. ԼՈՒՍԱՅԻՆ ՀՈՍՔԵՐԻ ՏԱՐԲԵՐՈՒԹՅԱՆ ՖՈՏՈՌԵԼԵ
7.4. ՕՊՏՐՈՆԻ ԿԻՐԱՌՄԱՄԲ ԹԻՐԻՍՏՈՐԱՅԻՆ ԲԱՆԱԼԻ
7.5. ԼԱՐՄԱՆ ԱՐԺԵՔԻ ՀՍԿՄԱՆ ՌԵԼԵՆԵՐ
8. ԷԼԵԿՏՐԱԿԱՆ ԷՆԵՐԳԻԱՅԻ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.1. ԷԼԵԿՏՐԱԿԱՆ ԷՆԵՐԳԻԱՅԻ ԿԵՐՊԱՓՈԽԻՉՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
8.2. ՉԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.2.1. ՄԻԱՖԱԶ ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.2.2. ԵՌԱՖԱԶ ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.3. ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.3.1. ՄԻԱԿԻՍԱՊԱՐԲԵՐԱԿԱՆ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.3.2. ԵՐԿԿԻՍԱՊԱՐԲԵՐԱԿԱՆ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.3.3. ԵՌԱՖԱԶ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.5. ԼԱՐՄԱՆ ԲԱԶՄԱՊԱՏԿՄԱՄԲ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
8.6. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԸ ՓՈՓՈԽԱԿԱՆԻ ԿԵՐՊԱՓՈԽՈՂ ԿԵՐՊԱՓՈԽԻՉՆԵՐ (ԻՆՎԵՐՏՈՐՆԵՐ)
8.6.1. ՄԻԱՏԱԿՏ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
8.6.2. ԵՐԿՏԱԿՏ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
8.6.3. ԹԻՐԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
8.7. ԵԼՔԱՅԻՆ ԱՍՏԻՃԱՆԱՅԻՆ ԼԱՐՄԱՄԲ ԻՆՎԵՐՏՈՐ
8.8. ԹԻՐԻՍՏՈՐԱՅԻՆ ՀԱՃԱԽԱԿԱՆ ԿԵՐՊԱՓՈԽԻՉ
8.10. ՀԱՃԱԽՈՒԹՅԱՆ ՄԻՋԱՆԿՅԱԼ ԿԵՐՊԱՓՈԽՈՒՄՈՎ ՈՒՂՂԻՉՆԵՐ
9. ԼԱՐՄԱՆ ԵՎ ՀՈՍԱՆՔԻ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
9.1. ԿԱՅՈՒՆԱՐԱՐՆԵՐԻ ՆՇԱՆԱԿՈՒԹՅՈՒՆԸ ԵՎ ԴԱՍԱԿԱՐԳՈՒՄԸ
9.2. ՀԱՍՏԱՏՈՒՆ ԼԱՐՄԱՆ ՊԱՐԱՄԵՏՐԱԿԱՆ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
9.3. ՀԱՍՏԱՏՈՒՆ ԼԱՐՄԱՆ ՓՈԽՀԱՏՈՒՑՈՒՄՈՎ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
9.3.1. ԿԱՐԳԱՎՈՐՈՂ ՏԱՐՐԻ ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՄԱՄԲ ՓՈԽՀԱՏՈՒՑՈՒՄՈՎ ԿԱՅՈՒՆԱՐԱՐ
9.5. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՊԱՐԱՄԵՏՐԱԿԱՆ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
10. ՀԻԲՐԻԴԱՅԻՆ ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐ
10.1. ՀԻԲՐԻԴԱՅԻՆ ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ԿԱՌՈՒՑՄԱՆ ՍԿԶԲՈՒՆՔՆԵՐԸ
10.2. ՈՒԺԱՅԻՆ ՇՂԹԱՆԵՐԻ ՀԻԲՐԻԴԱՅԻՆ ԿՈՄՈՒՏԱՑՄԱՆ ՍԽԵՄԱՆԵՐ
10.3. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ ՀՊԱՐԿԻՉ ՕԺԱՆԴԱԿ ՀՊԱԿԻ ԵՎ ԹԻՐԻՍՏՈՐՆԵՐԻ ԿԻՐԱՌՄԱՄԲ
10.4. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ ՀՊԱՐԿԻՉ ՀՈՍԱՆՔԻ ՏՐԱՆՍՖՈՐՄԱՏՈՐԻ ԿԻՐԱՌՄԱՄԲ
10.5. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ ՀՊԱՐԿԻՉ ԿԱՄՐՋԱԿԱՅԻՆ ՀՊԱԿԻ ԿԻՐԱՌՄԱՄԲ
ՆԱԽԱԲԱՆ
Գիտության, տեխնիկայի և տնտեսության տարբեր բնագավառների առաջընթացը սերտորեն կապված է էլեկտրամեխանիկական և էլեկտրոնային ապարատների զարգացման հետ: Դրանք լայնորեն կիրառվում են էլեկտրատեխնիկայում, էներգետիկայում, կապի և էլեկտրական տրանսպորտի համակարգերում, կենցաղում, ռազմական և այլ ոլորտների ավտոմատիկայի, ինֆորմացիոն չափիչ, կենցաղային, հաշվիչ տեխնիկայի և այլ նշանակության սարքավորումներում:
ՈՒսումնական ձեռնարկում ներկայացված նյութը վերաբերում է էլեկտրոնային ապարատներին, որոնց կիրառմանը, զարգացմանը և արտադրությանը վերջին տարիներին մեր հանրապետությունում առաջնային դեր է վերապահվում, ինչի համար էլ կարևորվում է ձեռնարկի նշանակությունը ուսումնական գործընթացում:
Տարբեր գործառական նշանակության էլեկտրոնային ապարատների ֆունկցիոնալհնարավորությունների և որակի մեծացումը, եզրաչափերի, կշռի և ինքնարժեքի նվազումը պայմանավորված են էլեկտրոնիկայի` հատկապես ուժային էլեկտրոնային տարրերի(դիոդ, տրանզիստոր,թիրիստոր) տեխնոլոգիաների զարգացմամբ:
Ձեռնարկը բաղկացած է տասը գլուխից, որտեղ նկարագրվում են ժամանակակից` առավել պահանջարկվող և կիրառվող էլեկտրոնային ապարատները, ինչն ապագա մասնագետին կտա գիտելիքներ էլեկտրոնային սարքերի կառուցվածքի, աշխատանքի սկզբունքի և կիրառման հնարավորությունների մասին:
Ձեռնարկի նյութը հեղինակի կողմից հրատարակված էլեկտրոնային ապարատներին վերաբերող մեթոդականցուցումների և ուսումնականգործընթացումներդրած հետևյալ լաբորատորաշխատանքների շարունակությունն է.
1. Հովհաննիսյան Ա., Անկոնտակտ կիսահաղորդչային ռելե: Կուրսային աշխատանքի մեթոդականցուցումներ/ Երևան, 1999.- 24 էջ:
2. ՀովհաննիսյանԱ., Մարտինյան Վ. Էլեկտրական էներգիայի կերպափոխիչներ: Մեթոդական ցուցումներ դիպլոմային և կուրսային աշխատանքների համար/ Երևան, ՀՊՃՀ, 2004.- 45 էջ:
3. Հովհաննիսյան Ա., Անկոնտակտ էլեկտրական ապարատներ: Լաբորատորաշխատանքների կատարման մեթոդական ցուցումներ / Երևան, Ճարտարագետ, 2008.- 56 էջ:
ՈՒսումնական ձեռնարկի նյութը համապատասխանում է, մասնավորապես, <<Էլեկտրական և էլեկտրոնային ապարատներ>>, և <<ՈՒժային էլեկտրական և էլեկտրոնային ապարատներ>> բակալավրական առարկայական դասընթացների ծրագրերին:
Հեղինակն իր շնորհակալությունն է հայտնում ՀԱՊՀ Էլեկտրոնային տեխնիկայի ամբիոնի աշխատակիցներ դոցենտ Ս. Մանուկյանին, պրոֆեսոր Ն. Պետրոսյանին և գրախոսներ Վ. Համբարյանին ու Մ. Մուրադյանին, ինչպես նաև <<National Instruments AM>> ձեռնարկության աշխատակիցներին արժեքավոր դիտողությունների և առաջարկությունների համար:
Հեղինակը խնդրում է ձեռնակի նյութին վերաբերող առաջարկությունները և դիտողությունները ներկայացնել andranik.hovhannisyan@yandex.ru էլեկտրոնային հասցեով:
1.ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻԱՌԱՆՁՆԱՀԱՏԿՈՒԹՅՈՒՆՆԵՐԸ
1.1 ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
Էլեկտրական ապարատների միջոցով իրականացվում են էլեկտրական շղթայի կոմուտացում, պարամետրերի կայունացում, կարգավորում, էլեկտրական էներգիայի կերպափոխում, վթարային ռեժիմներից պաշտպանություն և այլ գործողություններ:
Էլեկտրական շղթայի կոմուտացումը սարքավորման կամ ապարատի էլեկտրական շղթայի միացումը, անջատումը կամ փոխանջատումն է, կայունացումը` որևէ պարամետրի արժեքի պահպանումը որոշակի հանձնարարված մակարդակում, կարգավորումը` պարամետրի արժեքի ինքնաշխատ կերպով փոփոխությունը հանձնարարված օրինաչափությամբ, իսկ էլեկտրական էներգիայի կերպափոխումը մի տեսակի էլեկտրական էներգիայի կերպափոխումն է մեկ այլ տեսակի (օրինակ, մեկ հաճախականության փոփոխական լարման կերպափոխումը մեկ այլ հաճախականության փոփոխական լարման, կամ հաստատուն լարման կերպափոխումը փոփոխական լարման և այլն), իսկ էլեկտրական շղթայի վթարային ռեժիմներից պաշտպանությունը կարճ միացումից, գերբեռնվածությունից և լարման ցածրացումից ու բարձրացումից պաշտպանությունն է: Թվարկված գործընթացներն իրականացվում են էլեկտրական ապարատների միջոցով. օրինակ, ռելեները, հպարկիչները, բանալիները նախատեսված են էլեկտրատեխնիկական սարքավորումների կոմուտացման համար, էլեկտրական ապահովիչները` պաշտպանական սարքեր են, նախատեսված են էլեկտրատեխնիկական սարքավորումները վթարային ռեժիմներից պաշտպանելու համար, թողարկիչները` կոմուտացման և միաժամանակ վթարային ռեժիմներից պաշտպանելու համար, իսկ ինվերտորները` էլեկտրական էներգիայի կերպափոխման համար:
Էլեկտրական ապարատներն ըստ կառուցվածքի և էլեկտրական շղթայի կոմուտացման բաժանվում են երկու խմբի` հպակային և անհպակ (էլեկտրոնային):
Հպակային էլեկտրական ապարատը էլեկտրական շղթայի կոմուտացումն իրականացնում է մեխանիկական հպակների տեղաշարժման միջոցով, իսկ էլեկտրոնային (ստատիկ) ապարատում այն իրականացվում է էլեկտրոնային տարրերի աշխատանքային ռեժիմի փոփոխման միջոցով:
1.2. ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻ ԱՌԱՆՁՆԱՀԱՏԿՈՒԹՅՈՒՆՆԵՐԻ ՎԵՐԼՈՒԾՈՒԹՅՈՒՆԸ
Անհպակ (ստատիկ) ապարատները ստեղծվում են էլեկտրոնային` հիմնականում երկշերտ կամ բազմաշերտ կիսահաղորդչային անցումներով տարրերի բազայի վրա:
Ըստ աշխատանքի սկզբունքի կիսահաղորդչային տարրերը բաժանվում են երեք խմբի: Դրանք են.
- դիոդները, որոնք չկառավարվող կիսահաղորդչային փականներ են,
- թիրիստորները, որոնք կիսահաղորդչային կառավարվող փականներ են,
- տրանզիստորները, որոնք էներգիայի հզորության ուժեղարարներ են:
Հպակային և անհպակ էլեկտրական ապարատների կիրառման ոլորտները հստակեցնելու համար ներկայացնենք դրանց առավելությունների և թերությունների համեմատական վերլուծությունը:
Էլեկտրոնային ապարատները կիրառվում են այն դեպքերում, երբ պետք է.
- սահուն փոփոխել ելքային պարամետրերը,մինչդեռ հպակայիններում դրանք ունենում են թռիչքային փոփոխություն, քանի որ աշխատում են միայն միացում-անջատում ռեժիմով,
- իրականացնել էլեկտրական շղթայի հաճախակի կոմուտացում, քանի որ էլեկտրոնային ապարատներն ավելի արագագործ են և ապահովում են փոխանջատումների մեծ արագություն: Մինչդեռ հպակայիններն ունեն կոմուտացման ցածր հաճախականություն` ի հաշիվ շարժական իներցիոն հանգույցների,
-կառավարվեն թվային տարրերի ելքային ազդանշաններից, ինչը հպակային ապարատներում դառնում է անհնարին, քանի որ պահանջում են կառավարման մեծ հզորություն,
- էլեկտրական շղթան կոմուտացնել առանց կայծերի կամ աղեղների, ինչի շնորհիվ ապահովվում է պայթյունավտանգ միջավայրի անվտանգություն: Հպակային սարքերում էլեկտրական շղթայի կոմուտացումն ուղեկցվում է կայծերով կամ աղեղներով,
- մեծ աշխատանքային ռեսուրս, քանի որ դա կախված է ոչ թե կոմուտացման քանակից, այլ օգտագործվող բաղադրամասերի ծերացումից, և դրանց ծառայության ժամկետը գնահատվում է աշխատաժամով: Հպակայինապարատներումդա պայմանավորված է կոմուտացման քանակով, քանի որ մաշվող և քայքայվող տարրերը նվազեցնում են ապարատի աշխատանքային ռեսուրսը,
- ավտոմատացնել հավաքման տեխնոլոգիան, ինչը չի ապահովվում հպակայինապարատներում, բացի այդ վերջինների համար պահանջվում է հաճախակիսպասարկում` կարգավորել հպակների անկման չափը, փոխել ուժային հպակները և աղեղամարիչ խցիկները,
- մեխանիկական կայունություն և աշխատունակության ապահովում` գտնվելով տարածությունում ցանկացած դիրքով: Հպակային ապարատներում շարժուն հանգույցների իներցիականությունն ու զանգվածը կարող են առաջ բերել հպակների ինքնամիացումների կամ ինքնանջատումների` հատկապես մեծ արագացումների և մեխանիկական տատանումների ժամանակ,
- անաղմուկ աշխատանք, մինչդեռ հպակայինապարատներումշարժական հանգույցների և հպակների տեղաշարժը և հարվածներն առաջացնում են աղմուկ,
- աշխատեն աղտոտված միջավայրում, մինչդեռ հպակայինապարատներում շարժական հանգույցները և հպակները պետք է պաշտպանված լինեն փոշուց և այլ վնասակար ազդեցություններից, բացի այդ, աղեղների ժամանակ անջատվում է մեծ ջերմություն, ինչի ազդեցությամբ առաջանում են թունավոր և քիմիական ակտիվ նյութեր:
Չնայած նշված առավելություններին էլեկտրոնային ապարատներն ունեն իրենց թերությունները, որոնցից են.
- գալվանական կապի առկայությունը կառավարող և կառավարվող շղթաների միջև (բացառությամբ օպտրոնների), ինչը բացակայում է հպակային ապարատներում,
- էլեկտրական շղթայի անջատման ժամանակ շղթան չի խզվում, այլ ուղեկցվում է էլեկտրական դիմադրության արժեքի կտրուկ փոփոխմամբ: Այսպես, օրինակ հպակային սարքերում բաց և փակ հպակների դիմադրությունների հարաբերությունը կազմում է 1010…1014 Օմ, իսկ անհպակների մոտ` 104…107 Օմ: Հպակային ապարատներում տեսանելի է էլեկտրական շղթայի խզումը,
- կոմուտացվող մեծ հոսանքների դեպքում լարման անկումն էլեկտրոնային տարրերում ավելի մեծ է, քան հպակայիններում, ինչն առաջ է բերում ջերմային կորուստ, որի պատճառով էլեկտրոնային տարրերի սառեցման խնդիր է առաջանում,
- էլեկտրոնային տարրերը թույլատրում են 3…10 անգամ ավելի քիչ գերլարումներ և հատկապես վատ են աշխատում լարման արագ փոփոխման ժամանակ,
- էլեկտրոնային տարրերն ապահովում են ավելի քիչ տևողությամբ հոսանքի բեռնունակություն և շատ զգայուն են շրջապատի ջերմաստիճանի բարձրացման նկատմամբ,
- հզոր էլեկտրոնային ապարատների ինքնարժեքը և եզրաչափերը գերազանցում են հպակայինների համապատասխան պարամետրերին,
- բազմատարր են, պահանջվում են բազմաթիվ չքանդվող միացումներ, ինչը նվազեցնում է սարքի հուսալիությունը և մեծացնում է հավաքման ուկարգաբերման գործողությունների քանակը,
- անթույլատրելի են կարճ միացման հոսանքները և ինդուկտիվություններում կուտակված էլեկտրամագնիսական էներգիայից առաջացող գերլարումները,
- փոխանջատումների ժամանակ առաջանում են ռադիոխանգարումներ, որոնց մարման համար պահանջվում է լրացուցիչ ապարատների կիրառում,
- էլեկտրոնային տարրերը թույլատրում են հոսանքի և լարման աճի սահմանափակ արագություն,
- սարքերի հիմքը կազմող էլեկտրոնային տարրերն ունեն բարդ արտադրական տեխնոլոգիա:
Կիսահաղորդչային տեխնիկայի զարգացումը նպաստում է էլեկտրոնային ապարատների ավելի լայն կիրառմանը` փոխարինելով հպակայիններին:
Էլեկտրական ապարատի կարևոր էներգետիկ պարամետրերից են կոմուտացման հոսանքը, լարումը և հզորությունը:
Ըստ կոմուտացման հզորության ապարատները բաժանվում են երեք խմբի. փոքր հզորության` մինչև 1 Վտ, միջին հզորության` մինչև 10 Վտ և հզոր` 10 Վտ -ից մեծ:
Առանձին դեպքերում նպատակահարմար է մեկ ապարատի մեջ համակցել հպակային և անհպակ կոմուտացնող տարրերը, որոնց միջոցով ավելի արդյունավետ է դառնում էլեկտրական ապարատի տեխնիկական լուծումը, քանի որ կիրառվում են երկու համակարգի առավելությունները: Նման էլեկտրական ապարատները կոչվում են հիբրիդային:
1.3. ԷԼԵԿՏՐՈՆԱՅԻՆ ՏԱՐՐԵՐԻ ՄԻԱՑՄԱՆ ՏԱՐԲԵՐԱԿՆԵՐԸ
Երբ մեկ էլեկտրոնային տարրով հնարավոր չէ ապահովել անհրաժեշտ լարման կամ հոսանքի կոմուտացում, այն իրականացվում է նույնատիպ մի քանի տարրերի հաջորդաբար կամ զուգահեռ միացմամբ: Այդպիսի միացման դեպքում պետք է նկատի ունենալ, որ նույնատիպ կիսահաղորդչային տարրերի թե ուղիղ, և թե հակառակ վոլտամպերային բնութագրերի միջև կարող են լինել որոշակի տարբերություններ:
Էլեկտրոնային տարրերից դիտարկենք դիոդների և տրանզիստորների զուգահեռ և հաջորդաբար միացումները:
1.3.1. ԴԻՈԴՆԵՐԻ ԶՈՒԳԱՀԵՌ և ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՈՒՄՆԵՐ
Դիոդների զուգահեռ միացում արվում է այն դեպքում,
երբ դիոդի թույլատրելի ուղիղ
Iուղ հոսանքի արժեքն ավելի փոքր է շղթայի
I0 հոսանքի իրական արժեքից:
Այդ դեպքում,
զուգահեռ միացվող դիոդների
nզ քանակը որոշվում է հաշվարկային![]() արժեքն
ըստ առավելի կլորացմամբ.
արժեքն
ըստ առավելի կլորացմամբ.

Որտեղ kհ-ն գործակից է ըստ հոսանքի բեռնվածության՝ kհ = 0,5...0,8:
Երկու՝ VD1 և VD2 դիոդների զուգահեռ միացման էլեկտրական սխեմաների տարբերակները պատկերված են նկ. 1.1 -ում:
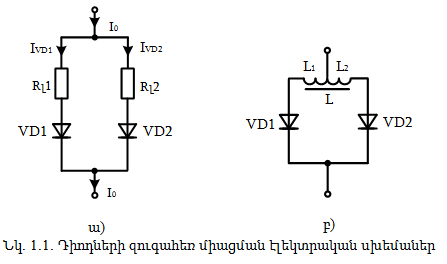
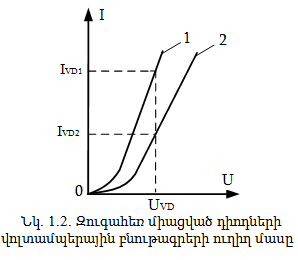
Զուգահեռ միացման դեպքում դիոդների վոլտամպերային բնութագրերի ուղիղ մասի տարբերության հետևանքով դիոդներն ըստ հոսանքի բեռնավորվում են տարբեր չափով (նկ. 1.2): Այսպես, օրինակ, ըստ նկ. 1.2 -ի միևնույն UVD ուղիղ լարման դեպքում երկու դիոդից առաջինի IVD1 ուղիղ հոսանքն ավելի մեծ է, քան երկրորդինը` IVD2 -ը: Այդպիսի տարբերության հետևանքով առաջին դիոդը կբեռնավորվի ավելի մեծ չափով, քան երկրորդը և եթե հոսանքը գերազանցի սահմանային թույլատրելի արժեքը, ապա կհանգեցնի առաջինի խափանմանը, որից հետո նաև երկրորդ դիոդի շարքից դուրս գալուն:
Փոքր հզորության շղթաներում դիոդների զուգահեռ ճյուղերում հոսանքների հավասարեցումն արվում է նույն մեծության լրացուցիչ Rլ1 և Rլ2 ակտիվ դիմադրությունների միջոցով (նկ. 1.1ա), որոնց արժեքը պետք է լինի 5...10 անգամ մեծ, քան դիոդների ուղիղ դիմադրությունը:
Լրացուցիչ դիմադրությունների արժեքը որոշվում է հետևյալ կերպ.

որտեղ Uուղ -ը տվյալ տիպի դիոդի ուղիղ լարման մեծությունն է:
Հզոր շղթաներում հոսանքների հավասարեցումն արվում է միջինացված կետով L ինդուկտիվ բաժանիչի կիրառմամբ (նկ. 1.1բ), որի համապատասխանաբար L1 և L2 մասերում առաջացող ինքնինդուկցիայի էլեկտրաշարժ ուժերը նվազեցնում են ճյուղերում հոսանքների տարբերությունը:
Երբ
դիոդի թույլատրելի
հակառակ
սահմանային
Uհակ
լարման
արժեքը
փոքր է
շղթայի
վրա գործող
![]() արժեքից,
կատարվում
է
նույնատիպ
դիոդների
հաջորդաբար
արժեքից,
կատարվում
է
նույնատիպ
դիոդների
հաջորդաբար
միացում:
Այդ դեպքում
հաջորդաբար
միացվող
դիոդների
mհ
քանակը
որոշվում
է հաշվարկային
![]() արժեքն
ըստ առավելի
կլորացմամբ.
արժեքն
ըստ առավելի
կլորացմամբ.

որտեղ kլ-ն գործակից է ըստ լարման բեռնվածության՝ kլ = 0,5...0,8:
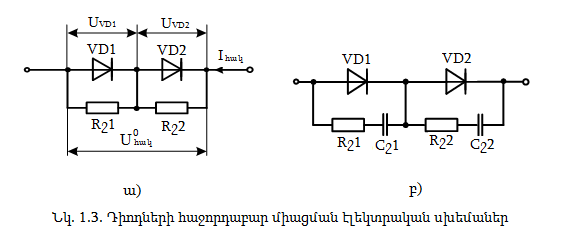
Երկու դիոդների հաջորդաբար միացման էլեկտրական սխեմաները պատկերված են նկ. 1.3 -ում:
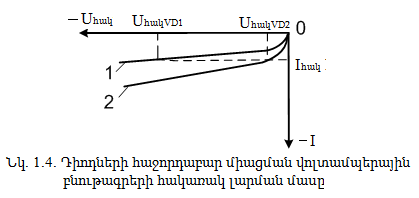
Հաջորդաբար միացման դեպքում դիոդների վոլտամպերային բնութագրերի հակառակ մասի տարբերության հետևանքով դիոդների վրա գործող հակառակ լարման արժեքները կլինեն տարբեր (նկ. 1.4): Օրինակ, համաձայն նկ. 1.4 –ի, միևնույն Iհակ հակառակ հոսանքի դեպքում երկու դիոդից առաջինի հակառակ UհակVD1 լարման արժեքն ավելի մեծ է, քան երկրորդինը` UհակVD2 -ը: Այդպիսի լարման անհամաչափ բաշխման հետևանքով, եթե դիոդի վրայիլարումըգերազանցիթույլատրելիսահմանայինարժեքը, կիսահաղորդչային անցումը կարող է ծակվել, որի հետևանքով կխափանվի նրա աշխատանքը:
Դիոդների վրա հակառակ լարման բաշխման հավասարությունը իրականացվում է դրանցից յուրաքանչյուրին զուգահեռ Rշ շունտող ակտիվ դիմադրության միացմամբ (նկ. 1.3ա): Այդ դիմադրություններով անցնող հոսանքի արժեքը պետք է լինի դիոդների հակառակ Iհակ հոսանքի առավելագույն արժեքից 5…10 անգամ մեծ:
Շունտող դիմադրության արժեքը կարող է որոշվել հետևյալ կերպ

Բարձր լարման շղթաներում դիոդները շունտում են կոնդենսատորով կամ դիմադրություն-կոնդենսատոր շղթայով (նկ. 1.3բ):
1.3.2. ՏՐԱՆԶԻՍՏՈՐՆԵՐԻ ԶՈՒԳԱՀԵՌ ԵՎ ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՈՒՄՆԵՐԸ
Էլեկտրոնային ապարատներում կիրառելի են նաև տրանզիստորների զուգահեռ և հաջորդաբար միացումները: Մեծ հոսանքների դեպքում տրանզիստորները միացվում են զուգահեռ, իսկ մեծ լարումների դեպքում` հաջորդաբար:
Տրանզիստորների քանակի ընտրման պայմանների տրամաբանությունը նույն է, ինչ դիոդներինը:
Նկ. 1.5-ում ցույց են տրված VT1 և VT2 տրանզիստորների զուգահեռ միացման լեկտրական սխեման, որտեղ ընդհանուր I հոսանքի հավասար բաշխման համար յուրաքանչյուր տրանզիստորի էմիտերի շղթայում միացվում է Rլ լրացուցիչ դիմադրություն` համապատասխանաբար Rլ1 և Rլ2, որոնց միջոցով հավասարակշռվում են տրանզիստորների պարամետրերի միջև եղած տարբերությունը:
Տրանզիստորների միջով անցնող հոսանքների բաշխման հավասարեցումը կատարվում է հետևյալ կերպ, եթե տրանզիստորներից մեկով անցնող հոսանքը, օրինակ VT1 -ինը` IVT1-ը գերազանցում է VT2 -ով անցնող հոսանքին` IVT2 -ին, ապա մեծանում է լարման անկումը Rլ1 -ի վրա, հետևաբար փոքրանում է VT1 -ի էմիտերային պոտենցիալը, որը հանգեցնում է VT1 -ի մասամբ փակվելուն, այսինքն` նրա էմիտեր-կոլեկտոր դիմադրության մեծացմանը, ինչի արդյունքում փոքրանում է նրա միջով անցնող հոսանքի մեծությունը:
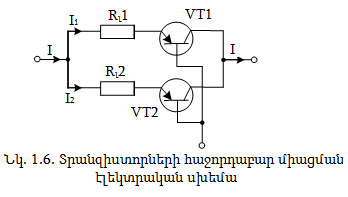
Մեծ լարումների դեպքում տրանզիստորները միացվում են հաջորդաբար, իսկ դրանց վրայի լարումների հավասարեցման համար, ինչն առաջանում է տրանզիստորների պարամետրերի տարբերության հաշվին, զուգահեռ միացվում են շունտող Rշ դիմադրություններ: Այդպիսի միացման օրինակ է ցույց տրված նկ. 1.6 -ում:
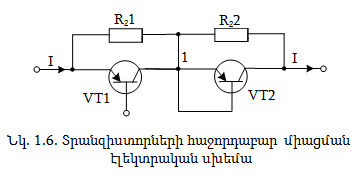
Եթե տրանզիստորներից մեկի վրայի լարումը, օրինակ VT1 -ինը, դառնում է մեծ մյուսից` VT2 -ից, ապա VT2 -ի էմիտերային պոտենցիալը (1 կետի պոտենցիալը) փոքրանում է, ինչը հանգեցնում է նրա էմիտեր-կոլեկտոր դիմադության մեծացմանը, հետևաբար նաև դրա վրայի լարման անկման մեծացմանը:
1.4. ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐԻ ԵՎ ՏԱՐՐԵՐԻՊԱՇՏՊԱՆՈՒԹՅԱՆՄԻՋՈՑՆԵՐԸ
Էլեկտրոնային ապարատների ևտարրերի հուսալիությունը և աշխատանքային ռեսուրսը մեծացնելու համար պետք է ապահովել դրանց պաշտպանությունը կարճ միացման և գերբեռնվածության ռեժիմներից:
Էլեկտրական ապարատի աշխատանքի ժամանակ երբեմն առաջանում են չնախատեսված վթարային իրավիճակներ, որոնցից հատկապես պետք է նշել. կարճ միացված ռեժիմը բեռի շղթայում, բեռի պարամետրերի չնախատեսված փոփոխությունները թույլատրելի սահմաններից դուրս, առանձին տարրերի և հանգույցների աշխատանքի խափանումը կամ ոչ նորմալ ռեժիմով աշխատանքը, ջերմային բեռնվածությունները և այլն:
Առանձին էլեմենտների կամ հանգույցների պաշտպանության նպատակը դրանց նորմալ աշխատունակության ապահովումն է վթարային պատճառի վերացումից հետո: Պաշտպանությունը կանխում է ապարատի ներսում վթարի ազդեցության զարգացումը և դյուրացնում է ապարատի վերանորոգումը:
Էլեկտրական ապարատի պաշտպանությունը լինում է ընդհանուր և անհատական:
Ընդհանուր պաշտպանությունը գործում է վթարային վիճակում` պաշտպանելով ապարատն ամբողջությամբ,իսկ անհատական պաշտպանությունն ապահովում է ապարատի առանձին տարրերի և հանգույցների անջատումը կամ գերբեռնվածության վերացումը:
Պաշտպանությանմեթոդներնըստսկզբունքիլինումենսխեմային, պասիվևակտիվ:
Պաշտպանության սխեմային մեթոդը հիմնված է հատուկ սխեմայի կառուցվածքի վրա, որը ծանրաբեռնվածության դեպքում ինքնաշխատ անցում է կատարում այնպիսի վիճակի, որի դեպքում խափանվում է ապարատի աշխատանքը: Դա վտանգավոր ազդեցություն չի թողնում առանձին տարրերի վրա:
Պաշտպանության պասիվ մեթոդը գերբեռնվածության ի հայտ գալու դեպքում հիմնականում սահմանափակում է հոսանքի կամ լարման արժեքը գերբեռնված տեղամասում կամ էլ ամբողջությամբ անջատում է ապարատը կամ տարրը: Պասիվ պաշտպանության օրինակ կարող է լինել դյուրահալ ապահովիչի, ավտոմատ անջատիչի, ստաբիլիտրոնի և այլնի կիրառումը:
Պաշտպանության ակտիվ մեթոդը պասիվից տարբերվում է նրանով, որ առաջացող փոփոխությունն ազդում է գործող տարրի վրա ոչ թե անմիջապես, այլ որոշակի կառավարող հանգույցի միջոցով: Վերջինս կատարում է հսկվող պարամետրի փոփոխության ուժեղացում, ինչի շնորհիվ պաշտպանության ակտիվ սխեման ապահովում է բարձր զգայունություն:
Բոլոր դեպքերում պաշտպանության սխեման պետք է լինի բավականին արագագործ և զգայուն, այսինքն` այն պետք է գործի ավելի արագ, քան պաշտպանության ենթակա ապարատը կամ տարրերը կհասցնեն շարքից դուրս գալ վթարի կամ գերբեռնվածության հետևանքով:
Վթարային և գերբեռնվածության ռեժիմներից հատկապես գերզգայուն են էլեկտրոնային տարրերը: Եթե հոսանքը կամ լարումը գերազանցում են թույլատրելի սահմանը, ապա տեղի է ունենում էլեկտրոնային տարրի էլեկտրական կամ ջերմային ծակում, ինչը քայքայում է կիսահաղորդչային անցումը: Դրա համար էլ այդ տարրերին ապահովում են անհատական պաշտպանությամբ, որոնց տարբերակները բերված են նկ. 1.7 -ում:
Կիսահաղորդչային տարրը պաշտպանելու համար հաճախ միացվում է ֆեռոմագնիսական միջուկով մեծ L ինդուկտիվությամբ փաթույթ (դրոսել) (նկ. 1.7ա), ինչը սահմանափակում է շղթայում հոսանքի թռիչքային փոփոխությունները` ի հաշիվ դրանում առաջացող ինքնինդուկցիայի էլեկտրաշարժ ուժի:
Կարճ միացման հոսանքներից պաշտպանելու համար կիսահաղորդչային տարրերին երբեմն միացվում է արագագործ հալվող ներդիրով FU ապահովիչ (նկ. 1.7բ) կամ ավտոմատ անջատիչ (նկ. 1.7գ), ինչի շնորհիվ խզվում է էլեկտրական շղթան, երբ հոսանքը գերազանցում է որոշակի արժեքը: Ապահովիչը կամ ավտոմատ անջատիչը պետք է վթարային հոսանքներն ընդհատեն ավելի շուտ, քան տարրը կամ ապարատը կհասցնեն վնասվել և շարքից դուրս գալ:
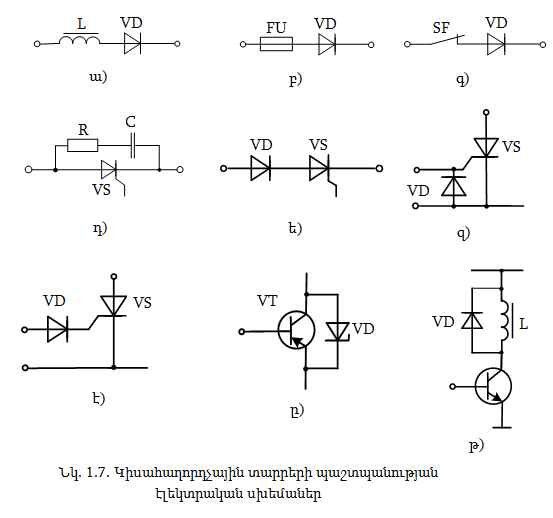
Կոմուտացման ժամանակ առաջացող գերլարումներից պաշտպանելու համար թիրիստորի ուժային էլեկտրոդներին զուգահեռ միացվում է RC շղթա (նկ. 1.7դ), իսկ հակառակ լարման ամպլիտուդը փոքրացնելու համար հաջորդաբար միացվում է VD դիոդ (նկ. 1.7ե):
Թիրիստորների կառավարման էլեկտրոդներին մեծ վտանգ են ներկայացնում բացասական լարումները և հետադարձ հոսանքները, որոնց ազդեցությամբ կարող է առաջանալ կիսահաղորդչային անցման ծակում: Հակադարձ լարումների կամ հոսանքների ազդեցությունը սահմանափակելու համար թիրիստորի կառավարման էլեկտրոդին զուգահեռ (նկ. 1.7զ) կամ հաջորդաբար (նկ. 1.7է) միացվում է VD դիոդ:
Տրանզիստորները գերլարումներից պաշտպանելու համար կոլեկտորի և էմիտերի միջև միացվում է VD ստաբիլիտրոն (նկ. 1.7ը), ինչը սահմանափակում է կոլեկտորային լարումը: Այդ լարման մեծացման դեպքում կտրուկ մեծանում է VD -ով հոսանքը և լարման անկումը տրանզիստորի արտաքին բեռի վրա:
Եթե կիսահաղորդչային տարրի բեռն ունի ակտիվ-ինդուկտիվ բնույթ, ապա բեռն անջատելու ժամանակ առաջանում է գերլարում` ինքնինդուկցիայի էլեկտրաշարժ ուժ, որը գումարվելով սնման լարմանը` կարող է կիսահաղորդչային տարրը ծակել, ուտի գերլարումից կիսահաղորդչային տարրը պաշտպանելու համար բեռին զուգահեռ միացվում է դիոդ` հակառակ բևեռականությամբ (նկ. 1.7թ):
Պաշտպանության այս մեթոդները սկզբունքորեն կիրառելի են նաև մյուս տեսակի կիսահաղորդչային տարրերի պաշտպանության ժամանակ:
Էլեկտրոնային ապարատներում կիրառվում են նաև այլ տարրեր, մասնավորապես` տրանսֆորմատոր, կոնդենսատոր, դրոսել, ռեզիստոր և այլն: Դրանք ավելի դիմացկուն են գերբեռնվածությունների նկատմամբ, որի պատճառով էլ դրանց համար միշտ չէ, որ նախատեսվում են անհատական պաշտպանություններ:
Էլեկտրոնային ապարատների հուսալիության մեծացման համար հաճախ այն ամբողջացնում են տարբեր պաշտպանական սխեմաներով:
2.ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ԷԼԵԿՏՐՈՆԱՅԻԱՂԲՅՈՒՐՆԵՐ
Էլեկտրական իմպուլսներն էլեկտրոնային ապարատների անբաժանելի մասն են կազմում, քանի որ դրանցում օգտագործվող տրանզիստորները, թիրիստորները և թվային տարրերը կառավարվում են էլեկտրական իմպուլսների միջոցով: Վերը նշված տարրերի ճիշտ աշխատանքային ռեժիմները կախված են կառավարման իմպուլսի տեսակից և պարամետրերից:
2.1. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՏԵՍԱԿՆԵՐԸԵՎ ՀԻՄՆԱԿԱՆ ՊԱՐԱՄԵՏՐԵՐԸ
Էլեկտրական իմպուլս ասելով պետք է հասկանալ լարման կամ հոսանքի շեղումը նախնական արժեքից, որը տեղի է ունենում կարճատև ժամանակահատվածում:
Էլեկտրական իմպուլսները լինում են ստանդարտ և ոչ ստանդարտ (նկ. 2.1): Նկարում պատկերված իմպուլսների առաջին ութը համարվում են ստանդարտ, իսկ վերջինը` ոչ ստանդարտ.
- (ա) ուղղանկյունաձև` դրական բևեռականությամբ
- (բ) ուղղանկյունաձև` բացասական բևեռականությամբ
- (գ) ուղղանկյունաձև` դրական բևեռականությամբ շեղված որոշակի արժեքով
- (դ) երկբևեռ ուղղանկյունաձև
- (ե) եռանկյունաձև
- (զ) սեղանաձև
- (է) սղոցաձև
- (ը) սինուսոիդալ
- (թ) ոչ ստանդարտ
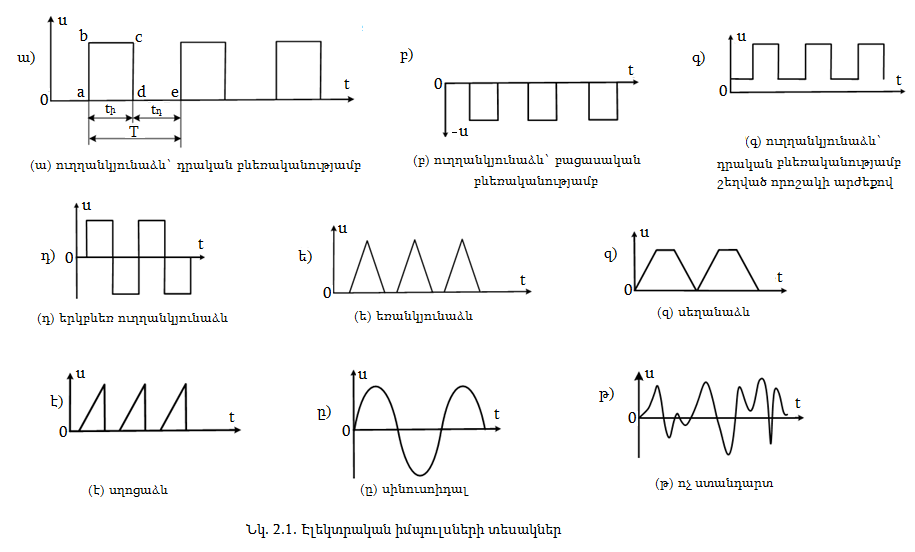
Էլեկտրական իմպուլսները բնութագրվում են մի շարք պարամետրերով: Դիտարկենք հիմնականպարամետրերըընդհանրացված (նկ. 2.1ա) ևիրական (նկ. 2.2) տեսքով ուղղանկյունաձև իմպուլսների օրինակներով: Նկար 2.1ա -ում ab -ն իմպուլսի ճակատն է, cd –ն` իմպուլսի հատվածքը կամ հետին ճակատը, bc –ն` իմպուլսի գագաթն է, ad –ն` իմպուլսի հիմքը, իսկ de -ն` միջիմպուլսային դադարը:
Իմպուլսի ամպլիտուդը: Բոլոր տեսակի իմպուլսների ամենամեծ արժեքը նրա ամպլիտուդն է: Նկար 2.2 –ում բերված լարման իմպուլսի դեպքում ամպլիտուդը նշանակված է Um -ով: Ամպլիտուդը չափվում է լարմանդեպքում` վոլտով (Վ), միկրովոլտով (մկՎ=10-6Վ), միլիվոլտով (մՎ=10-3Վ), կիլովոլտով (կՎ=103Վ), իսկհոսանքիդեպքում` ամպերով (Ա), միկրոամպերով (մկԱ = 10-6Ա), միլիամպերով (մԱ = 10-3Ա), կիլոամպերով (կԱ = 103Ա):
Ճակատների
միջև գտնվող իմպուլսի
տեղամասը, որը
կոչվում է գագաթ,
կարող է ունենալ
անկում, որը բնութագրվում
է ![]()
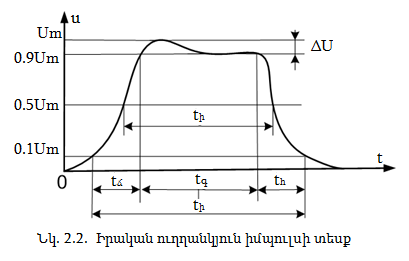
Իմպուլսի տևողությունը: Որպես իմպուլսի tի տևողություն ընդունում են 0,5Um ամպլիտուդի կեսը` համապատասխանող մակարդակի վրա չափված ժամանակամիջոցը (նկ. 2.2): Երբեմն իմպուլսի տևողությունը որոշում են 0,1Um մակարդակի վրա կամ ըստ իմպուլսիհիմքի: Եթե վերապահում չի արված, ապա իմպուլսի տևողությունը որոշվում է ըստ հիմքի: Այդ մեծությունը չափվում է ժամանակի միավորով` վայրկյանով (վ), նանովայրկյանով (նվ=10-9 վ), միկրովայրկյանով (մկվ=10-6 վ), միլիվայրկյանով (մվ=10-3 վ):
Իմպուլսի ճակատների տևողությունները և թեքությունները: Իմպուլսն ունի առջևի ճակատ և հետին ճակատ` հատվածք: Իմպուլսի առջևի ճակատի տևողությունը tճ որոշվում է իմպուլսի աճի ժամանակով, իսկ հատվածքի տևողությունը` իմպուլսի անկման ժամանակով` tհ: Առավել հաճախ օգտվում են իմպուլսի ճակատի ակտիվ տևողության հասկացությունից, որն իմպուլսի 0,1Um -ից մինչև 0,9Um աճելու ժամանակն է: Նմանապես հատվածքի տևողությունը իմպուլսի անկման ժամանակն է 0,9Um -ից մինչև 0,1Um: Որքան փոքր է tճ -ն և tհ -ն, այնքան իմպուլսի ձևն ավելի է մոտենում ուղղանկյանը: Երբեմն tճ -ի և tհ -ի փոխարեն իմպուլսի ճակատները բնութագրվում են աճի և անկման արագությամբ: Այդ մեծությունը անվանում են ճակատի և հատվածքի թեքություն (ուղղանկյունաձև իմպուլսի համար), որի չափողականությունը Վ/վ է:
Իմպուլսիհզորությունը: Իմպուլսի W էներգիայի և տևողության հարաբերությամբ բնորոշվումէ իմպուլսի հզորությունը

Իմպուլսի հզորությունը չափվում է վատով (Վտ), միկրովատով (մկՎտ), միլիվատով (մՎտ), կիլովատով (կՎտ):
Իմպուլսների կրկնման պարբերությունը և հաճախությունը: Հավասար ժամանակամիջոցում կրկնվող իմպուլսները կազմում են պարբերական հաջորդականություն: Ազդանշանների կրկնման T պարբերությունը երկու հարևան իմպուլսների կրկնվող պահերի միջև ընկած ժամանակամիջոցն է (նկ. 2.1ա): Այն բաղկացած է tի իմպուլսի և tդ դադարի տևողություններից
![]()
և չափվում է ժամանակի միավորներով:
Կրկնման պարբերության հակադարձ մեծությունը կոչվում է իմպուլսների կրկնման f հաճախություն: Այն բնորոշում է պարբերությունների քանակությունը 1վ-ի ընթացքում և չափվում է հերցով (Հց), կիլոհերցով (կՀց=103 Հց), մեգահերցով (ՄՀց=106 Հց):
Լցման գործակիցը: Իմպուլսի տևողության և պարբերության հարաբերությունը կոչվում է լցման գործակից`
![]()
Այն չափողականություն
չունի և միշտ փոքր
է մեկից`![]()
Լցման գործակցի հակադարձ մեծությունը կոչվում է իմպուլսի միջանցայնություն`
![]()
Այն չափողականություն
չունի և միշտ մեծ
է մեկից` ![]()
Իմպուլսի միջին հզորությունը: Պարբերական իմպուլսի միջին հզորությունը որոշվում է W էներգիայի և պարբերության հարաբերությամբ.
![]()
Համեմատելով իմպուլսի հզորոթյունը և միջին հզորությունը` ստացվում է.
![]()
այսինքն` իմպուլսի հզորությունը, որն ապահովում է գեներատորը, գերազանցում է գեներատորի միջին հզորությանը q անգամ:
2.2. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՁԵՎԱՎՈՐՄԱՆ ԵՂԱՆԱԿՆԵՐԸ
Մեխանիկական կոճակների, փոխանջատիչների, թվային և անալոգային տարրերի բազայի վրա ստացվում են բազմազան էլեկտրական իմպուլսների ձևավորիչներ և գեներատորներ, որոնք կարելի է օգտագործել էլեկտրոնային տարրերի ևապարատների կառավարմանհամար:
2.2.1. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ՁԵՎԱՎՈՐԻՉՆԵՐ
Դիտարկենք իմպուլսիձևավորիչներիորոշտեսակներ:
Ամենապարզտարբերակըէլեկտրական իմպուլսիձևավորիչնէմեխանիկական SA կոճակիհպակների փակմանևբացմանմիջոցով (նկ. 2.3): Նկարում պատկերված է էլեկտրական սխեմաների ելքում ձևավորվող իմպուլսի բնույթն ըստ ժամանակի:
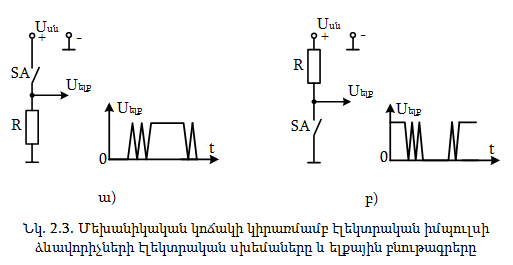
Այս տարբերակներն ունեն այն թերությունը, որ մեխանիկական կոճակի հպակների կոմուտացիայի ժամանակ կարող է առաջանալ մեխանիկական թրթռոց, որը էլեկտրական շղթայի միացումը և անջատումն է հպակների միմյանց հարվածի հետևանքով: Նման բացասական երևույթն անթույլատրելի է հատկապես որոշ թվային տարրերի համար, օրինակ` հաշվիչների, տրամաբանական տարրերի և այլն: Քանի որ թրթռման երևույթը բացասաբար է ազդում տարրերի բուն գործառույթի վրա, հետևաբար իմպուլսի տրվելը պետք է կատարվի թրթռման երևույթի ազդեցության վերացման միջոցների կիրառմամբ:
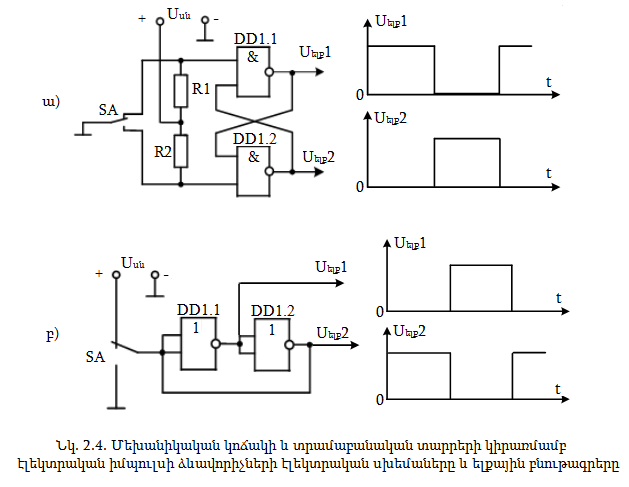
Մեխանիկական հպակի թրթռման երևույթի ազդեցության վերացմամբ կառավարման իմպուլսների ձևավորման էլեկտրական սխեմաների օրինակներ բերված են նկ. 2.4 -ում, որտեղ խնդիրը լուծված է մեկ մեխանիկական կոճակի և երկու Եվ-Ոչ տրամաբանական տարրերի վրա կառուցված R-S տրիգերի միջոցով` նկ. 2.4ա, իսկ նկ. 2.4բ -ում` Կամ-Ոչ տարրերի միջոցով: Նկարում պատկերված է էլեկտրական սխեմաների ելքերում ձևավորվող իմպուլսների բնույթն ըստ ժամանակի:
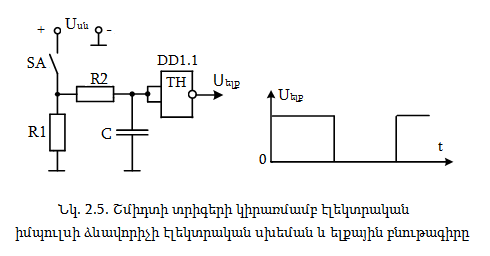
Եթե անհրաժեշտ է ստանալ ելքային իմպուլս, որի տևողությունը լինի հավասար մեխանիկական կոճակի հպակների փակման տևողությանը, կարելի է կիրառել նկ. 2.5 -ի էլեկտրական սխեման, որտեղ ինտեգրալ շղթայի և Շմիդտի տրիգերի միջոցով վերացվում է մեխանիկական հպակի թրթռման երևույթը: Նկարում պատկերված է նաև էլեկտրական սխեմայի ելքում ձևավորվող իմպուլսի բնույթը: R1 դիմադրության վրա առաջացող թրթռոցը հարթեցվում է R2C շղթայի միջոցով, իսկ տրիգերը ձևավորում է ելքային լարման ճակատները:
Մեխանիկական հպակների թրթռոցի մարման հետևյալ երեք տարբերակում գործում է որոշակի կապ մուտքային SA կոճակից ստացվող էլեկտրական իմպուլսի և ելքային իմպուլսի միջև (նկ. 2.6): Նկարում պատկերված են էլեկտրական սխեմաների մուտքային և ելքային իմպուլսների բնույթը և փոխադարձ կապերը:
Նկ. 2.6ա սխեման իր կատարած գործառույթով համարժեք է նկ. 2.5 -ի սխեմային: Սկզբնական վիճակում մուտքում և ելքում տրամաբանական 1 է: SA կոճակի հպակների փակվելու պահին C կոնդենսատորի ձախ շրջադիրի վրայի լարումը սկսում է փոքրանալ: Եթե R2C շղթայի ժամանակի հաստատունը ընտրված է բավականին մեծ, ապա լարումը հասնում է DD1.1 -ի փոխանջատման շեմին հպակների թրթռոցի վերջում: DD1.1 և DD1.2 Կամ-Ոչ տրամաբանական տարրերը փոխանջատվում են, և վերջում առաջանում է 0 մակարդակ: C կոնդենսատորով դրական հետադարձ կապն ապահովում է ելքային իմպուլսի ճակատների կտրուկությունը: Կոճակի հպակների բացվելու պահին տեղի է ունենում էլեկտրական շղթայի անջատում: Արդյունքում, ելքում ձևավորվում է իմպուլս, որի տևողությունը համապատասխանում է SA կոճակի հպակների փակման տևողությանը, իսկ առջևի և հետին ճակատները քիչ հապաղում են հպակների փակվելու և բացվելու պահերի նկատմամբ:
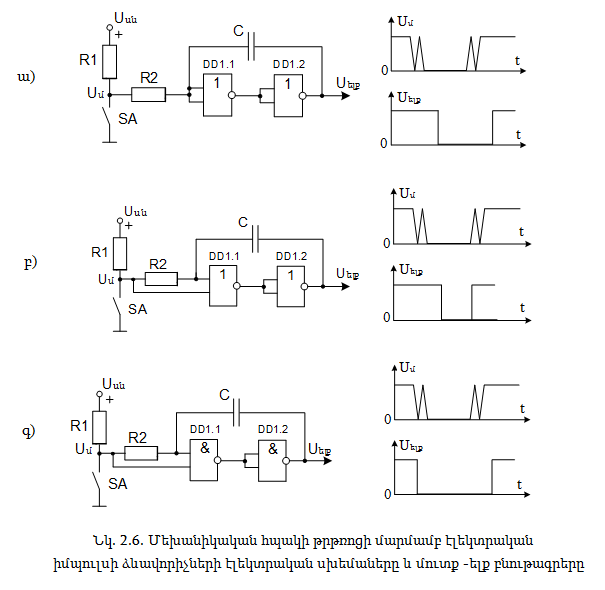
Այնպիսի ելքային իմպուլս ստանալու դեպքում, որի ճակատը պետք է համընկնի կոճակի հպակների փակվելու կամ բացվելու պահերին, կիրառվում են համապատասխանաբար նկ. 2.6բ կամ նկ. 2.6գ էլեկտրական սխեմաները: Նկար 2.6բ -ում SA կոճակի հպակների փակման պահին ելքում որոշակի հապաղմամբ ձևավորվում է 0 մակարդակ (նկ. 2.6ա -ի նմանակով): Կոճակի հպակների բացման պահին տրամաբանական 1 վիճակը տրվում է DD1 -ի ներքևի մուտքին և DD1.1, DD1.2 տարրերը փոխանջատվում են: DD1.2 -ի ելքից տրամաբանական 1 -ը կոնդենսատորի միջոցով տրվում է DD1.1 -ի մուտքին և պահում է նրան նույն վիճակում` SA կոճակի հպակների թրթռման տևողության ընթացքում: Նույն սկզբունքով է աշխատում նկ. 2.6գ էլեկտրական սխեման, որտեղ Եվ-Ոչ DD1.1, DD1.2 տրամաբանական տարրերի փոխանջատումը տեղի է ունենում SA կոճակի հպակների առաջին հպման պահին, իսկ անջատումը` անջատվող հպակի թրթռման երևույթի ավարտից հետո:
էլեկտրական իմպուլս կարող է ձևավորվել զգայուն (սենսորային) սեղմակների կիրառմամբ` երկու մետաղական թիթեղներին մատով հպվելով, օգտագործելով այն փաստը, որ մարդու մաշկի էլեկտրական դիմադրությունը կազմում է մոտ 5…10 կՕմ, որը շատ անգամ փոքր է RS տրիգերի մուտքային դիմադրությունից (նկ. 2.7):
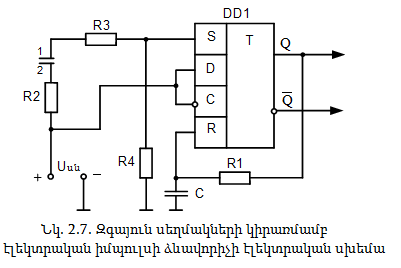
Այդպիսի իմպուլսների ձևավորիչներում կիրառվող DD1տարրը պետք է լինի մետաղ-օքսիդ-կիսահաղորդիչ (ՄՕԿ) կառուցվածքով, որոնք առանձնանում են մուտքային մեծ դիմադրությամբ` 109…1014 Օմ:
Մատով հպվելով 1 և 2 մետաղական թիթեղներին RS տրիգերի S մուտքում հայտնվում է լարման բարձր մակարդակ, ինչի հետևանքով տրիգերի Q ելքում սահմանվում է լարման բարձր մակարդակ: Դրան հաջորդում է C կոնդենսատորի լիցքավորում R1 դիմադրության միջոցով և երբ լարումը կոնդենսատորի վրա հասնում է տրիգերի համար շեմային արժեքին, տրիգերը վերադառնում է սկզբնական վիճակին` քանի որ C -ի լարումը տրվում է տրիգերի R մուտքին: 1 և 2 մետաղական թիթեղների մեկուսացվածության դեպքում S մուտքին հայտնվում է լարման ցածր մակարդակ R4 դիմադրության միջոցով:
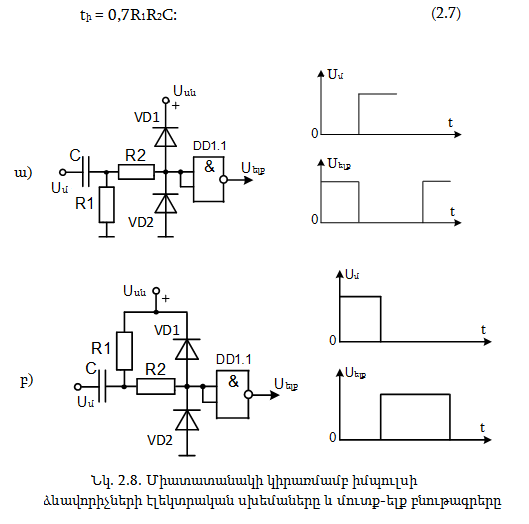
Գոյություն ունեն բազմազան սխեմաներ, որոնց միջոցով հնարավոր է դառնում ձևավորել ելքային կարճատև ուղղանկյուն իմպուլս անհրաժեշտ տևողությամբ մուտքային իմպուլսի ճակատի կամ հատվածքի դեպքում: Այդպիսի ապարատներից է սպասող տատանակը (միատատանակ): Նկար 2.8ա -ում բերված էլեկտրական սխեմայի միջոցով ելքում ձևավորվում է իմպուլս մուտքային իմպուլսի ճակատի դեպքում, իսկ նկ. 2.8.բ -ի դեպքում` հատվածքի դեպքում: Նկարում պատկերված են նաև էլեկտրական սխեմաների մուտքում և ելքում իմպուլսների բնույթն ըստ ժամանակի:
Բերված սխեմաներում VD1 և VD2 դիոդները պաշտպանիչ են, իսկ R2 դիմադրությունը սահմանափակում է C կոնդենսատորով և դիոդով անցնող հոսանքների մեծությունները:
Ելքային իմպուլսի tի տևողությունը որոշվում է հետևյալ կերպ`
2.2.2. ԷԼԵԿՏՐԱԿԱՆ ԻՄՊՈՒԼՍՆԵՐԻ ԳԵՆԵՐԱՏՈՐՆԵՐ
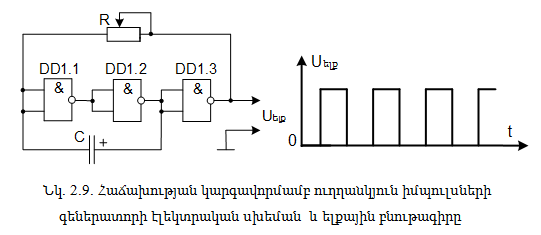
Տրամաբանական սարքերի և թվային տարրերի վրա ստեղծվում են բազմազան իմպուլսների գեներատորային սխեմաներ, որոնք ունեն լայն կիրառություն կառավարման տեխնիկայում: Գեներատորները սարքեր են, որոնք հաստատուն լարման աղբյուրի էներգիան բեռի վրա կերպափոխում են կոնկրետ տեսքի և պարամետրերով էլեկտրական տատանողական էներգիայի:
Նկար
2.9 -ում պատկերված
է
ուղղանկյուն
ազդանշանների
գեներատոր
Եվ-Ոչ
երկմուտքանի
թվային
տարրերի
հիման
վրա:
Այդտեղ
իմպուլսի
հաճախությունը
պայմանավորված
է
R և C տարրերի
արժեքներով
և
որոշվում
է![]() արտահայտությամբ:
R փոփոխական
դիմադրության
միջոցով
հնարավոր
է
կարգավորել
գեներատորի
ելքային
իմպուլսների
հաճախությունը:
Նկարում
պատկերված
է
նաև
էլեկտրական
սխեմայի
ելքում
իմպուլսների
բնույթն
ըստ
ժամանակի:
արտահայտությամբ:
R փոփոխական
դիմադրության
միջոցով
հնարավոր
է
կարգավորել
գեներատորի
ելքային
իմպուլսների
հաճախությունը:
Նկարում
պատկերված
է
նաև
էլեկտրական
սխեմայի
ելքում
իմպուլսների
բնույթն
ըստ
ժամանակի:
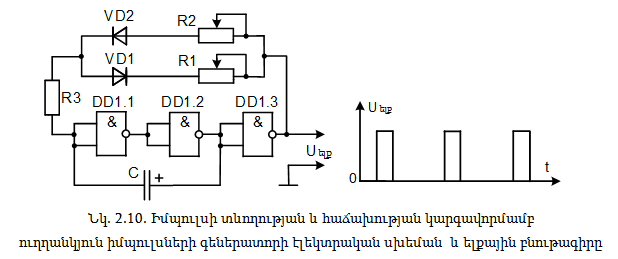
Նկար 2.10 -ում պատկերված գեներատորում ուղղանկյուն իմպուլսների տևողությունը կարգավորվում է R1 փոփոխական դիմադրության միջոցով, իսկ հաճախությունը` R2 -ով: C կոնդենսատորի որոշակի արժեքի դեպքում վերը նշված պարամետրերը փոփոխվում են որոշակի միջակայքում, իսկ C -ի այլ արժեքի դեպքում այդ պարամետրերը կփոխվեն այլ միջակայքում:
Մեծ կիրառություն ունեն սինուսոիդական իմպուլսների գեներատորները, որոնք կառուցվում են LC կամ RC կոնտուրների հիման վրա:
LC տատանողական կոնտուրում տեղի է ունենում էներգիայի անընդհատ փոխանակություն կոնտուրի C կոնդենսատորի և L փաթույթի միջև և պարբերության ընթացքում սովորաբար ծախսվում է աղբյուրից ստացված էներգիայի մի փոքր մասը:
LC գեներատորները նախատեսված են բարձր հաճախությամբ իմպուլսների գեներացիայի համար, իսկ RC -ն` ցածր հաճախությունների համար: LC կոնտուրի վրա կառուցվող գեներատորների սխեմաները բազմազան են և կարող են տարբերվել ուժեղարարի սխեմայով` ըստ LC կոնտուրի միացման սկզբունքի և ըստ դրական հետադարձ կապի ձևի:
Դիտարկենք LC գեներատորի տարբերակներից մեկը (նկ. 2.11): Այն իրականացված է ընդհանուր էմիտերով տրանզիստորային ուժեղարարի սխեմայի վրա: R1, R2, R3 և C3 էլեմենտները նախատեսված են տրանզիստորի հանգստի ռեժիմի ապահովման և ջերմաստիճանային կայունացման համար: Ելքային ազդանշանը հանվում է տրանզիստորի կոլեկտորից: Բեռի մաքուր ակտիվ բնույթի դեպքում ելքային և մուտքային իմպուլսները հակափուլում են:
Տատանողական կոնտուրի պարամետրերը պայմանավորված են C1 կոնդենսատորի ունակությամբ, տրանսֆորմատորի առաջնային փաթույթի w1 գալարներով և L ինդուկտիվությամբ: Հետադարձ կապի ազդանշանը հանվում է w2 գալարներով T տրանսֆորմատորի երկրորդային փաթույթից, որը M ինդուկտիվ կապի մեջ է w1 -ի հետ և C2 -ի միջոցով տրվում է տրանզիստորի մուտքին: Գեներատորի ելքային իմպուլսի ամպլիտուդն ավելի մեծ է, քան հետադարձ կապինը, հետևաբար տրանսֆորմատորը պետք է լինի ցածրացնող, այսինքն` w1> w2:
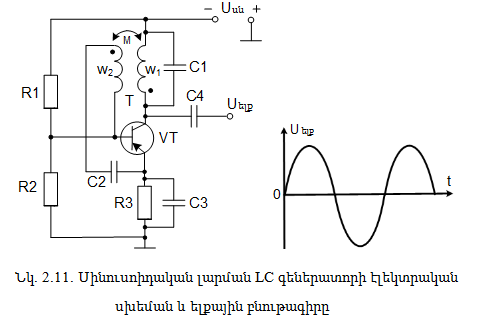
Գեներատորի ելքային լարման տատանման f հաճախությունը կախված է L1 և C1 արժեքներից և մոտավորապես հավասար է այդ կոնտուրի սեփական տատանման հաճախությանը (ռեզոնանսային հաճախություն),
![]()
իսկ հաճախության կայունությունը պայմանավորված է L1C1 կոնտուրի և VT տրանզիստորի պարամետրերի կայունությամբ:
Ցածր հաճախություններ ստանալու դեպքում պահանջվում է L -ի և C -ի մեծ արժեքներ, ինչը հանգեցնում է գեներատորի չափսերի, կշռի և ինքնարժեքի մեծացման, որով պայմանավորված` ցածր հաճախություններ ստանալու համար կիրառվում են RC շղթաներ:
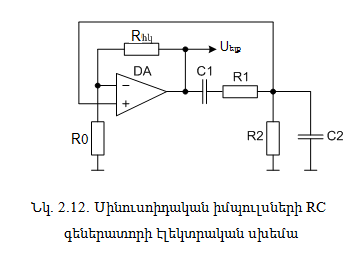
RC գեներատորի օրինակ է բերված նկ. 2.12 -ում, որը կառուցված է հաստատուն հոսանքի DA օպերացիոն ուժեղարարի վրա: Մուտքային R0 և հետադարձ կապի Rհկ դիմադրությունները նախատեսված են անհրաժեշտ ուժեղացման գործակից ստանալու համար, որը որոշվում է`
![]()
Գեներատորի ինքնագրգռումն առաջանում է, երբ Kուժ>2, իսկ հաճախությունը որոշվում է հետևյալ կերպ.
![]()
Գեներատորի ելքում լարման անհրաժեշտ ամպլիտուդ ստանալու համար պետք է կարգավորել R0 և Rհկ -ի արժեքները:
![]()
Գեներատորների հաճախության կայունացման վրա ազդում են մի շարք գործոններ, որոնցից պետք է նշել.
- սնման աղբյուրի լարման տատանումները,
- շրջապատի ջերմաստիճանը և խոնավությունը,
- մեխանիկական ազդեցությունները,
- բեռի փոփոխությունները:
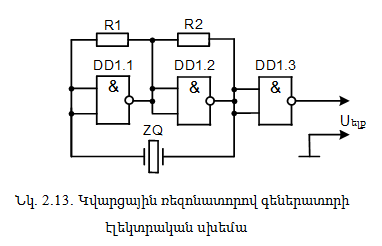
Հաճախության ավելի բարձր կայունություն կարելի է ստանալ կվարցային գեներատորների սխեմաներում, որտեղ որպես կայուն պարամետրերով բարձրորակ տատանողական կոնտուր օգտագործվում է պիեզոէլեկտրական հատկություն ունեցող կվարցային բյուրեղը` կվարցային ռեզոնատորը:
Յուրաքանչյուր կվարցային բյուրեղ ունի իր սեփական ռեզոնանսային (մեխանիկական) տատանումների հաճախությունը, որի կայունությունը մի քանի միլիոն անգամ գերազանցում է LC և RC կոնտուրներով գեներատորների հաճախությունների կայունությանը: Հաճախության այդ մեծությունը պայմանավորված է բյուրեղի չափսերով:
Կվարցի բարորակությունը հասնում է մի քանի հարյուր հազարի, իսկ LC կոնտուրինը` մի քանի տասնյակի կամ հարյուրի:
Կվարցային ZQ ռեզոնատորով և Եվ-Ոչ տրամաբանական տարրերով կառուցված ուղղանկյուն իմպուլսների գեներատորի մի տարբերակի էլեկտրական սխեմա բերված է նկ. 2.13 -ում:
Էլեկտրոնային ապարատներում բեռի հոսանքի կոմուտացումն իրականացվում է էլեկտրոնային տարրերի միջոցով (դիոդ, տրանզիստոր, թիրիստոր), որոնք աշխատում են բանալիային ռեժիմում: Այդ ռեժիմում էլեկտրոնային բանալին կարող է գտնվել երկու վիճակից մեկում. փակ (մեխանիկական բանալու բաց ռեժիմ), որի դեպքում տարրի ներքին դիմադրությունը շատ մեծ է, իսկ հոսանքը կոմուտացվող շղթայում մոտ է զրոյին, կամ բաց (մեխանիկական բանալու փակ ռեժիմ), որի դեպքում տարրի ներքին դիմադրությունը շատ փոքր է, և հոսանքը կոմուտացվող շղթայում ունի առավելագույն արժեք:
Բանալու անցումը մի վիճակից մյուսին կատարվում է թռիչքով` կառավարող ազդանշանի կիրառումով, որտեղ փոքր հզորության կորուստներն ապահովում են օգտակար գործողության գործակցի (ՕԳԳ) բարձր արժեք, որը սովորաբար կազմում է 90 % և ավելի:
Բանալիային սխեմաները լայնորեն օգտագործվում են էլեկտրոնային ռելեներում, կերպափոխիչներում, կարգավորիչներում, կառավարման ապարատներում և այլուր: Մեծ կիրառում են գտել երկբևեռ տրանզիստորներով բանալիները:
3. ԷԼԵԿՏՐՈՆԱՅԻՆ ԲԱՆԱԼԻՆԵՐ
Էլեկտրոնային ապարատներում բեռի հոսանքի կոմուտացումն իրականացվում է էլեկտրոնային տարրերի միջոցով (դիոդ, տրանզիստոր, թիրիստոր), որոնք աշխատում են բանալիային ռեժիմում: Այդ ռեժիմում էլեկտրոնային բանալին կարող է գտնվել երկու վիճակից մեկում. փակ (մեխանիկական բանալու բաց ռեժիմ), որի դեպքում տարրի ներքին դիմադրությունը շատ մեծ է, իսկ հոսանքը կոմուտացվող շղթայում մոտ է զրոյին, կամ բաց (մեխանիկական բանալու փակ ռեժիմ), որի դեպքում տարրի ներքին դիմադրությունը շատ փոքր է, և հոսանքը կոմուտացվող շղթայում ունի առավելագույն արժեք:
Բանալու անցումը մի վիճակից մյուսին կատարվում է թռիչքով` կառավարող ազդանշանի կիրառումով, որտեղ փոքր հզորության կորուստներն ապահովում են օգտակար գործողության գործակցի (ՕԳԳ) բարձր արժեք, որը սովորաբար կազմում է 90 % և ավելի:
Բանալիային սխեմաները լայնորեն օգտագործվում են էլեկտրոնային ռելեներում, կերպափոխիչներում, կարգավորիչներում, կառավարման ապարատներում և այլուր: Մեծ կիրառում են գտել երկբևեռ տրանզիստորներով բանալիները:
3.1. ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԲԱՆԱԼԻՆԵՐ
Եթե կառավարման ազդանշանը փոխվի թռիչքաձև այնպիսի միջակայքում, որ ապահովի տրանզիստորի անցումը անջատված ռեժիմից բաց և հագեցված ռեժիմ և հակառակը, ապա միաստիճան ուժեղարարը կդառնա ամենապարզ էլեկտրոնային (անհպակ) բանալի: Հագեցած կամ անջատված ռեժիմներում տրանզիստորը գտնվում է երկար ժամանակ, իսկ ակտիվում` կարճ: Տրանզիստորային թվային և ազդանշանային տեխնիկան հիմնված է բանալիային ռեժիմով աշխատող տրանզիստորային բանալիների վրա:
Երկբևեռ տրանզիստորների հիման վրա կառուցվում են սխեմաներ, որոնք աշխատում են բանալիային ռեժիմով, այսինքն` կամ փակ են (բեռը անջատված է սնման աղբյուրից), կամ բաց են (բեռը միացված է սնման աղբյուրին):
Եթե տրանզիստորն օգտագործվում է սահմանային թույլատրելի պարամետրերով, բանալիային ռեժիմի դեպքում տրանզիստորի վրայի հզորությունը չի գերազանցում տրանզիստորի թույլատրելի հզորությանը, որի համար էլ տրանզիստորային բանալին գործում է առանց ջերմահեռացման հատուկ սարքավորումների կիրառման:
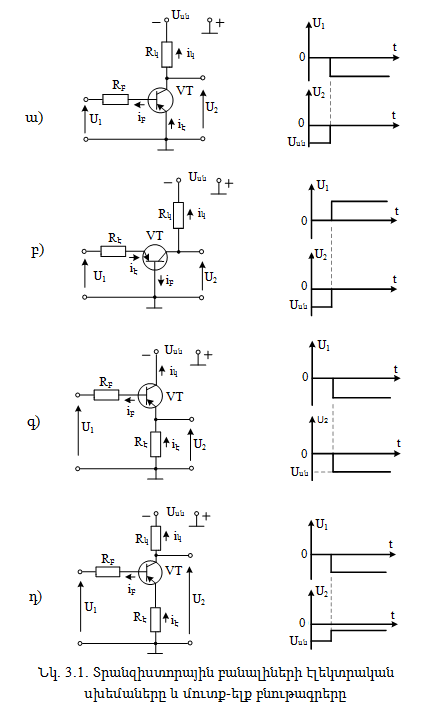
Նկար 3.1 -ում բերված են երկբևեռ p-n-p կիսահաղորդչային կառուցվածքով տրանզիստորի վրա բանալիային սխեմաները և u1 մուտքի ու u2 ելքի լարումների բնութագրերն ըստ t ժամանակի: Եթե սխեմաներում կիրառվի n-p-n կիսահաղորդչային կառուցվածքով տրանզիստոր, կփոխվեն սնման և մուտքային լարումների բևեռականությունները, իսկ հոսանքների ուղղությունները կլինեն հակառակ:
Նկար
3.1ա -ում
պատկերված
բանալիային
սխեման
կոչվում
է
ընդհանուր
էմիտերային
և
այն
հաճախ
է
կիրառվում:
Սրա
առանձնահատկությունն
այն
է,
որ
մուտքային
u1
ազդանշանի
փուլը
բանալու
ելքում
փոխվում
է
հակադրությամբ,
այսինքն`
![]() Ըստ
բնութագրերի
մուտքային
u1 լարման
բարձր
մակարդակի
դեպքում,
ելքում
ստացվում
է
ցածր`
Ըստ
բնութագրերի
մուտքային
u1 լարման
բարձր
մակարդակի
դեպքում,
ելքում
ստացվում
է
ցածր`
![]() մակարդակ,
քանի
որ
տրանզիստորը
գտնվում
է
անջատված
վիճակում:
Մուտքային
u1 լարման
ցածր
մակարդակի
դեպքում
ելքում
ստացվում
է
բարձր
մակարդակ`
մակարդակ,
քանի
որ
տրանզիստորը
գտնվում
է
անջատված
վիճակում:
Մուտքային
u1 լարման
ցածր
մակարդակի
դեպքում
ելքում
ստացվում
է
բարձր
մակարդակ`![]() քանի
որ
տրանզիստորը
գտնվում
է
հագեցած
վիճակում:
Այս
տարբերակում
բազային
հոսանքի
փոխանցման
քանի
որ
տրանզիստորը
գտնվում
է
հագեցած
վիճակում:
Այս
տարբերակում
բազային
հոսանքի
փոխանցման![]() գործակիցը
զգալիորեն
մեծ
է
1 -ից, հետևաբար,
տեղի
է
ունենում
բազային
հոսանքի
ուժեղացում:
Եթե
բանալու
մուտքային
դիմադրության
և
բեռի
դիմադրության
հարաբերությունը
փոքր
է
գործակիցը
զգալիորեն
մեծ
է
1 -ից, հետևաբար,
տեղի
է
ունենում
բազային
հոսանքի
ուժեղացում:
Եթե
բանալու
մուտքային
դիմադրության
և
բեռի
դիմադրության
հարաբերությունը
փոքր
է![]() արժեքից,
ապա
տեղի
է
ունենում
ազդանշանի
ուժեղացում
նաև
ըստ
լարման:
արժեքից,
ապա
տեղի
է
ունենում
ազդանշանի
ուժեղացում
նաև
ըստ
լարման:
Նկար
3.1բ -ում
բերված
է
ընդհանուր
բազայով
տրանզիստորային
բանալու
միացման
սխեման,
որտեղ
կառավարումն
իրականացվում
է
ըստ
էմիտերային
հոսանքի:
Էմիտերային
հոսանքի
փոխանցման
![]() գործակիցը
փոքր
է
մեկից,
հետևաբար,
այստեղ
տեղի
չի
ունենում
ուժեղացում
ըստ
հոսանքի,
այսինքն`
կառավարման
հոսանքը
միշտ
մեծ
է
բեռի
հոսանքից:
գործակիցը
փոքր
է
մեկից,
հետևաբար,
այստեղ
տեղի
չի
ունենում
ուժեղացում
ըստ
հոսանքի,
այսինքն`
կառավարման
հոսանքը
միշտ
մեծ
է
բեռի
հոսանքից:
Եթե
բանալու
մուտքային
դիմադրության
հարաբերությունը
բեռի
դիմադրությանը
փոքր
է
![]() ից,
ապա
տեղի
է
ունենում
լարման
ուժեղացում:
Այս
սխեմայում
տրանզիստորը
մտնում
է
հագեցած
ռեժիմ
մուտքային
մեծ
u1
լարման
դեպքում,
և
այդ
ժամանակ
ելքում
նույնպես
ստացվում
է
բարձր
մակարդակ`
ից,
ապա
տեղի
է
ունենում
լարման
ուժեղացում:
Այս
սխեմայում
տրանզիստորը
մտնում
է
հագեցած
ռեժիմ
մուտքային
մեծ
u1
լարման
դեպքում,
և
այդ
ժամանակ
ելքում
նույնպես
ստացվում
է
բարձր
մակարդակ`![]() u1
լարման
փոքր
արժեքի
դեպքում
տրանզիստորը
փակվում
է
և
ելքում
ստացվում
է
ցածր
մակարդակ
u1
լարման
փոքր
արժեքի
դեպքում
տրանզիստորը
փակվում
է
և
ելքում
ստացվում
է
ցածր
մակարդակ
![]() Չնայած
մուտքային
և
ելքային
լարումներն
ունեն
տարբեր
բևեռականություն,
բայց
ընդհանուր
բազայով
բանալին
չի
կատարում
մուտքային
լարման
փուլաշրջում,
այլ
կատարում
է
կրկնման
գործողություն:
Չնայած
մուտքային
և
ելքային
լարումներն
ունեն
տարբեր
բևեռականություն,
բայց
ընդհանուր
բազայով
բանալին
չի
կատարում
մուտքային
լարման
փուլաշրջում,
այլ
կատարում
է
կրկնման
գործողություն:
Նկար 3.1գ -ում բերված է ընդհանուր կոլեկտորով բանալու սխեման: Սա նույնպես կատարում է կրկնման գործողություն և ուժեղացում ըստ հոսանքի, իսկ ըստ լարման ուժեղացում չի կատարում, այսինքն` բանալիային ռեժիմում անհրաժեշտ u1 լարման անկումը կարող է զգալիորեն գերազանցել ելքային u2 լարման անկմանը:
Բերված երեք սխեմաներից բացի, կիրառվում է նաև չորրորդ սխեման (նկ. 3.1դ), որտեղ տրանզիստորի երեք էլեկտրոդներին միացված է երեք դիմադրություն և այդ տարբերակը կոչվում է աստղ-բանալի: Աստղ-բանալին նախորդ երեք սխեմաների համակցված տարբերակն է: Այդտեղ ելքային u2 լարումը միշտ հանվում է կոլեկտորից, և բանալին կատարում է մուտքային լարման փուլաշրջում:
Նշված բանալիային սխեմաներից ամենատարածվածն ընդհանուր էմիտերային սխեման է, որի դեպքում ապահովվում են` բանալու փոքր ծավալ, մեծ ՕԳԳ, ըստ հզորության մեծ ուժեղացման գործակից, տրանզիստորի օգտագործման գործակցի մեծ արժեք:
Ստատիկ
ռեժիմում
տրանզիստորային
բանալու
աշխատանքը
դիտարկենք
ընդհանուր
էմիտերով
բանալու
ելքային
բնութագրի
հիման
վրա:
Տրանզիստորը
կարող
է
գտնվել
բաց
և
հագեցած
կամ
փակ
վիճակում:
Բեռնավորման
գծի
և
տրանզիստորի
բնութագծերի
հատման
կետերը
բնորոշում
են
հոսանքները
տրանզիստորով
և
բեռով,
ինչպես
նաև
լարումները
դրանց
վրա:
Տրանզիստորի
փակ
աշխատանքային
ռեժիմի
դեպքում
էմիտերային
անցումը
փակ
է,
և
դրանով
հոսանք
համարյա
չի
անցնում:
Միաժամանակ
փակ
է
նաև
կոլեկտորային
անցումը,
սակայն
դրանով
անցնում
է
կիսահաղորդչային
անցման
ջերմային
հոսանքը:
Բեռնավորման
գծի
վրա
տրանզիստորի
փակ
վիճակին
համապատասխանում
է
1
կետը,
որը
բնութագրվում
է
տրանզիստորի
կոլեկտոր-էմիտեր
լարման
առավելագույն
արժեքով`
![]() և
նվազագույն
Iկ0
հոսանքով:
և
նվազագույն
Iկ0
հոսանքով:
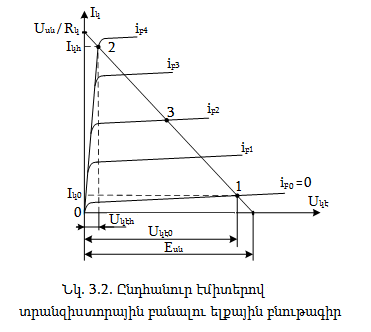
Տրանզիստորի
բաց
հագեցած
վիճակին
բեռնավորման
գծի
վրա
համապատասխանում
է
2
կետը,
որը
բնութագրվում
է
տրանզիստորի
կոլեկտոր-էմիտեր
լարման
նվազագույն
արժեքով`
![]() և
կոլեկտորային
առավելագույն
Iկհ
հոսանքով`
և
կոլեկտորային
առավելագույն
Iկհ
հոսանքով`
![]()
Տրանզիստորի փակ վիճակից հագեցած վիճակի կամ հակառակն անցումը կատարվում է ոչ ակնթարթորեն, այլ որոշակի ժամանակահատվածում: Տրանզիստորի փոխանջատման ժամանակը պայմանավորված է տրանզիստորի և սխեմայի պարամետրերով:
3.2. ԱՐԱԳԱԳՈՐԾՈՒԹՅԱՆ ԲԱՐՁՐԱՑՈՒՄԸ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԲԱՆԱԼԻՈՒՄ
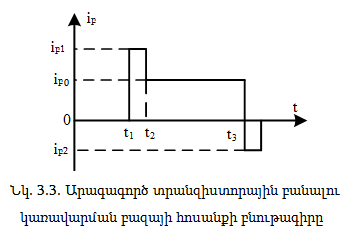
Տրանզիստորային բանալու հատկություններին ներկայացվող հիմնական պահանջներից է արագագործությունը, որի մեծացման համար անհրաժեշտ է փոքրացնել տրանզիստորի բացման և փակման անցողիկ երևույթների ժամանակները: Նշված նպատակով բանալին պետք է կառավարել նկ. 3.3 -ում բերված տեսքի իմպուլսով, ըստ որի տրանզիստորի կառավարման` բազայի iբ ուղիղ հոսանքը բացելիս և հակառակ հոսանքը փակելիս պետք է ունենան կարճատև թռիչքներ:
Բանալու արագագործության մեծացման հիմնական տարբերակներից են ունակության կիրառումը, Շոտկիի տրանզիստորը կամ հոսանքի փոխակերպիչը:
Վերը նշված կառավարման հոսանքի ստացման պարզ սխեմային տարբերակ է բերված նկ. 3.4ա -ում, որտեղ ընդհանուր էմիտերային բանալու բազայի Rբ դիմադրությանը զուգահեռ միացված է C կոնդենսատորը, իսկ նկ. 3.4բ -ում` տրանզիստորի կառավարման և բազայի շղթայի հոսանքների փոփոխման բնույթն ըստ t ժամանակի:
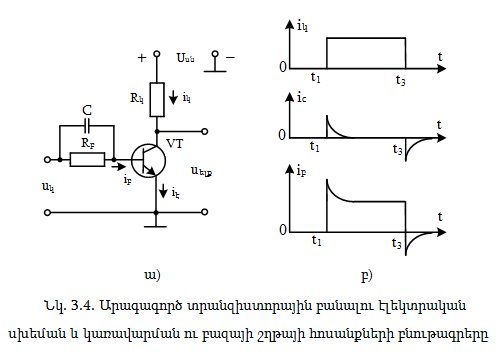
Կառավարման
ազդանշանի
հայտնվելու
t1 պահին
բազայի
հոսանքը
փակվում
է
կոնդենսատորով,
քանի
որ
անցողիկ
պահին
կոնդենսատորի
դիմադրությունը
շատ
փոքր
է,
ինչի
հետևանքով
բազայի
հոսանքն
ունենում
է
մեծ
արժեք`
պայմանավորված
կառավարման
աղբյուրի
լարման
uկ արժեքով
և
ներքին
Rն դիմադրությամբ`
![]() Շնորհիվ
մեծ
հոսանքի`
արագանում
է
տրանզիստորի
բացումը:
Կոնդենսատորը
լիցքավորվելուց
հետո
բազայի
հոսանքը
փոքրանում
է
և
մեծությունը
պայմանավորվում
է
Rբ դիմադրությամբ`
Շնորհիվ
մեծ
հոսանքի`
արագանում
է
տրանզիստորի
բացումը:
Կոնդենսատորը
լիցքավորվելուց
հետո
բազայի
հոսանքը
փոքրանում
է
և
մեծությունը
պայմանավորվում
է
Rբ դիմադրությամբ`
![]()
Կառավարման
ազդանշանի
ավարտին`
t3 պահին,
հաջորդում
է
կոնդենսատորի
լիցքաթափումը
տրանզիստորի
բազայի
շղթայով`
ստեղծելով
մեծ
փակման
հոսանք`
պայմանավորված
կոնդենսատորի
uc լարմամբ
և
Rն դիմադրությամբ`
![]() Այդ
հոսանքն
արագացնում
է
տրանզիստորի
փակվելը:
Այդ
հոսանքն
արագացնում
է
տրանզիստորի
փակվելը:
3.3. ԿԱԶՄԱԾՈՒ ՏՐԱՆԶԻՍՏՈՐՆԵՐ
Ըստ հոսանքի մեծ ուժեղացման գործակից և մուտքային մեծ դիմադրություն ապահովելու համար կարելի է երկու տրանզիստոր միացնել` համաձայն նկ. 3.5 -ի, որոնք կոչվում են կազմածու տրանզիստոր, կամ բաղադրյալ տրանզիստոր:
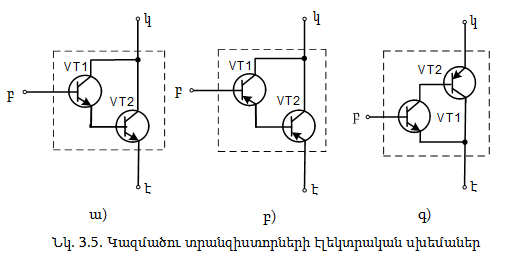
Նկարում
բերված
առաջին
երկու
տարբերակում
տրանզիստորներից
մեկի
բազային
և
մյուսի
էմիտերային
հոսանքները
նույնն
են,
իսկ
կոլեկտորային
հոսանքը`
առանձին
տրանզիստորների
կոլեկտորային
հոսանքների
գումարը:
Տրանզիստորների
այդպիսի
միացումներն
անվանվում
են
ըստ
Դարլինգտոնի:
Նկարի
(ա) տարբերակում
երկու
տրանզիստորներն
ըստ
կիսահաղորդչային
կառուցվածքի
n-p-n
են,
իսկ
բ-ում`
p-n-p: Միացված
երկու
տրանզիստորը
դառնում
է
որպես
մեկ
տրանզիստոր,
որի
ուժեղացման
![]() գործակիցն
ըստ
հոսանքի
որոշվում
է
առանձին
տրանզիստորների
ըստ
հոսանքի
ուժեղացման
գործակիցների
արտադրյալով`
գործակիցն
ըստ
հոսանքի
որոշվում
է
առանձին
տրանզիստորների
ըստ
հոսանքի
ուժեղացման
գործակիցների
արտադրյալով`![]()
Այդպիսի միացումները կիրառվում են մեծ հոսանքների դեպքում, քանի որ ապահովում են առանձին տրանզիստորների հաղորդականությունից ելքային ավելի մեծ հաղորդականություն: Կազմածու տրանզիստորի սահմանային հաճախականությունը պայմանավորվում է կազմում առկա ցածր հաճախության տրանզիստորի հաճախականությամբ:
Կազմածու տրանզիստոր կառուցվում է նաև n-p-n և p-n-p տրանզիստորների հիման վրա, որը մեկ ամբողջական, հզոր և մեծ ուժեղացման գործակցով n-p-n կառուցվածքի տրանզիստոր է, և կոչվում է Շիկլայի տրանզիստոր (նկ. 3.5գ):
Կազմածու տրանզիստորներում միացվող տրանզիստորների քանակը կարող է լինել երկուսից ավելի` պայմանավորված ներկայացվող ուժեղացման գործակցի արժեքով:
Բանալիային ռեժիմով աշխատող կազմածու սխեմաներ կառուցվում են նաև դաշտային տրանզիստորների հիման վրա` երկբևեռ տրանզիստորների սխեմաների սկզբունքով: Դաշտային ՄՈՍՖԵԹ (MOSFET`Metal-Oxide-Semiconductor-Field-Effect-Transistor) տրանզիստորներով սխեմաներն ունեն իրենց առավելությունները, որոնցից են.
- մեծ մուտքային դիմադրությունը, փոքր մուտքային հոսանքը և հզորությունը: Մուտքային փոքր հզորությունը թույլ է տալիս մեծ հզորության բանալին կառավարել անմիջապես միկրոսխեմայի տրամաբանական տարրերից,
- բաց վիճակում ունեն փոքր, իսկ փակ վիճակում` շատ մեծ դիմադրություն,
- ունեն փոխանջատման մեծ արագություն,
- հուսալի են աշխատում ըստ թույլատրելի առավելագույն հոսանքի և լարման:
Երկբևեռ մեկուսացված փականով ԱյՋիԲիԹի (IGBT`Isoiated Gate Bipolar Transistor) տրանզիստորները մեկ բյուրեղի վրա ընդգրկում են կազմածու հզոր երկբևեռ և կառավարվող ՄՈՍՖԵԹ տրանզիստորներ ու դիտվում` որպես մեկ տրանզիստոր: Դրանք ունեն ՄՈՍՖԵԹ -ի կառավարման պարզությունը, մեծ մուտքային դիմադրություն, փոքր լարման անկում միավոր մակերեսի վրա, մեծ ուժեղացում ըստ հոսանքի և ելքային մեծ հզորություն, սակայն ունեն ցածր արագագործություն:
4. ԷԼԵԿՏՐՈՆԱՅԻՆ ՈՒԺԵՂԱՐԱՐՆԵՐ
ՈՒժեղարարները սարքեր են, որոնք կիրառվում են ավտոմատիկայում, կառավարման, հսկման և չափիչ համակարգերում և նախատեսված են մեծացնելու մուտքային ազդանշանի էլեկտրական պարամետրերը, ինչը կատարվում է սնման աղբյուրի էներգիայի հաշվին: Համապատասխան ուժեղացվող ազդանշանի պարամետրի ուժեղարարները բաժանվում են երեք խմբի` լարման, հոսանքի և հզորության: Լարման էլեկտրոնային ուժեղարարներից դիտարկենք տրանզիստորայինները, որոնք ունեն լայն կիրառություն և սխեմային լուծումներով ու գործառական հնարավորություններով բազմազան են:
4.1. ՄԻԱՍՏԻՃԱՆ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՈՒԺԵՂԱՐԱՐ
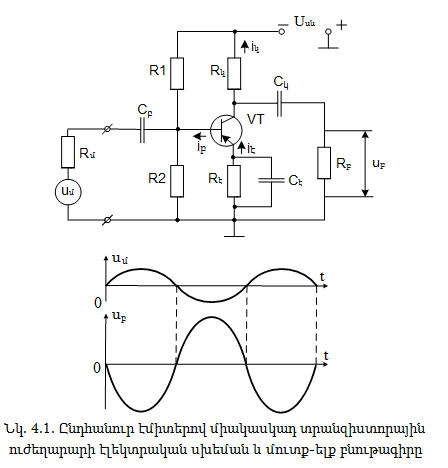
Տրանզիստորի
ընդհանուր
էմիտերով
միացմամբ
միակասկադ
ուժեղարարն
ամենատարածվածն
է
(նկ. 4.1), որտեղ
VT
տրանզիստորը
և
բեռը
հաջորդաբար
միացված
են
Uսն
սնման
աղբյուրին:
Մուտքային
uմ
փոփոխական
ազդանշանը
Rմ
մուտքային
դիմադրության
և
բաժանիչ
Cբ
կոնդենսատորի
միջոցով
տրվում
է
VT
տրանզիստորի
բազային:
Տրանզիստորի
կոլեկտորի
վրա
ստացվում
է
տրանզիստորի
կողմից
ուժեղացված
ազդանշանը,
որը
Cկ
բաժանիչ
կոնդենսատորով
տրվում
է
Rբ
բեռին: Մուտքային
և
ելքային
լարումների
միջև
առաջանում
է
![]() փուլային
շեղում:
փուլային
շեղում:
Բաժանիչ Cբ կոնդենսատորն արգելում է սնման աղբյուրի հաստատուն հոսանքի մուտքը մուտքային աղբյուր: Եթե Cբ կոնդենսատորը բացակայի, հաստատուն հոսանքը կառաջացնի տրանզիստորի աշխատանքային ռեժիմի փոփոխում և մուտքային աղբյուրի տաքացում:
Բաժանիչ Cկ կոնդենսատորը նախատեսված է տրանզիստորի ելքային շղթայի և բեռի շղթայի բաժանում` ըստ կոլեկտորային հաստատուն հոսանքի, որի շնորհիվ բեռի շղթա է անցնում միայն ուժեղացված փոփոխական լարումը:
Բաժանիչ կոնդենսատորների արժեքն ընտրվում է այնպես, որ մուտքային հաճախության դեպքում դրանց դիմադրությունները լինեն շատ փոքր համապատասխանաբար ուժեղարարի մուտքային դիմադրությունից և բեռի դիմադրությունից:
Բաժանիչ R1 և R2 դիմադրություններով սահմանվում է տրանզիստորի աշխատանքային կետի դիրքը հանգստի ռեժիմում` մինչ մուտքային փոփոխական ազդանշանի հայտնվելը: Միակասկադ փոփոխական լարման ուժեղարարի աշխատանքային կետը պետք է գտնվի բնութագրի ակտիվ տիրույթում (նկ. 3.2 դիրք 3):
Էմիտերային Rէ դիմադրությունն ապահովում է բացասական հետադարձ կապ, ինչն անհրաժեշտ է ուժեղարարի հանգստի ռեժիմի կայունացման համար շրջապատի ջերմաստիճանի փոփոխման դեպքում: Cէ կոնդենսատորը շունտում է Rէ դիմադրությանն ըստ փոփոխական հոսանքի` բացառելով դրանով ըստ փոփոխական բաղադրիչի հետադարձ կապ: Cէ կոնդենսատորի բացակայությունը կհանգեցնի ուժեղարարի ուժեղացման գործակցի փոքրացմանը:
ՈՒժեղարարը բնութագրող հիմնական պարամետրերի որոշումը.
- մուտքային դիմադրությունը`
![]()
- ուժեղացման գործակիցն ըստ լարման`
![]()
- ուժեղացման գործակիցն ըստ հոսանքի`
![]()
- ուժեղացման գործակիցն ըստ հզորության`
![]()
որտեղ![]() համապատասխանաբար
մուտքային
և բեռի
լարման
և
հոսանքի
ամպլիտուդային
արժեքներն
են:
համապատասխանաբար
մուտքային
և բեռի
լարման
և
հոսանքի
ամպլիտուդային
արժեքներն
են:
Միակասկադ ուժեղարարներ կառուցվում են նաև տրանզիստորի մյուս տեսակի միացումների հիման վրա:
Մուտքային ազդանշանի ուժեղացման գործակցի մեծացման համար կարելի է միակասկադ ուժեղարարները միացնել հաջորդաբար, որը կոչվում է բազմակասկադ ուժեղարար: Բազմակասկադ ուժեղարարի ուժեղացման գործակիցը դառնում է հավասար առանձին ուժեղարարների ուժեղացման գործակիցների արտադրյալին:
4.2. ՀԶՈՐՈՒԹՅԱՆ ՈՒԺԵՂԱՐԱՐՆԵՐ
Հզորության ուժեղարարները էլեկտրոնային ապարատի ելքային կասկադն են և դրանց միջոցով է ապահովվում անհրաժեշտ հզորությունը բեռի վրա: Դրանք պետք է ունենան հնարավորին չափով մեծ ՕԳԳ և թույլատրելիից ոչ ավել գծային աղավաղումների մակարդակ:
Հզորության ուժեղարարները բնութագրվում են հիմնականում հետևյալ պարամետրերով. ելքային հզորություն, ՕԳԳ, ոչ գծային աղավաղումների գործակից:
Հզորության ուժեղարարներն առանձնանում են սխեմային տեսականիով, քանի որ դրանք կառուցվում են երկբևեռ և դաշտային տրանզիստորների վրա:
Փոքր աղավաղումներ ստանալու համար կիրառվում են A դասի հզորության ուժեղարարներ, սակայն դրանք ունեն փոքր ՕԳԳ, քանի որ սնման աղբյուրից օգտագործում են մեծ հզորություն: Մեծ ՕԳԳ ստանալու համար կիրառվում են B դասի հզորության ուժեղարարները, սակայն այդ դեպքում աճում են ոչ գծային աղավաղումները: Երբեմն կիրառվում են AB դասի հզորության ուժեղարարները, որոնք գրավում են միջանկյալ դիրք A և B դասի հզորության ուժեղարարների միջև: Դրանցում զգալիորեն նվազում է ոչ գծային աղավաղումների մակարդակը: B և AB դասերում աշխատող հզորության ուժեղարարներում ոչ գծային աղավաղումները նվազեցնելու նպատակով օգտագործվում են երկտակտ հզորության ուժեղարարներ:
Երկտակտ հզորության ուժեղարարները բաղկացած են երկու միատակտ ուժեղարարից, որոնք աշխատում են մեկ ընդհանուր բեռով և հզորացնում են միևնույն մուտքային աղբյուրի նշանափոխ փոփոխական լարումը:
Հզորության ուժեղարարում ընդհանուր էմիտերով տրանզիստորի միացումն ամենակիրառելին է, քանի որ ապահովում է հզորության մեծ ուժեղացման գործակից:
Հզորության ուժեղարարներում կիրառվում են անմիջական և տրանսֆորմատորային կապերը: Անմիջական կապի դեպքում բեռը միացվում է ուժեղարարի ելքում, իսկ մյուս տարբերակում` կապն իրականացվում է տրանսֆորմատորի միջոցով:
4.2.1. ՏՐԱՆՍՖՈՐՄԱՏՈՐՈՅԻՆ ԿԱՊՈՎ ՄԻԱՏԱԿՏ ՀԶՈՐՈՒԹՅԱՆ ՈՒԺԵՂԱՐԱՐ
Տրանսֆորմատորային կապով միատակտ հզորության ուժեղարարում տրանզիստորը միացված է ընդհանուր էմիտերով, և այն աշխատում է A դասում (նկ. 4.2): Տրանզիստորի կոլեկտորը տրանսֆորմատորի առաջնային փաթույթի միջոցով անմիջապես միացված է սնման աղբյուրին, իսկ բեռը` տրանսֆորմատորի երկրորդային փաթույթին: Այդ սխեմայում գործող Cբ, Cկ, Cէ, Rէ, R1 և R2 տարրերի նշանակությունը նույն է ինչ նկ. 4.1 -ում բերված սխեմայում:
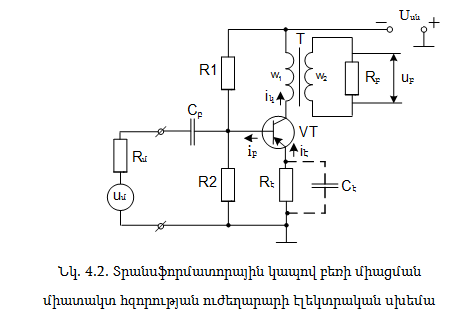
Հզորության ուժեղարարում Rէ դիմադրության մեծությունը պետք է լինի հնարավորինս փոքր` նվազեցնելու հզորության կորուստը: Rէ դիմադրության փոքր արժեքի դեպքում խնդիր է առաջանում Cէ կոնդենսատորի կիրառման տեսակետից, քանի որ այն պետք է լինի բավականին մեծ: Այդ պատճառով երբեմն Rէ դիմադրությունը հանվում է սխեմայից, իսկ կիրառման դեպքում սխեմայից հանվում է շունտող Cէ կոնդենսատորը:
ՈՒժեղացվող սինուսոիդալ ազդանշանի դեպքում ուժեղարարի կոլեկտորի վրայի հզորությունը
![]()
բեռում օգտակար հզորությունը
![]()
իսկ ուժեղարարի ՕԳԳ -ն`
![]()
որտեղ
![]() համապատասխանաբար
կոլեկտորային
փոփոխական
լարման
և
հոսանքի
ամպլիտուդային
արժեքներն
են,
համապատասխանաբար
կոլեկտորային
փոփոխական
լարման
և
հոսանքի
ամպլիտուդային
արժեքներն
են,
![]() տրանսֆորմատորի
ՕԳԳ
-ն, իսկ
Pսն
-ն`
սնման
աղբյուրից
սպառած
հզորությունը:
տրանսֆորմատորի
ՕԳԳ
-ն, իսկ
Pսն
-ն`
սնման
աղբյուրից
սպառած
հզորությունը:
Տրանսֆորմատորային կապով ուժեղարարն ապահովում է բեռին առավելագույն հզորության փոխանցում, հեշտությամբ է իրականացվում ուժեղարարի ելքային և բեռի դիմադրությունների համաձայնեցումը, սակայն մեծանում են ուժեղարարի եզրային չափսերը, կշիռը և ոչ գծային ու հաճախական աղավաղումները:
4.2.2. ԵՐԿՏԱԿՏ ՀԶՈՐՈՒԹՅԱՆ ՈՒԺԵՂԱՐԱՐՆԵՐ
Այս կառուցվածքով հզորության ուժեղարարները լինում են տրանսֆորմատորային կապով, առանց տրանսֆորմատորի, երկու սնման աղբյուրով, տարբեր կառուցվածքի տրանզիստորներով և այլն: Բերված երկտակտ հզորության ուժեղարարների էլեկտրական սխեմաներն առանց տրանսֆորմատորի են, իսկ տրանզիստորներն աշխատում են AB դասի ռեժիմում:
Նկար 4.3 -ում բերված է երկտակտ հզորության ուժեղարարի էլեկտրական սխեման՝ առանց տրանսֆորմատորի, երկու սնման աղբյուրով (Uսն1, Uսն2) և տարատեսակ կիսահաղորդչային կառուցվածքի տրանզիստորներով:
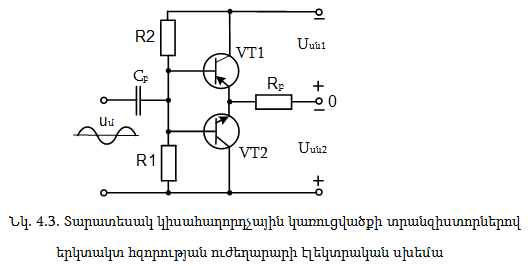
Էլեկտրական սխեմայի ելքային մասը բաղկացած է երկու միատակտանի ուժեղարարից` հիմնված VT1 և VT2 տրանզիստորների վրա: Սնման լարման աղբյուրները նույն մեծության են՝ Uսն1=Uսն2 և միացված են հաջորդաբար` ձևավորելով 0 զրոյական կետ, որին և տրանզիստորների կոլեկտորների միացման ընդհանուր կետին միացված է Rբ բեռը: Մուտքային փոփոխական ազդանշանի բացասական կիսապարբերության ընթացքում բաց է VT1 տրանզիստորը, իսկ VT2 -ը` փակ, և Rբ բեռը միանում է Uսն1 աղբյուրին, իսկ դրական կիսապարբերության ընթացքում` հակառակը` բաց է VT2 -ը, իսկ VT1 -ը` փակ, և Rբ բեռը միանում է Uսն2 աղբյուրին: Այդպիսով, մուտքային ազդանշանի յուրաքանչյուր կիսապարբերություն ուժեղացվում է հաջորդաբար աշխատող տրանզիստորների միջոցով, և ամբողջական մուտքային ազդանշանը ուժեղացվելով տրվում է Rբ բեռին:
Նույն կիսահաղորդչային կառուցվածքի տրանզիստորների կիրառմամբ հզորության ուժեղարարի սխեման բերված է նկ. 4.4–ում: R1, R2 և R3, R4 բաժանիչ դիմադրություններով սահմանվում է համապատասխան տրանզիստորի աշխատանքային կետի դիրքը հանգստի ռեժիմում, իսկ մնացած տարրերի նշանակությունը նույնն է ինչ նախորդներում: Մինչ uմ1 և uմ2 մուտքային միմյանցից 180°-ով շեղված` հակափուլային երկու հավասար ամպլիտուդով փոփոխական լարումների հայտնվելը երկու տրանզիստորները փակ են:
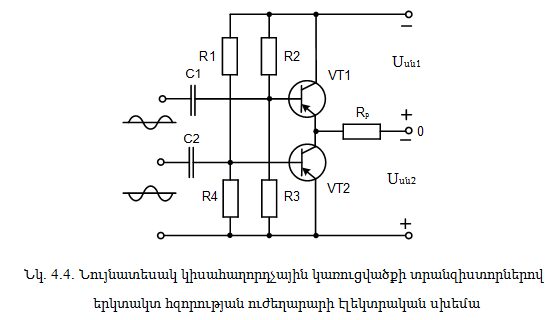
Տրանզիստորները, որոնք բացվում են մուտքային փոփոխական ազդանշանի դրական կիսապարբերության ընթացքում, աշխատում են հաջորդաբար:
Երկտակտ հզորության ուժեղարարի ևս մի տարբերակ բերված է նկ. 4.5–ում, որտեղ կիրառվում է մեկ սնման աղբյուր, բայց բեռին հաջորդաբար միացվում է մեծ ունակությամբ բաժանիչ Cելք կոնդենսատոր, որը տրանզիստորների նույնանման պարամետրերի դեպքում լիցքավորվում է մինչև 0,5Uսն արժեքը և VT2 տրանզիստորի բացման դեպքում բեռի համար ծառայում է որպես սնման աղբյուր:
Բերված սխեմաներից 4.4 և 4.5–ում VT1 տրանզիստորը միացված է ընդհանուր կոլեկտորով, իսկ VT2-ը՝ ընդհանուր էմիտերով, ուստի ըստ լարման, ուժեղացման գործակիցները կլինեն տարբեր, հետևաբար պետք է ձեռնարկվեն միջոցառումներ մուտքային լարման կիսապարբերությունների ուժեղացման գործակիցների հավասարեցման համար: Այդ խնդիրը պետք է լուծել հզորության ուժեղարարների մուտքային փուլաշրջող սխեմայում՝ ապահովելով անհրաժեշտ ուժեղացման գործակիցներ ըստ նշանափոխ լարման կիսապարբերությունների: Նկար 4.3-ում բերված էլեկտրական սխեմայում նշված խնդիրը բացակայում է, քանի որ երկու տրանզիստորներ աշխատում են նույն ռեժիմում, որովհետև միացված են ընդհանուր կոլեկտորով:

Ներկայացված սխեմաներում պետք է կիրառել տրանզիստորներ, որոնց պարամետրերը, հատկապես ըստ հոսանքի ուժեղացման գործակիցը, նույնն են:
5. ԷԼԵԿՏՐՈՆԱՅԻՆ ՌԵԼԵՆԵՐ
5.1. ԷԼԵԿՏՐՈՆԱՅԻՆ ՌԵԼԵՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
Էլեկտրոնային ռելեներից ավելի շատ օգտագործվում են կիսահաղորդչայինները, որոնք հաճախ կոչվում են անհպակ կիսահաղորդչային ռելեներ: Այս սարքերի հիմքը տրանզիստորների վրա կառուցված երկկասկադ ուժեղարարն է, որտեղ կիրառվելով դրական հետադարձ կապ, իրականացվում է ելքային Y ազդանշանի թռիչքային փոփոխություն մուտքային X ազդանշանի սահուն փոփոխման դեպքում, և արդյունքում մուտք-ելք բնութագիրն ունենում է ռելեական բնույթ: Ստեղծվում են առաջնային ռելեներ, ժամանակի ռելեներ, ջերմային ռելեներ, ելքային ռելեներ, լարման ռելեներ, հոսանքի ռելեներ, ֆոտո ռելեներ և այլ տեսակի ռելեներ:
Էլեկտրոնային ռելեի բազային տարր հանդիսացող տրանզիստորը կարող է լինել ինչպես p-n-p, այնպես էլ n-p-n կիսահաղորդչային հաղորդականությամբ: Այդ սարքերում տրանզիստորներն աշխատում են հիմնականում բանալիային ռեժիմում և կարող են կատարել էլեկտրական շղթայի փոխանջատումներ բարձր արագությամբ ու հաճախությամբ: Ընդ որում, փոխանջատումների բարձր հաճախությունը գործնականորեն բացասաբար չի ազդում ռելեական սարքավորման ծառայության ժամկետի ու հուսալիության վրա, ինչը հիմնական առավելություններից մեկն է` հպակային ռելեական սարքավորման համեմատ:
Մուտքային X ազդանշանի (լարում, հոսանք, ջերմաստիճան, լույսի հոսք և այլն) արժեքը 0-ից մինչև Xբան բանեցում փոփոխվելու դեպքում ելքային Y մեծությունը (լարում, հոսանք, հզորություն և այլն) հավասար է լինում նվազագույն Yնվ արժեքին: Ելքային պարամետրի նվազագույն Yնվ արժեքը պայմանավորված է ելքային կիսահաղորդչային տարրի փակ ռեժիմում մնացորդային ջերմային հոսանքով:
Երբ մուտքային մեծությունը հավասարվում է ռելեի բանեցման Xբան մեծությանը, ելքային մեծությունը փոխվում է թռիչքաձև` հասնելով իր առավելագույն Yառ արժեքին, որից հետո X-ի հետագա մեծացման դեպքում Y-ի արժեքը մնում է անփոփոխ՝ Yառ (նկ. 5.1):
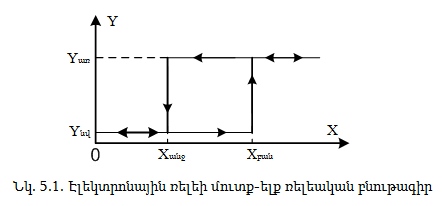
Մուտքային X մեծության նվազման դեպքում ելքային Y մեծությունը փոփոխության չի ենթարկվում: Երբ մուտքային մեծությունը հավասարվում է ռելեի անջատման Xանջ մեծությանը, ելքային մեծությունը փոքրանում է թռիչքաձև` հասնելով իր նվազագույն Yնվ արժեքին, որից հետո X -ի հետագա փոքրացման դեպքում Y -ի արժեքը մնում է անփոփոխ՝ Yնվ:
Ռելեական բնութագրի ձևավորման ուղղությունը նկ. 5.1-ում ցույց է տրված սլաքներով:
Քանի որ տրանզիստորի միացման ընդհանուր էմիտերով սխեման օժտված է հզորության առավել ուժեղացմամբ, ուստի հիմնականում այդպիսի միացումն է կիրառվում էլեկտրոնային ռելեներում
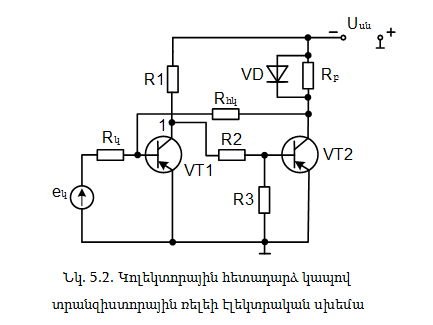
5.2. ԿՈԼԵԿՏՈՐԱՅԻՆ ՀԵՏԱԴԱՐՁ ԿԱՊՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
Նկ. 5.2 -ում բերված է էլեկտրոնային ռելեի էլեկտրական սխեման, որտեղ տրանզիստորները միացված են ընդհանուր էմիտերով, և դրական հետադարձ կապն ըստ լարման է` կոլեկտորային: Հետադարձ կապն իրականացվում է Rհ.կ հետադարձ կապի դիմադրության միջոցով` միացվելով VT2 տրանզիստորի կոլեկտորի և ուժեղարարի մուտքի` VT1 տրանզիստորի բազայի միջև` զուգահեռ մուտքային կառավարման eկ ազդանշանին: Ռելեի ելքային պարամետր է VT2 տրանզիստորի կոլեկտորով անցնող բեռի հոսանքը: Ռելեն սնվում է հաստատուն Uսն լարման աղբյուրից:
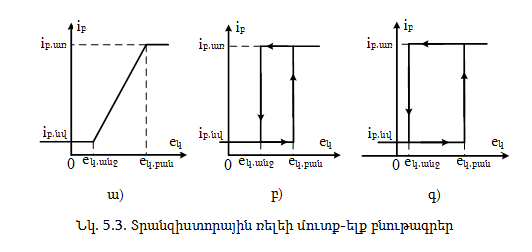
Հետադարձ կապի Rհկ դիմադրության բացակայության դեպքում սխեման երկաստիճան ուժեղարար է, և մուտք-ելք բնութագիրը ռելեական չէ (նկ. 5.3ա):
Կառավարման
eկ
ազդանշանի
նվազման
դեպքում
աճում
է
բազային
հոսանքը,
և
որոշակի
արժեքի
դեպքում
VT1
տրանզիստորը
մտնում
է
հագեցած
ռեժիմ
(շատ փոքր
ներքին
դիմադրություն):
Կոլեկտորի
1 կետի պոտենցիալն
աճում
է,
և
էմիտեր-կոլեկտոր
uէկ լարումը
ձգտում
է
զրոյի`![]() 1 կետի
պոտենցիալի
աճը
հանգեցնում
է
VT2
տրանզիստորի
բազային
պոտենցիալի
մեծացմանը,
ինչի
հետևանքով
VT2
-ը անցնում
է
անջատված`
փակ
ռեժիմ
(շատ մեծ
ներքին
դիմադրություն),
կոլեկտորի
վրա
պոտենցիալը
նվազում
է,
և
արդյունքում
Rբ
բեռի
վրայի
լարումը
ձգտում
է
զրոյի`
1 կետի
պոտենցիալի
աճը
հանգեցնում
է
VT2
տրանզիստորի
բազային
պոտենցիալի
մեծացմանը,
ինչի
հետևանքով
VT2
-ը անցնում
է
անջատված`
փակ
ռեժիմ
(շատ մեծ
ներքին
դիմադրություն),
կոլեկտորի
վրա
պոտենցիալը
նվազում
է,
և
արդյունքում
Rբ
բեռի
վրայի
լարումը
ձգտում
է
զրոյի`
![]() Բեռով
անցնող
հոսանքը
նվազագույն
է`
Բեռով
անցնող
հոսանքը
նվազագույն
է`![]() որի
մնացորդային
մասը
պայմանավորված
է
անջատված
տրանզիստորի
մնացորդային
ջերմային
հոսանքով:
Կառավարման
eկ
ազդանշանի
հետագա
նվազումը
չի
առաջացնում
տրանզիստորների
վիճակի
փոփոխություն:
որի
մնացորդային
մասը
պայմանավորված
է
անջատված
տրանզիստորի
մնացորդային
ջերմային
հոսանքով:
Կառավարման
eկ
ազդանշանի
հետագա
նվազումը
չի
առաջացնում
տրանզիստորների
վիճակի
փոփոխություն:
Կառավարման
eկ
ազդանշանի
դրական
աճը
հանգեցնում
է
VT1
տրանզիստորի
uբէ
բազա-էմիտեր
լարման
նվազմանը,
հետևաբար
նաև`
բազային
հոսանքի
փոքրացմանը,
որի
հետևանքով
VT1
տրանզիստորը
սկսում
է
փակվել:
Կառավարման
eկ
ազդանշանի
որոշակի
արժեքի
դեպքում
VT1
տրանզիստորը
մտնում
է
անջատված
ռեժիմ,
որի
հետևանքով
փոքրանում
է
կոլեկտորային
հոսանքը,
1 կետի պոտենցիալը
նվազում
է,
այսինքն
մեծանում
է
էմիտեր-կոլեկտոր
uէկ
լարումը:
Դրա
հետևանքով
փոքրանում
է
VT2
տրանզիստորի
բազայի
պոտենցիալը,
ինչը
հանգեցնում
է
բազային
հոսանքի
աճին,
և
վերջինն
անցնում
է
հագեցած
ռեժիմ,
ինչը
բնորոշվում
է
կոլեկտորի
պոտենցիալի
աճով,
արդյունքում`
Rբեռ
բեռի
վրայի
լարումը
ձգտում
է
սնման
լարման
արժեքին`
![]()
Այդպիսի սխեմային տարբերակով տրանզիստորների փոխանջատումը սահուն կատարվում է որոշակի ժամանակահատվածում:
Հետադարձ կապի Rհկ դիմադրության առկայության դեպքում փոխվում է սարքի մուտք-ելք բնութագիրը, և այն դառնում է ռելեական (նկ. 5.3բ), քանի որ այդ դիմադրության միջոցով ելքային տրանզիստորի կոլեկտորային պոտենցիալը տրվում է մուտքային տրանզիստորի բազային: Այդպիսի հետադարձ կապը կոչվում է նաև ըստ լարման, և այն դրական է, քանի որ մուտքային տրանզիստորի բազայի պոտենցիալի փոփոխման բնույթը համընկնում է ելքային տրանզիստորի կոլեկտորային պոտենցիալի փոփոխման հետ, այսինքն` մուտքային լարման նվազմանը գումարվում է ելքային լարման նվազումը և հակառակը` մուտքային լարման աճին գումարվում է ելքային լարման աճը, և այդպիսով ավելի են մեծացվում մուտքային տրանզիստորի բազայի պոտենցիալի նվազման և աճի արագությունները, ինչն ավելի է արագացնում տրանզիստորների փոխանջատումը:
Տրանզիստորների վիճակի փոփոխությունը կատարվում է ակնթարթորեն:
Այդպիսով, դրական հետադարձ կապի ազդեցությամբ ապահովվում է ռելեի մուտքի և ելքի պարամետրերի ռելեական կապը, իսկ մուտք-ելք բնութագիրն ունենում է ռելեական բնույթ, այսինքն` մուտքային կառավարման լարման որոշակի արժեքի դեպքում ելքային հոսանքի արժեքը փոխվում է թռիչքաձև:
Բեռի ակտիվ-ինդուկտիվ բնույթի դեպքում ելքային VT2 տրանզիստորի պաշտպանությունը գերլարումից կատարում է բեռին զուգահեռ միացված VD դիոդը: VT2 տրանզիստորի փակվելիս գերլարման առաջացումը բացում է դիոդը և բեռի հոսանքը նվազում է փակվելով VD-Rբ շղթայով` դրանով ուշացնելով բեռի հոսանքազրկումը, ինչի պատճառով մեծանում է բեռի անջատման ժամանակը:
Rհ.կ -ի մեծ արժեքի դեպքում, այսինքն` թույլ հետադարձ կապի դեպքում, մուտք-ելք բնութագիրն ունենում է նեղ օղակ (նկ. 5.3բ), իսկ Rհ.կ -ի փոքր արժեքի դեպքում հետադարձ կապը խորանում է, և ռելեական բնութագիրը` լայնանում (նկ. 5.3գ):
5.3. ԷՄԻՏԵՐԱՅԻՆ ՀԵՏԱԴԱՐՁ ԿԱՊՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
Ռելեի
էլեկտրական
սխեման
պատկերված
է
նկ.
5.4 -ում, որտեղ
դրական
հետադարձ
կապն
ըստ
էմիտերային
հոսանքի
է:
Բեռի
Iբեռ հոսանքը,
անցնելով
հետադարձ
կապի
Rհ.է
դիմադրությամբ,
ստեղծում
է
նրանում
![]() լարման
անկում,
որը
գործում
է
ուժեղարարի
մուտքում
eկ կառավարման
ազդանշանի
հետ
համատեղ,
այսինքն`
ուժեղարարի
մուտք
տրվում
է
ազդանշան,
որի
մեծությունը
համարժեք
է
բեռի
հոսանքին:
Քանի
որ
դրական
հետադարձ
կապի
դիմադրությունն
ընդգրկված
է
VT1 և VT2 տրանզիստորների
էմիտերների
շղթայում,
ուստի
uհկ լարումը
դառնում
է
հաջորդական
միացված
մուտքային
կառավարման
ազդանշանի
հետ:
Այդպիսի
դրական
հետադարձ
կապով
ռելեական
սխեման
կոչվում
է
էմիտերային
կամ
հաջորդական:
լարման
անկում,
որը
գործում
է
ուժեղարարի
մուտքում
eկ կառավարման
ազդանշանի
հետ
համատեղ,
այսինքն`
ուժեղարարի
մուտք
տրվում
է
ազդանշան,
որի
մեծությունը
համարժեք
է
բեռի
հոսանքին:
Քանի
որ
դրական
հետադարձ
կապի
դիմադրությունն
ընդգրկված
է
VT1 և VT2 տրանզիստորների
էմիտերների
շղթայում,
ուստի
uհկ լարումը
դառնում
է
հաջորդական
միացված
մուտքային
կառավարման
ազդանշանի
հետ:
Այդպիսի
դրական
հետադարձ
կապով
ռելեական
սխեման
կոչվում
է
էմիտերային
կամ
հաջորդական:
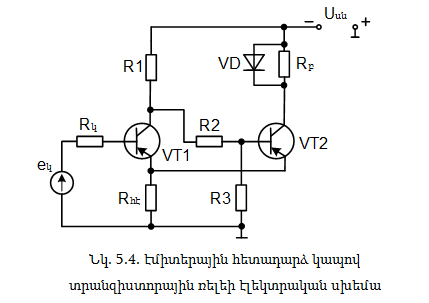
Սխեմայում հետադարձ կապը դրական է, քանի որ մուտքային կառավարման eկ ազդանշանի դրական աճի դեպքում VT1 տրանզիստորը սկսում է փակվել, իսկ VT2 -ը` բացվել, և բեռի Iբեռ հոսանքն աճում է, հետևաբար աճում է նաև հետադարձ կապի լարումը: Մուտքային կառավարման eկ ազդանշանի նվազման դեպքում VT1 տրանզիստորը սկսում է բացվել, իսկ VT2 -ը` փակվել, և բեռի Iբեռ հոսանքը նվազում է, այսինքն` հետադարձ կապի լարման փոփոխության բնույթը համընկնում է կառավարման ազդանշանի փոփոխության բնույթին, որի հետևանքով գումարվելով կառավարման ազդանշանին` ուժեղացնում է նրա փոփոխության արագությունը:
Հետադարձ կապի դիմադրության մեծությունը փոխում է ռելեի մուտք-ելք բնութագիրը: Հետադարձ կապի դիմադրության միջով անցնում են VT1 և VT2 տրանզիստորների էմիտերային հոսանքները: Ինչքան մեծ է հետադարձ կապի Rհ.կ դիմադրությունը, այնքան խորն է հետադարձ կապը, և որոշակի կրիտիկական արժեքից մեծ լինելու դեպքում բնութագիրը դառնում է ռելեական:
Ռելեական սխեմայում հետադարձ կապի տեսակի ընտրությունը կատարվում է համապատասխան հետևյալ պայմանի. եթե Rկ>Rբ, ապա ռելեական սխեմայում հետադարձ կապը պետք է ընտրել կոլեկտորային, իսկ եթե Rկ<Rբ` ապա էմիտերային:
Կառավարման շղթայի Rկ դիմադրությունը որոշվում է հետևյալ կերպ.
![]()
որտեղ eկ.փոխ -ը և Pկ.փոխ -ը փոխանջատում ապահովող կառավարման ազդանշանի համապատասխանաբար լարման և հզորության արժեքներն են:
Եթե ռելեն կոլեկտորային հետադարձ կապով է, անջատման լարման արժեքը որոշվում է հետևյալ կերպ.
![]()
որտեղ Uէբ1փ -ն` մուտքային տրանզիստորի էմիտեր-բազա լարման արժեքն է փակման սահմանում, իսկ Iկ1(2հ) -ը` VT1 տրանզիստորի կոլեկտորային հոսանքը փակման դեպքում, երբ ելքային VT2 տրանզիստորը հագեցման սահմանում է: Վերջինը հաշվարկվում է հետևյալ կերպ.
![]()
Կոլեկտորային հետադարձ կապի Rհկ դիմադրության արժեքը որոշվում է հետևյալ կերպ.
![]()
իսկ Էմիտերային հետադարձ կապի դիմադրության արժեքը`
![]()
Վերջին
արտահայտություններում
eկ.բան
-ը և
eկ.անջ
-ը համապատասխանաբար
կառավարման
լարման
բանեցման
և
անջատման
արժեքներն
են,
Iկ1(2փ)
-ը և
Iկ1(2հ)
-ը VT1 -ի
կոլեկտորային
հոսանքներն
են,
երբ
VT2 -ը գտնվում
է
համապատասխանաբար
փակ
և
հագեցած
ռեժիմներում,![]() VT1 -ի
ուժեղացման
գործակիցն
է`
ըստ
բազային
հոսանքի:
VT1 -ի
ուժեղացման
գործակիցն
է`
ըստ
բազային
հոսանքի:
Բանեցման լարումը որոշվում է հետևյալ հավասարման միջոցով`
![]()
Էմիտերային
հետադարձ
կապով
ռելեի
համար,
ընդունելով
![]() բանեցման
կառավարման
լարումը`
բանեցման
կառավարման
լարումը`
![]()
որտեղ
![]()
Ռելեի անջատման լարումը որոշվում է այսպես`
![]()
5.4. ՀԱՄԱԿՑՎԱԾ ՀԵՏԱԴԱՐՁ ԿԱՊԵՐՈՎ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ՌԵԼԵ
Ռելեական սխեմայում կիրառելի են միաժամանակ ըստ լարման կոլեկտորային և ըստ հոսանքի էմիտերային հետադարձ կապերը: Այդ դեպքում ռելեն կոչվում է համակցված հետադարձ կապերով (նկ. 5.5):
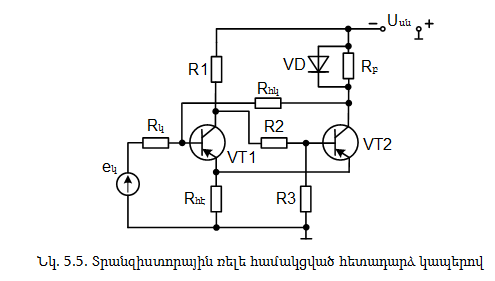
Երբ ելքային տրանզիստորը գտնվում է անջատման ռեժիմում, էմիտերային հոսանքը մոտ է զրոյի, և էմիտերային հետադարձ կապի լարումը մոտավորապես հավասար է զրոյի, այսինքն` էմիտերային հետադարձ կապը գործնականում չի գործում: Երբ տրանզիստորը գտնվում է հագեցման ռեժիմում, կոլեկտորային հետադարձ Rհ.կ դիմադրության վրա լարման անկումը մոտավորապես հավասար է զրոյի, քանի որ կոլեկտորային հետադարձ կապի հոսանքը հավասար է զրոյի, այսինքն` կոլեկտորային հետադարձ կապը գործնականորեն չի գործում:
Համակցված հետադարձ կապերով ռելեի բանեցման լարումը համընկնում է կոլեկտորային հետադարձ կապով ռելեի բանեցման լարման հետ, իսկ անջատման լարումը` էմիտերային հետադարձ կապով ռելեի անջատման լարման հետ: Ռելեի բանեցման և անջատման լարումների արժեքները կարող են կարգավորվել Rհ.կ և Rհ.է դիմադրություններով:
Համակցված հետադարձ կապերով ռելեի առավելություններից է համաձայնեցված աշխատանքը կառավարման ցանկացած աղբյուրի հետ, լինի այն հոսանքի աղբյուր կամ լարման աղբյուր, քանի որ կառավարման աղբյուրի ներքին Rկ դիմադրության ցանկացած ծայրահեղ արժեքի դեպքում կգործի հետադարձ կապերից որևէ մեկը: Այսպես, եթե ռելեն կառավարվում է հոսանքի աղբյուրից, այսինքն Rկ-ն ձգտում է զրոյի, ապա կգործի էմիտերային հետադարձ կապը, իսկ եթե ռելեն կառավարվի լարման աղբյուրից, այսինքն Rկ -ն ձգտում է անվերջության, ապա կգործի կոլեկտորային հետադարձ կապը:
Տրանզիստորային ռելեի ռելեական բնութագիրը (նկ. 5.6ա) կարելի է շեղել eշ չափով հորիզոնական առանցքով աջ (դրական շեղում) (նկ. 5.6բ) կամ ձախ (բացասական շեղում) (նկ. 5,6գ): Դրական շեղման համար անհրաժեշտ է մուտքային տրանզիստորի բազային նախօրոք` մինչ կառավարման ազդանշանի տալը, ապահովել բացասական պոտենցիալ, իսկ բացասական շեղման համար` դրական պոտենցիալ: Մուտքային տրանզիստորի բազային բացասական պոտենցիալ կարելի է ապահովել` միացնելով շեղման դիմադրությունը սնման լարման բացասական բևեռի և տրանզիստորի բազայի միջև, իսկ դրական պոտենցիալ կարելի է ապահովել` միացնելով շեղման դիմադրությունը սնման լարման դրական բևեռի և տրանզիստորի բազայի միջև:
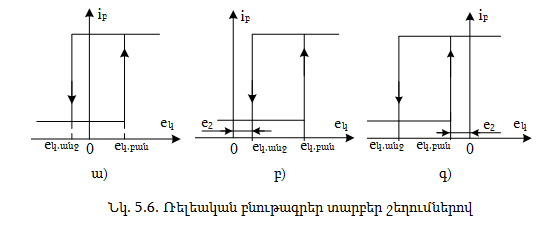
Տրանզիստորային ռելեի հիմնական բնութագրիչ ստատիկ պարամետրերն են.
- բեռի հոսանքը ռելեի բանեցված Iբ.բան և անջատված Iբ.անջ ռեժիմներում,
- ռելեի պատիկության գործակիցն ըստ հոսանքի`
![]()
- հզորության կորուստը ռելեում բանեցված Pկ.բան և անջատված Pկ.անջ ռեժիմներում,
- ռելեի ՕԳԳ -ն`
![]()
որտեղ Pբ -ն բեռի հզորությունն է,
- հետադարձի գործակիցը`
![]()
- ռելեի ուժեղացման գործակիցն ըստ հզորության
![]()
որտեղ Pկ.փոխ -ը կառավարման փոխանջատման հզորությունն է:
Ռելեի հիմնական բնութագիրը մուտք-ելք Iբեռ = f(eկ) ռելեական բնութագիրն է:
5.5. ԺԱՄԱՆԱԿԻ ՌԵԼԵՆԵՐ
Կառավարման և պաշտպանության համակարգերում էլեկտրական սարքավորումների կոմուտացման ժամանակների միջև շեղում ստեղծելու նպատակով կիրառվում են ժամանակի ռելեներ: Այդ ռելեների միջոցով ապահովվում է կարգավորվող tհ ժամանակի հապաղում հրամանի տրման պահի և կատարման գործողության, մասնավորապես` բեռի շղթայի tհ.բ բանեցման, կամ tհ.ա անջատման պահերի միջև (նկ. 5.7):
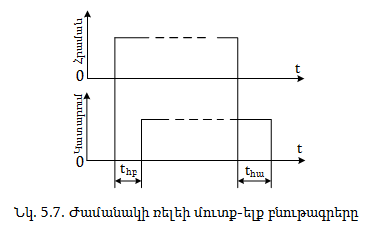
Ժամանակի ռելեներն ըստ կառուցվածքի լինում են էլեկտրամագնիսական, էլեկտրաշարժիչային, ժամացույցի մեխանիզմով և էլեկտրոնային ու կարողանում են ապահովել ժամանակի պահում միկրովայրկյաններից մինչև տասնյակ ժամեր:
5.5.1. RC ՇՂԹԱՅՈՎ ԷԼԵԿՏՐՈՆԱՅԻՆ ԺԱՄԱՆԱԿԻ ՌԵԼԵ
Էլեկտրոնային ժամանակի ռելեներն ըստ կառուցվածքի բազմազան են: Ամենապարզ միջոցը, որոշակի ժամանակի հապաղում ստանալու համար, ապահովվում է RC շղթաների կիրառումը, որտեղ օգտագործվում են կոնդենսատորի լիցքավորման և լիցքաթափման գործընթացները: Դրանք ունեն փոքր չափսեր ու ինքնարժեք, պարզ կառուցվածք, ինչի համար էլ ունեն լայն կիրառություն` չնայած այն բանին, որ ժամանակի հապաղումն իրականացվում է մեծ շեղումներով:
Նկ. 5.8 -ում բերված է RC շղթայի կիրառմամբ ժամանակի ռելեի պարզ կառուցվածքը, որտեղ օգտագործվում են C կոնդենսատորի լիցքավորման և լիցքաթափման ժամանակները: Ռելեն միացնելիս ժամանակի tհ.մ հապաղման մեծությունը պայմանավորված է C կոնդենսատորի և R1 դիմադրության մեծություններով:
Սկզբնական վիճակում C կոնդենսատորը լիցքաթափված է, և VT տրանզիստորը փակ է, քանի որ մուտքում լարման մակարդակը ցածր է:
SA բանալին փակվելիս, տրվում է բեռի միացման հրամանը, C կոնդենսատորը սկսում է լիցքավորվել R1 դիմադրության միջոցով, որին զուգահեռ սկսվում է VT -ի սահուն բացվելը: Կոնդենսատորի լիզքավորմամբ մեծանում է պոտենցիալը VT -ի բազայի վրա, որին հետևում է տրանզիստորի սահուն բացվելը, աճում է կոլեկտորային հոսանքը, աճում նաև Zբ բեռի հոսանքը: Տրանզիստորի ամբողջական բացման դեպքում բեռի հոսանքը հասնում է առավելագույն արժեքին:
Կոնդենսատորի լիցքավորման լարման կորի հավասարումն ունի հետևյալ տեսքը.
![]()
որտեղ Um-ն կոնդենսատորի վրայի լարման ամպլիտուդի արժեքն է:
t հապաղման ժամանակից հետո լարումը կոնդենսատորի վրա հասնում է VT տրանզիստորի ամբողջական բացման uC≈Uբ արժեքին, և այն բացվում է: Ռելեի tհ.բ հապաղման ժամանակն այն բանեցնելիս որոշվում է հետևյալ կերպ.
![]()
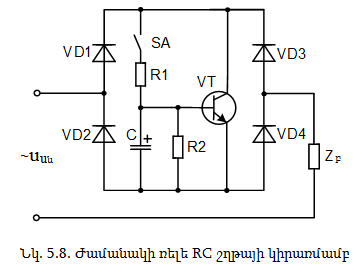
Տրանզիստորի բացված վիճակում հոսանքը բեռով որոշվում է.
![]()
Սնման նշանափոխ լարման մի կիսապարբերությունում բեռի հոսանքն անցնում է VD1-VT-VD4-Zբ շղթայով, իսկ հաջորդ կիսապարբերության դեպքում՝ Zբ-VD3-VT-VD2 շղթայով:
SA բանալու բացման դեպքում տրվում է բեռի անջատման հրամանը: C կոնդենսատորը սկսում է լիցքաթափվել հիմնականում R2 –ի միջոցով, որի հետևանքով VT տրանզիստորի բազայի պոտենցիալը սկսում է նվազել, տրանզիստորը սկսում է փակվել, նվազում է նաև բեռի հոսանքը և տրանզիստորի փակվելով բեռը հոսանքազրկվում է: Արդյունքում բեռն անջատվում է սնման աղբյուրից:
Լիցքաթափման դեպքում լարումը կոնդենսատորի վրա ըստ ժամանակի արտահայտվում է հետևյալ կերպ.
![]()
Պահման
t ժամանակից
հետո լարումը
կոնդենսատորի
վրա հասնում
է ![]() արժեքին,
VT
տրանզիստորը
փակվում
է: VT տրանզիստորի
ամբողջական
փակման`
բեռի անջատման
tհ.ա
հապաղման
ժամանակը
որոշվում
է հետևյալ
կերպ.
արժեքին,
VT
տրանզիստորը
փակվում
է: VT տրանզիստորի
ամբողջական
փակման`
բեռի անջատման
tհ.ա
հապաղման
ժամանակը
որոշվում
է հետևյալ
կերպ.
![]()
Այդպիսով, ժամանակի ռելեի միացման հապաղման ժամանակը պայմանավորված է R1 -ի և C -ի արժեքներով, իսկ անջատման ժամանակի հապաղման մեծությունը` R2 -ի և C -ի արժեքներով:
Հաստատուն R1 և R2 դիմադրությունները փոխարինելով փոփոխականներով, կամ փոխանջատիչի միջոցով շղթա մտցնելով կոնդենսատորներ կամ դիմադրություններ, կարելի է ապահովել ժամանակի ռելեի հապաղման ժամանակների մեծ միջակայք` սահուն կամ ընդհատուն փոփոխման հնարավորությամբ (նկ. 5.9):
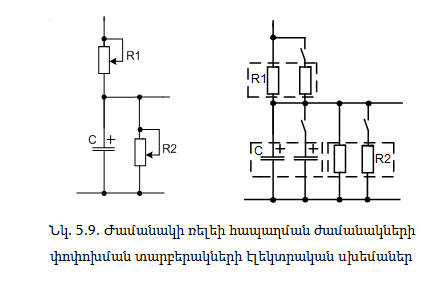
Շղթայի մաս կազմող VD1...VD4 դիոդներով ուղղիչը նախատեսված է փոփոխական լարման ուղղման համար: Եթե բեռը պետք է սնվի հաստատուն լարումից, ապա այն միացվում է տրանզիստորի կոլեկտորին:
5.5.2. ԹՎԱՅԻՆ ՏԱՐՐԵՐՈՎ ԺԱՄԱՆԱԿԻ ՌԵԼԵ
Ժամանակի հապաղման մեծ ճշտություն և մեծ միջակայք կարողանում են ապահովել թվային տարրերի հիման վրա կառուցված ռելեները: Այդպիսի կառուցվածքով ժամանակի ռելեի էլեկտրական սխեմայի տարբերակ բերված է նկ. 5.10 -ում:
Սկզբնական վիճակում DD1 և DD2 10 -ական հաշվիչ-վերծանիչների ելքերում զրոյական վիճակ է, CP մուտքերի պոտենցիալը մոտավորապես զրո է` CP=0, քանի որ VD1 և VD2 դիոդները բաց են: G գեներատորից որոշակի հաճախությամբ ուղղանկյուն իմպուլսները տրվում են DD1 -ի CN մուտքին: Այդպիսի ռեժիմի դեպքում հաշվիչ-վերծանիչի կողմից իմպուլսների քանակի հաշվումը կատարվում է ազդանշանի ճակատից:
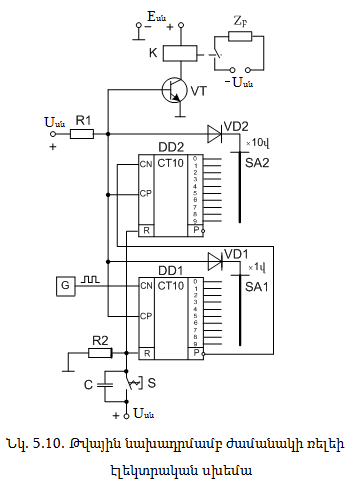
Մուտքային իմպուլսների քանակի հաշվումը կարելի է կատարել նաև CP մուտքից, եթե ապահովվի CN=1 պայմանը: Այդ դեպքում իմպուլսների քանակի հաշվումը կկատարվի ազդանշանի հատվածքից:
Առաջին DD1 հաշվիչի P ելքից 10 անգամ փոքրացված հաճախությամբ իմպուլսները տրվում են երկրորդ DD2 հաշվիչ-վերծանիչի CN մուտքին:
Հապաղման ժամանակը մեծացնելու համար պետք է հաջորդաբար ավելացնել հաշվիչ-վերծանիչների քանակը: Յուրաքանչյուր հաշվիչ-վերծանիչի ավելացմամբ փոխանցվող իմպուլսների հաճախությունը մուտքայինի նկատմամբ փոքրացվում է 10 անգամ:
Հաշվիչ-վերծանիչներից յուրաքանչյուրի 0...9 ելքերից որևէ մեկում, որը համապատասխանում է հաշվիչում գրանցված իմպուլսների քանակին, սահմանվում է 1 վիճակ, իսկ մյուսներում` 0 վիճակ: Հաշվիչ-վերծանիչների ելքերը միացված են SA1 և SA2 փոխանջատիչներին, որոնց բռնակի տեղաշարժմամբ ելքային հպակը միացվում է համապատասխան հաշվիչ-վերծանիչի թվային ելքին: Փոխանջատիչների միջոցով սահմանվում է անհրաժեշտ հապաղման ժամանակը:
Եթե գեներատորից ստացված իմպուլսների հաճախությունը լինի հավասար 1 Հց -ի, ապա առաջին հաշվիչ-վերծանիչի միջոցով ապահովվում է միավոր` 1, 2,…, 9 վայրկյանների հապաղում, իսկ երկրորդի միջոցով` տասնավոր` 10, 20,…, 90 վայրկյանների հապաղում: Արդյունքում ստացվում է, որ երկու հաշվիչ-վերծանիչների այդպիսի միացման շնորհիվ կարելի է ապահովել ժամանակի հապաղում նվազագույնը 1 վ, իսկ առավելագույնը` 99 վ: Ավելացնելով հաշվիչ-վերծանիչների քանակը` կմեծացվի ժամանակի հապաղման ժամանակը` յուրաքանչյուրի դեպքում այն կմեծանա 10 անգամ: Փոխելով գեներատորի հաճախությունը, անփոփոխ թողնելով սխեմայի կառուցվածքը, կփոխվի ժամանակի հապաղման չափը: Այսպես, եթե մեծացվի հաճախությունը, ապա հապաղման ժամանակը կփոքրանա, իսկ եթե փոքրացվի հաճախությունը, ապա հապաղման ժամանակը կմեծանա: Երբ լրանում է նախադրված հապաղման ժամանակը երկու փոխանջատիչների համապատասխան ելքերում՝ VD1 ու VD2 դիոդների կաթոդներին ձևավորվում է լարման բարձր` 1 մակարդակը, ինչի հետևանքով փակվում են այդ դիոդները, և սնման լարման դրական պոտենցիալը տրվում է DD1 և DD2 հաշվիչ-վերծանիչների CP մուտքերին և VT տրանզիստորի բազային, որն աշխատում է բանալիային ռեժիմով: Այն պահից, երբ CP=1 դադարում է իմպուլսների քանակի հաշվման գործընթացը և VT-ի բացմամբ էլեկտրամագնիսական ռելեի K փաթույթը միանում է Eսն սնման աղբյուրին, որի հպակի միջոցով Zբ բեռը միանում է Uսն սնման աղբյուրին:
Հաշվիչ-վերծանիչների R մուտքերը միացված են S կոճակին, որի սեղմամբ R մուտքերին տրվում է լարման բարձր արժեք և հաշվիչ-վերծանիչները բերվում են 0 -ական վիճակի:
Այդպիսով, S կոճակի սեղմամբ սահմանվում է ժամանակի ռելեի հապաղման ժամանակի սկիզբը, իսկ Zբ -ի միացմամբ լրանում է տրված հապաղման ժամանակը:
Թվային նախադրմամբ ժամանակի ռելեի աշխատանքի ժամանակային բնութագրերը 20 վ նախադրմամբ բերված են նկ. 5.11 -ում:
Ժամանակի ռելեի աշխատանքի ճշտությունը կարելի է մեծացնել, եթե գեներատորն իրականացվի կվարցային ռեզոնատորի հիման վրա:
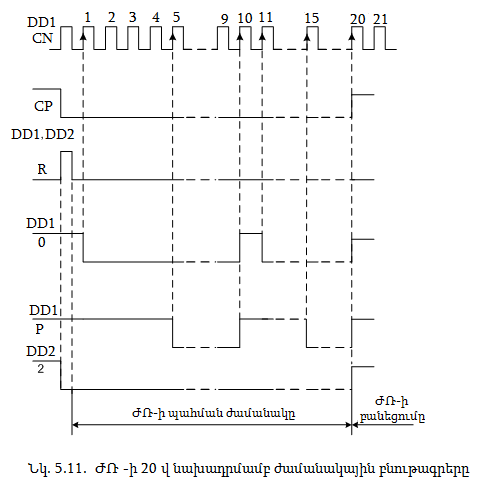
6. ԿԱՌԱՎԱՐՄԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԱՊԱՐԱՏՆԵՐ
Թիրիստորների կիրառմամբ իրականացվում են տարբեր էլեկտրոնային ապարատներ. հպարկիչներ, կառավարման կոճակներ, ապահովիչներ, ժամանակի ռելեներ, էներգիայի կերպափոխիչներ և այլն: Այդ տարրերը կարող են գտնվել հաղորդականության երկու խիստ տարբեր վիճակներում` ամբողջությամբ բաց կամ փակ: Երբ թիրիստորը բաց է, նրա էլեկտրական հաղորդականությունն առավելագույնն է (էլեկտրական դիմադրությունը նվազագույն), անցկացնում է հոսանք` անոդ-կաթոդ հատվածում լարման նվազագույն անկմամբ: Փակ վիճակում նրա էլեկտրական հաղորդականությունը նվազագույնն է (էլեկտրական դիմադրությունը առավելագույն) և անոդ-կաթոդ հատվածում հոսանք համարյա չի անցկացնում:
Թիրիստորային խմբի տարրերից հիմնականում կիրառվում են միագործողության տեսակին պատկանողները (չփակվող տրինիստոր), որոնց կառավարումն իրականացվում է կառավարման էլեկտրոդի շղթայի միջոցով` միայն բացելով այն: Այդ կիսահաղորդչային տարրերը յուրահատուկ են նրանով, որ կարող են անցկացնել մեծ հոսանք` ապահովելով փոքր լարման անկում: Դրանք հեշտությամբ բացվում են, երբ կառավարման էլեկտրոդին կաթոդի նկատմամբ տրվում է լարման դրական իմպուլս, որով ապահովվում է անհրաժեշտ մեծության հոսանք: Փոփոխական հոսանքի շղթաներում թիրիստորի փակվելը կատարվում է ինքնաբերաբար, երբ անոդ-կաթոդ լարումը փոխում է բևեռականությունը: Հաստատուն հոսանքի շղթաներում թիրիստորի փակվելն առաջացնում է լրացուցիչ խնդիր, որը վերացվում է հարկադրաբար` լրացուցիչ էլեկտրական շղթաների կիրառմամբ:
6.1. ՄԻԱԳՈՐԾՈՂՈՒԹՅԱՆ ԹԻՐԻՍՏՈՐՆԵՐԻ ՀԱՐԿԱԴՐԱԲԱՐ
ՓԱԿՄԱՆ ՏԱՐԲԵՐԱԿՆԵՐ
Դիտարկենք այն տարբերակները, որոնց կիրառմամբ հնարավոր է դառնում թիրիստորի հարկադրաբար փակումը (նկ. 6.1):
Եթե թիրիստորը փակման ժամանակ գտնվում է ուղիղ լարման տակ, անհրաժեշտ է նրա անոդային հոսանքը հարկադրաբար խզել կամ նվազեցնել` հասցնելով այն արժեքին, որը կբավականացնի նրա փակվելուն:
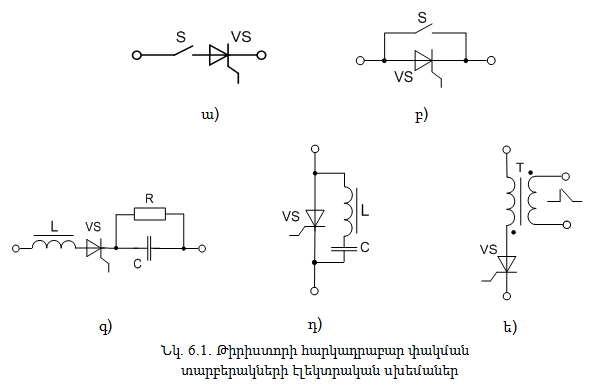
Անոդային շղթայի խզումը կարելի է իրականացնել մեխանիկական կամ էլեկտրոնային բանալու միջոցով: Անոդային շղթայի կարճատև խզման տարբերակը բերված է նկ. 6.1ա -ում, որտեղ S բանալին հաջորդաբար է միացված թիրիստորին: Էլեկտրոնային բանալու դեպքում կիրառված ընդհանուր լարումը բաշխվում է երկու` հաջորդաբար միացված կիսահաղորդչային տարրերի միջև:
Նկար 6.1բ տարբերակում թիրիստորը կարճատև շունտվում է S բանալու միջոցով: Էլեկտրոնային բանալու դեպքում նրա ուղիղ դիմադրությունը պետք է լինի զգալիորեն փոքր բաց թիրիստորի դիմադրությունից: Հակառակ դեպքում թիրիստորի փակում տեղի չի ունենա:
Կոնդենսատորի կիրառմամբ թիրիստորի փակման տարբերակ է ներկայացված նկ. 6.1գ -ում: Թիրիստորի բացման ժամանակ ձևավորվում է LC տատանողական կոնտուր: C կոնդենսատորի լիցքերով պայմանավորված հակառակ տատանման էներգիան փակում է թիրիստորին: Կոնդենսատորը լիցքաթափվում է R դիմադրության վրա, որից հետո սխեման նորից պատրաստ է հաջորդ ցիկլի աշխատանքին:
LC տատանողական կոնտուրի կիրառման տարբերակ է ներկայացված նկ. 6.1դ -ում, որտեղ այն միացված է VS թիրիստորին զուգահեռ: Թիրիստորի բացվելուց հետո C կոնդենսատորի լիցքերով պայմանավորված հակառակ հոսանքը փակում է թիրիստորին:
Նկար 6.1ե տարբերակում կիրառվում է տրանսֆորմատորային կապը, որի երկրորդային փաթույթը միացված է թիրիստորին հաջորդաբար: Թիրիստորը փակելու անհրաժեշտության դեպքում տրանսֆորմատորի առաջնային փաթույթին տրվում է հզոր ազդանշան առանձին աղբյուրից, որը տրանսֆորմացվում է երկրորդային փաթույթում՝ ստեղծելով թիրիստորի համար հակառակ հոսանք, ինչի արդյունքում այն փակվում է: Այդ տարբերակի հիմնական առավելությունը գալվանական կապի բացակայությունն է ուժային շղթայի և փակող ազդանշանի գեներատորի միջև: Երկրորդային փաթույթը կարող է միացվել թիրիստորին կամ բեռին հաջորդաբար, ինչպես նաև` զուգահեռ:
Ներկայացված տարբերակներից բացի` կիրառվում են նաև այլ համակցված տարբերակներ:
6.2. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԿՈՄՈՒՏԱՏՈՐ
Միաֆազ փոփոխական լարման թիրիստորային կոմուտատորի էլեկտրական սխեման և uսն սնման լարման ու iբեռ բեռի հոսանքի բնութագրերն ըստ t ժամանակի բերված են նկ. 6.2 -ում, որտեղ թիրիստորների կառավարման ազդանշանները ձևավորվում են դրանց անոդային լարումներից` օժանդակ S բանալու միջոցով:
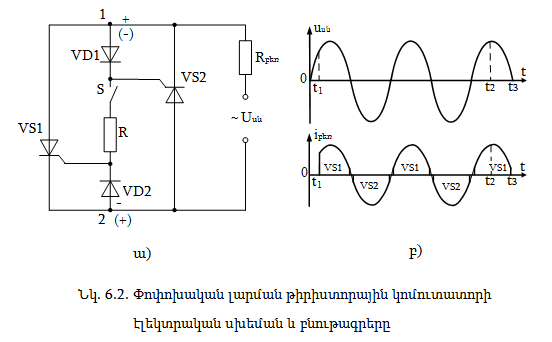
Ենթադրենք, երբ t1 պահին փակվում է S բանալին, 1 կետի պոտենցիալը դրական է, իսկ 2 -ինը` բացասական: Այդ դեպքում կառավարման ազդանշանը VD1-S-R շղթայի միջոցով տրվում է VS1 թիրիստորի կառավարման էլեկտրոդին, այն բացվում է և մնում այդ վիճակում մինչև տվյալ կիսապարբերության վերջը` այսինքն` անոդային հոսանքի` զրոյին հավասարվելը:
Հաջորդ կիսապարբերության ընթացքում, երբ 1 կետի պոտենցիալը բացասական է, իսկ 2 -ինը` դրական, կառավարման ազդանշանը VD2-R-S շղթայի միջոցով տրվում է VS2 թիրիստորի կառավարման էլեկտրոդին, բացվում է այն և մնում այդ վիճակում մինչև տվյալ կիսապարբերության վերջը, այսինքն` անոդային հոսանքի զրոյին հավասարվելը:
Քանի դեռ S բանալին փակ է, թիրիստորները բացվում և փակվում են հերթականությամբ` ապահովելով բեռի հոսանքի անցումը թիրիստորներով, որի մեծությունը պայմանավորված է հիմնականում սնման լարման և բեռի դիմադրության արժեքներով:
S բանալու բացման դեպքում (պահ t2) խզվում է թիրիստորների կառավարման շղթան, սակայն տվյալ պահին բաց վիճակում գտնվող թիրիստորը (ըստ նկ. 6.2 -ի` VS1 -ը) փակվում է ոչ թե անմիջապես, այլ կիսապարբերության վերջում (պահ t3), և այդ պահին բեռն անջատվում է սնման աղբյուրից: Բեռի անջատման ուշացումը գնահատվում է t3 -t2 ժամանակահատվածով:
Բեռի հոսանքի (0 -ական արժեքին մոտ) կտրտվածությունը պայմանավորվում է բեռի ակտիվ բնույթով և թիրիստորների փոխանջատման համար անոդ-կաթոդ որոշակի մեծության լարման անհրաժեշտությամբ:
R դիմադրության միջոցով սահմանվում է թիրիստորների կառավարման հոսանքի արժեքը, և դրա արժեքը պետք է լինի հնարավորինս փոքր, որպեսզի փոքրացվի թիրիստորների բացման ժամանակը:
Այդ սխեմայի սկզբունքով կարելի է ստեղծել եռաֆազ շղթաների թիրիստորային կոմուտատորներ:
6.3. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԻ ԹԻՐԻՍՏՈՐԱՅԻՆ ԹՈՂԱՐԿԻՉ
Հաստատուն հոսանքի ուժային շղթաները կոմուտացնելու համար հաճախ կիրառվում են թիրիստորների բազայի հիման վրա ստեղծվող թողարկիչներ:
Նկար 6.3 -ում պատկերված է հաստատուն հոսանքի թիրիստորային թողարկիչի էլեկտրական սխեման, որտեղ VS1 և VS2 թիրիստորներից յուրաքանչյուրը գտնվում է կայուն երկու` փակ կամ բաց վիճակից մեկում: Բաց վիճակի բերման համար հարկավոր է կարճատև սեղմել համապատասխան թիրիստորի կառավարման շղթայի SB հետդարձով կոճակը:
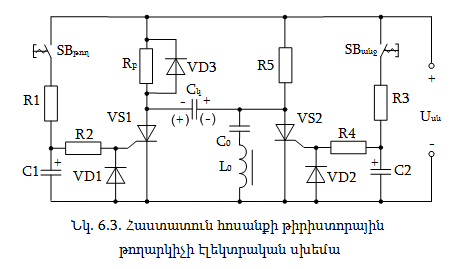
Սկզբնական
վիճակում
թիրիստորները
փակ
են
և
դրանց
անոդներին
միացված
Cկ
կոմուտացնող
կոնդենսատորը
լիցքաթափված
է:
Rբ բեռը
Uսն
սնման
աղբյուրին
միացնելու
համար
VS1
թիրիստորի
կառավարման
էլեկտրոդին
տրվում
է
կարճատև
լարման
ազդանշան`
սեղմելով
SBթող թողարկման
հետդարձով
կոճակը:
Դրա
շնորհիվ
թիրիստորը
բացվում
է,
և
Rբ բեռը
միանում
է
Uսն
սնման
աղբյուրին:
Միաժամանակ
C1
կոնդենսատորը
լիցքավորվում
է
մինչև
![]() արժեքը
(լիցքավորման
բևեռականությունը
ցույց
է
տրված
առանց
փակագծերի),
որի
iC լիցքավորման
հոսանքը
հոսում
է
R5
- Cկ -VS1
շղթայի
միջոցով.
արժեքը
(լիցքավորման
բևեռականությունը
ցույց
է
տրված
առանց
փակագծերի),
որի
iC լիցքավորման
հոսանքը
հոսում
է
R5
- Cկ -VS1
շղթայի
միջոցով.
![]()
Կոնդենսատորի
լիցքավորումը
մինչև
![]() արժեքը
կատարվում
է
հետևյալ
օրենքով.
արժեքը
կատարվում
է
հետևյալ
օրենքով.
![]()
Թիրիստորի
բացման
պահին
նրա
միջով
կանցնի
![]() i
ընդհանուր
հոսանք:
i
ընդհանուր
հոսանք:
Եթե որևէ պահի անհրաժեշտ է անջատել Rբ բեռի շղթան, ապա պետք է փակել VS1 թիրիստորը, որի համար պետք է բացել VS2-ը: Կարճատև սեղմելով հետդարձով SBանջ անջատման կոճակը` VS2 թիրիստորի կառավարման էլեկտրոդին տրվում է դրական ազդանշան, որի հետևանքով այն բացվում է և Cկ կոնդենսատորի լարումը կիրառվում է VS1 թիրիստորի կաթոդ-անոդ էլեկտրոդներին, որի համար այդ լարումը դառնում է հակառակ ուղղված: Կոնդենսատոր Cկ -ն լիցքաթափվում է VS2-VS1 շղթայով` ստեղծելով հակառակ հոսանք VS1 թիրիստորի համար, և երբ դրանով անցնող հոսանքը հավասարվում է զրոյի, այն փակվում է: Բեռն անջատվում է սնման աղբյուրից:
VS2 թիրիստորը փակելու և էներգիայի կորուստը R5 դիմադրության վրա դադարեցնելու համար սխեմայում գործում է L0C0 տատանողական շղթան, որում կուտակված էներգիայի շնորհիվ ստեղծվում է բաց VS2 թիրիստորի անոդային հոսանքին հակառակ հոսանք, և երբ հոսանքը VS2 -ով հավասարվում է զրոյի այն փակվում է: Թիրիստորային թողարկիչը վերադառնում է իր սկզբնական վիճակին:
Բեռը նորից սնման լարմանը միացնելու համար պետք է սեղմել SBթող թողարկման կոճակը:
Կոմուտացիոն Cկ կոնդենսատորի ունակության հաշվարկային արժեքը որոշվում է հետևյալ արտահայտությամբ.
![]()
որտեղ Iբեռ -ը բեռի հոսանքն է, tանջ -ը թիրիստորի անջատման ժամանակն է, UC -ն կոնդենսատորի վրայի լարումն է, K -ն գործակից է, որի մեծությունը բնութագրում է բեռի բնույթը` K=1...1,4, որի փոքր արժեքը համապատասխանում է ակտիվ-ինդուկտիվ բեռին, իսկ մեծ արժեքը` ակտիվ բեռին:
Բեռի թողարկման և անջատման կոճակների սեղմման հերթականությունը խախտելոււ դեպքում թողարկիչի աշխատանքի խափանում չի առաջանում:
R5 դիմադրության արժեքով պայմանավորվում են VS2 թիրիստորով անցնող հոսանքի մեծությունը, և Cկ կոնդենսատորի լիցքավորման ժամանակը:
Սխեմայում կիրառված R1, R2, C1, VD1 և R3, R4, C2, VD2 տարրերը նախատեսված են համապատասխանաբար VS1 և VS2 թիրիստորների կառավարման ազդանշանների ձևավորման և պաշտպանության համար, իսկ VD3 -ը` ինդուկտիվ բեռի կոմուտացիայից առաջացող գերլարումից VS1 թիրիստորը պաշտպանելու համար:
6.4. ԹԻՐԻՍՏՈՐԱՅԻՆ ԱՊԱՀՈՎԻՉ
Էլեկտրական շղթայում կարճ միացումը բնութագրվում է շղթայի դիմադրության կտրուկ նվազումով և համապատասխանաբար հոսանքի արագ աճով, որի արժեքն անվանական արժեքին կարող է գերազանցել տասնյակ և հարյուրավոր անգամներ: Այդպիսի վթարը խիստ բացասական` ջերմային և էլեկտրադինամիկական, ազդեցություն է գործում էլեկտրոնային սարքավորման վրա, որի հետևանքով էլեկտրոնային տարրերի կիսահաղորդչային շերտերը քայքայվում են ամբողջությամբ` դրանք դարձնելով ոչ պիտանի:
Գերբեռնվածության դեպքում շղթայում հոսանքի արժեքը կարող է բավականին գերազանցել անվանականին, ինչը նորից անթույլատրելի է էլեկտրոնային տարրերի համար:
Որքան մեծ է հոսանքի անվանական արժեքի նկատմամբ վթարային հոսանքի արժեքի պատիկությունը, այնքան արագ պետք է անջատվի շղթան, որպեսզի էլեկտրոնային տարրի կիսահաղորդչային շերտերը թույլատրվածից շատ չտաքանան և շարքից դուրս չգան:
Էլեկտրական ապահովիչների հիմնական նշանակությունը էլեկտրական շղթաները վթարային ռեժիմներից` կարճ միացումներից և գերբեռնվածությունից պաշտպանելն է և դրանց աշխատանքը բնութագրվում է երկու` իրարից խիստ տարբեր` նորմալ և վթարային (գերբեռնվածություն, կարճ միացում) ռեժիմներով: Էլեկտրոնային ապահովիչներում, որպես էլեկտրական շղթան վթարային ռեժիմներից պաշտպանող տարր, կիրառվում են բանալիային ռեժիմում աշխատող տրանզիստորը կամ թիրիստորը:
Նկար 6.4-ում բերված է Էլեկտրոնային ապահովիչի տարբերակներից մեկը` հիմնված VS թիրիստորի վրա, որը նախատեսված է հաստատուն հոսանքի շղթան գերբեռնվածությունից ու կարճ միացումից պաշտպանելու համար և միացվում է բեռի ու սնման աղբյուրի միջև: Ապահովիչի բանեցման հոսանքի արժեքը կարելի է սահուն կարգավորել որոշակի սահմանում` անկախ բեռի վրայի լարման արժեքից: Այն ունի բարձր հուսալիություն, լավ ջերմակայունություն և արագագործություն:
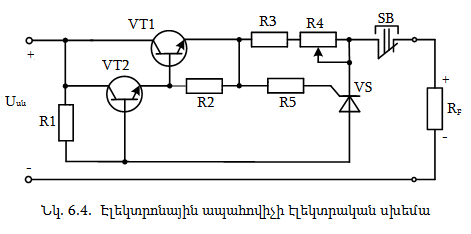
Աշխատանքային նորմալ ռեժիմում VS թիրիստորը փակ է, իսկ VT1 և VT2 տրանզիստորների հիման վրա կառուցված էլեկտրոնային բանալին բաց` շնորհիվ R1 -ով և VT2 –ի բազայով անցնող հոսանքի: Այդ դեպքում բեռի հոսանքն անցնում է էլեկտրոնային բանալու VT1 տրանզիստորի կոլեկտոր-էմիտեր շղթայով, R3 -ով և R4 -ով:
Գերբեռնվածության ժամանակ R3 -ի և R4 -ի վրայի լարման անկումը, հետևաբար նաև լարումը VS -ի կառավարման էլեկտրոդի վրա, մեծանում է` հասնելով թիրիստորի բացման արժեքին: VS թիրիստորի բացման արդյունքում փակվում է VT2 տրանզիստորի բազայի շղթան, ինչի հետևանքով նաև էլեկտրոնային բանալին: Բեռի հոսանքը կտրուկ փոքրանում է` հասնելով նվազագույն արժեքին:
Առաջացած վթարային ռեժիմի պատճառը վերացնելուց հետո պետք է կարճատև բացել SB կոճակի նորմալ փակ հպակը և նորից փակել այն: Այդ ընթացքում VS -ը փակվում է, իսկ VT1 -ը և VT2 -ը նորից` բացվում:
Ապահովիչի բանեցման հոսանքի արժեքը կարելի է գնահատել հետևյալ կերպ.
![]()
որտեղ UբացVS -ը թիրիստորի բացման լարման արժեքն է:
Ապահովիչի բանեցման հոսանքի արժեքը կարգավորվում է R4 փոփոխական դիմադրության միջոցով: R4 -ը կարելի է փոխարինել կոնկրետ մեծության դիմադրություններով` միացնելով դրանք շղթային փոխանջատիչի միջոցով:
6.5. ԲԵՌԻ ՀԶՈՐՈՒԹՅԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԿԱՐԳԱՎՈՐԻՉՆԵՐ
Բեռի հզորության փոփոխությունը կարելի է կատարել բեռի վրայի լարման կարգավորմամբ: Լարման կարգավորման ամենապարզ տարբերակը հաստատուն հոսանքի շղթայում իրականացվում է ռեոստատի, իսկ փոփոխական հոսանքի շղթայում` ավտոտրանսֆորմատորի միջոցով: Կարգավորման այդպիսի եղանակները պարզ են, բայց ունեն լուրջ թերություններ. փոքր ՕԳԳ, մեծ ծավալ ու կշիռ, կարգավորման ցածր հուսալիություն:
Նշված թերությունները հիմնականում վերացվում են կառավարվող փականների` թիրիստորների և սիմիստորների միջոցով: Այդպիսի սխեմաները լայնորեն օգտագործվում են ջեռուցիչների, լուսավորման աղբյուրների, էլեկտրաշարժիչների և այլ տեսակի բեռների հզորության կարգավորման համար:
Կառավարվող ուղղիչային կերպափոխիչնրը (բաժին 8.3) հաստատուն հոսանքի բեռի հզորության կարգավորիչներ են և մեծ տարածում ունեն:
Նկար 6.5 -ում տրված են բեռի հզորության թիրիստորային կարգավորիչի էլեկտրական սխեման և բեռի uբ լարման և iբ հոսանքի ժամանակային բնութագրերը: Սխեմայում հաստատուն հոսանքի Rբեռ բեռը միացվում է VD1...VD4 կամրջակային ուղղիչից հետո` VS թիրիստորին հաջորդաբար, իսկ փոփոխական հոսանքի Zբեռ բեռը` սնման աղբյուրից հետո` մինչ կամրջակային ուղղիչը: Սնման տարաբևեռ լարումը կամրջակային VD1...VD4 ուղղիչի միջոցով կերպափոխվում է հաստատուն բաբախող լարման:
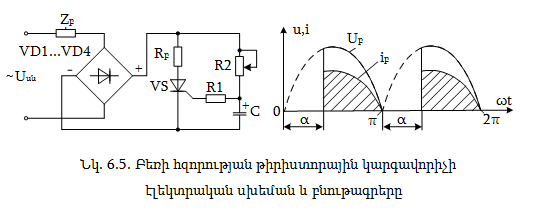
Եթե թիրիստորը բաց է բաբախող լարման պարբերության ողջ ընթացքում, բեռի հոսանքի տևողությունը կլինի առավելագույն, իսկ եթե բացվի պարբերության մի մասի ընթացքում, բեռի հոսանքի տևողությունը ավելի քիչ կլինի: Թիրիստորի բացման չափը սահուն կարգավորելու դեպքում բեռի հոսանքը, լարումը՝ հետևաբար նաև հզորությունը, նույնպես սահուն կկարգավորվի:
VS թիրիստորի
բացման
համար նրա
կառավարման
էլեկտրոդին
տրվում
է ազդանշան
R2-C-R1
շղթայով:
C
կոնդենսատորի
լիցքավորման
ժամանակը
պայմանավորված
է նրա
ունակությամբ
և R2 դիմադրության
արժեքով:
ՈՒղղված
լարման
կարգավորումն
իրականացվում
է
թիրիստորի
վրայի
ուղիղ
լարման
և
կառավարման
լարումների
միջև
![]() անկյան
շեղմամբ,
որը
կոչվում
է
կառավարման
անկյուն:
Այդ
անկյունը
ձևավորվում
է
փուլապտտող
R2-C շղթայի
միջոցով:
անկյան
շեղմամբ,
որը
կոչվում
է
կառավարման
անկյուն:
Այդ
անկյունը
ձևավորվում
է
փուլապտտող
R2-C շղթայի
միջոցով:
Որքան մեծ են C -ի ունակությունը և R2 -ի դիմադրությունը, այնքան դանդաղորեն C -ն կլիցքավորվի և ընդհակառակը: Հետևաբար, VS -ի կառավարման էլեկտրոդի վրա ձևավորվող ազդանշանի ամպլիտուդը կախված է C -ի լիցքավորման ժամանակից, որի համար էլ, որպեսզի հնարավոր լինի կարգավորել այդ ժամանակը, R2 դիմադրությունն ընդունվում է փոփոխական մեծություն:
Այդպիսի սխեմայով հնարավոր է դառնում կարգավորել կոնդենսատորի լիցքավորման ժամանակը, հետևաբար թիրիստորի բացման պահը և այդ վիճակում գտնվելու տևողությունը, ինչի արդյունքում ստացվում է բեռի հզորության կարգավորում: Բեռի հզորության կարգավորման որակի բարձրացման համար կիրառվում են կառավարման բարդ սխեմաներ:
Բաբախող լարման յուրաքանչյուր պարբերության վերջում կոնդենսատորը լիցքաթափված է լինում, իսկ թիրիստորը` փակ: Հաջորդ պարբերության սկզբում C -ն սկսում է լիցքավորվել և որոշակի ժամանակ հետո VS -ը բացվում է:
Փոփոխական լարման բեռի հզորության միաֆազ սիմիսթորային կարգավորիչի էլեկտրական սխեման և նրա աշխատանքը ներկայացնող բնութագրերը բերված են նկ. 6.6 -ում, որտեղ փոփոխական հոսանքի բեռի հզորությունը կարգավորվում է զուգահեռ-հանդիպակաց ուղղություններով միացված VS1 և VS2 թիրիստորների (սիմիսթոր) կառավարման միջոցով` կառավարող բլոկի (ԿԲ) կողմից: Հերթով բացելով թիրիստորները, կախված կառավարման α անկյան մեծությունից, հնարավոր է դառնում կարգավորել բեռի վրայի լարման տևողությունը, հետևաբար նաև` հոսանքը, իսկ արդյունքում` հզորությունը:
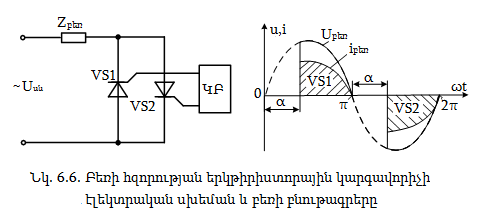
Եռաֆազ լարման բեռի հզորության կարգավորման համար կիրառվում են եռաֆազ կարգավորիչներ: Նկար 6.7 -ում բեռի հզորությունը կարգավորվում է զուգահեռ-հանդիպակաց միացված թիրիստորների կառավարման միջոցով, իսկ նկ. 6.8 -ում` զուգահեռ-հանդիպակաց միացված թիրիստոր-դիոդ զույգի միջոցով:
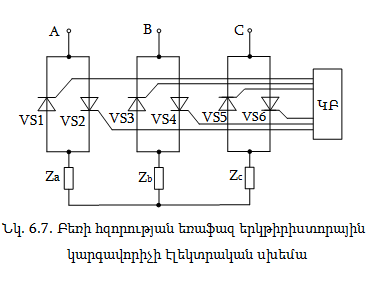
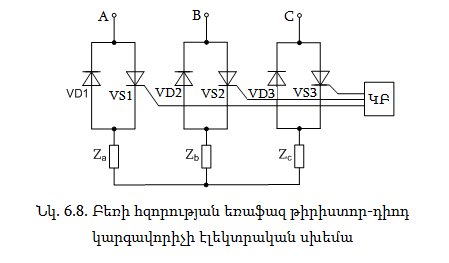
Թիրիստոր-դիոդ կարգավորիչի էլեկտրական սխեմայում բեռի հզորությունը կարգավորվում է տարաբևեռ լարման մի կիսապարբերության ընթացքում:
7. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐ
7.1. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ՏԱՐՐԵՐԻ ՏԵՍԱԿՆԵՐ
Ֆոտոէլեկտրական ընդունիչները` ֆոտոընդունիչները, սարքեր են, որոնք լուսային ազդանշանի ճառագայթման էներգիան կերպափոխում են էլեկտրական էներգիայի: Լայն տարածում ունեն կիսահաղորդչային ֆոտոընդունիչները, որոնք ունեն փոքր չափսեր, կշիռ և ինքնարժեք (նկ. 7.1):
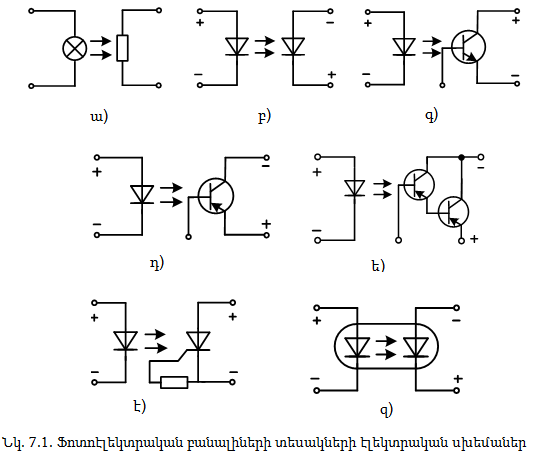
Որպես լույսի աղբյուր կարող է կիրառվել սովորական շիկացման թելիկով լամպը կամ լուսադիոդը: Գործնականում լայն տարածում ունեն լուսադիոդները, քանի որ ունեն աշխատանքային մեծ ժամկետ, փոքր չափսեր ու կշիռ, քիչ ծախսվող հզորություն և աշխատելիս համարյա չեն տաքանում:
Նկար 7.1 -ում պատկերված կիսահաղորդչային ֆոտոընդունիչներն են. ֆոտոդիմադրությունը` ա), ֆոտոդիոդը` բ), ֆոտոտրանզիստորը n-p-n` գ), կամ p-n-p` դ), կազմովի ֆոտոտրանզիստորը` ե) և ֆոտոթիրիստորը` զ):
Բոլոր տեսակի ֆոտոէլեմենտների աշխատանքի սկզբունքը նույն է ինչ սովորականներինը, միայն տարբերվում են այնքանով, որ կառավարվում են լույսի հոսքով: Այսպես, ֆոտոդիմադրությունը լուսավորելիս էլեկտրական դիմադրությունը խիստ փոքրանում է, իսկ ֆոտոդիոդի, ֆոտոտրանզիստորի և ֆոտոթիրիստորի դիմադրությունը հավասարվում է գրեթե զրոյի, քանի որ լրիվ բացվում են:
Ֆոտոընդունիչի հիմնական բնութագրերն են` արագագործությունը և զգայնությունը: Ֆոտոընդունիչի արագագործության բարձրացումը առաջ է բերում զգայնության նվազմանը և հակառակը` զգայունության բարձրացումը հանգեցնում է ֆոտոընդունիչի արագագործության նվազմանը:
Եթե VD ֆոտոընդունիչը միացվում է DA օպերացիոն ուժեղարարի մուտքին համաձայն նկ. 7.2ա -ի, այն դառնում է հոսանքի գեներատոր, իսկ եթե միացվում է համաձայն նկ. 7.2բ -ի` էլեկտրաշարժ ուժի գեներատոր:
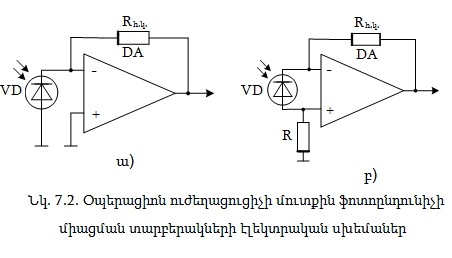
Օպտրոնները սարքեր են, որտեղ մեկ ընդհանուր իրանի մեջ գտնվում են օպտիկական միջավայրով իրար հետ կապված կիսահաղորդչային լույսի աղբյուրը` լուսադիոդը և ֆոտոընդունիչը: Դրանցում մուտքային էլեկտրական ազդանշանը փոխարկվում է օպտիկականի, այնուհետև օպտիկականի վերափոխարկումը էլեկտրական ելքի ազդանշանի: Կախված ֆոտոընդունիչի տեսակից` օպտրոնները լինում են դիոդով, տրանզիստորով, թիրիստորով` առանց կառավարման էլեկտրոդի և կառավարման էլեկտրոդով, ֆոտոդիմադրությամբ և այլն: Նկար 7.1է -ում պատկերված է դիոդ-դիոդ օպտրոնը:
Ֆոտոընդունիչների հիման վրա կառուցվում են ֆոտոէլեկտրական բանալիներ, որոնց աշխատանքի սկզբունքը հիմնված է ֆոտոզգայուն տարրի լուսավորման չափի փոփոխման վրա: Լուսավորման չափը կարելի է փոփոխել լույսի աղբյուրի պայծառության փոփոխմամբ, կառավարող տարրի տեղաշարժման միջոցով և այլ միջոցներով:
Ֆոտոէլեկտրական բանալիների միջոցով ապահովվում է հուսալի էլեկտրական գալվանական խզում մուտքի և ելքի շղթաների միջև, ինչը թույլ է տալիս ցածր լարմամբ կառավարել բարձր լարում: Դրանց վրա ստեղծվում են բազմազան էլեկտրոնային սարքեր. էլեկտրոնային ռելեներ, կոմուտատորներ, հպարկիչներ, թողարկիչներ և այլ սարքեր, որոնք առանձնանում են կառավարման սխեմայի պարզությամբ, հուսալիությամբ և աղավաղումներից պաշտպանվածությամբ: Մուտքի և ելքի շղթաների միջև մեկուսչի դիմադրությունը կազմում է 1012…1014 Օմ, իսկ ունակությունը` 10…12 պֆ:
7.2. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ՃԱՆԱՊԱՐՀԱՅԻՆ ԱՆՋԱՏԻՉՆԵՐ
Ֆոտոէլեկտրական տարրերի հիման վրա կառուցվում են բազմազան ճանապարհային անջատիչներ` մարմնի տեղաշարժը կամ դիրքը հսկելու համար: Այդ սարքերում կառավարումը կարող է իրականացվել տեղաշարժվող անթափանց տարրի կողմից լույսի ճառագայթի հոսքի ընդհատման միջոցով, կամ հսկվող մարմնի մակերևույթի վրայից լույսի հոսքի անդրադարձման միջոցով, որի հետևանքով լուսավորվում է ֆոտոընդունիչը:
Ֆոտոէլեկտրական ճանապարհային անջատիչի աշխատանքի սկզբունքը հիմնված է ֆոտոզգայուն տարրի լուսավորման չափի փոփոխման վրա, որը կատարվում է կառավարող տարրի տեղաշարժման միջոցով (նկ. 7.3): Ճանապարհային անջատիչի կազմի մեջ մտնում են ֆոտոընդունիչը (ՖԸ), լույսի աղբյուրը (ԼԱ) և կառավարող տարրը (ԿՏ): Որպես ֆոտոընդունիչ կարող են կիրառվել` ֆոտոդիմադրությունը, ֆոտոդիոդը, ֆոտոտրանզիստորը, ֆոտոթիրիստորը:
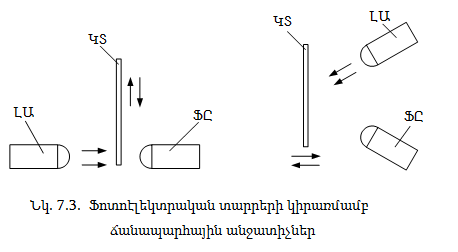
Նկար 7.4 -ում պատկերված է ֆոտոէլեկտրական ճանապարհային անջատիչի էլեկտրական սխեման, որտեղ որպես լույսի աղբյուր կիրառված է VD1 լուսադիոդը, իսկ ֆոտոընդունիչ` VT ֆոտոտրանզիստորը, որպես բեռ ծառայում է էլեկտրամագնիսական ռելեի K փաթույթը:
R1 դիմադրության միջոցով սահմանվում է լուսադիոդի աշխատանքային հոսանքի մեծությունը, իսկ R2 և R3 դիմադրությունների միջոցով սահմանվում է VT ֆոտոտրանզիստորի աշխատանքային ռեժիմը: VD2 դիոդը պաշտպանում է սխեման սնման լարման սխալ միացման բևեռականությունից: Կառավարող տարրի բացակայության դեպքում ֆոտոտրանզիստորը լուսավորված է լուսադիոդի միջոցով, որի հետևանքով այն բաց վիճակում է: Էլեկտրամագնիսական ռելեի K փաթույթը միացված է Eսն սնման աղբյուրին, իսկ ռելեի հպակի միջոցով Zբ բեռը միացված է փոփոխական uնման լարմանը:
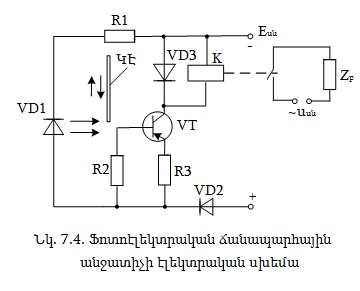
Կառավարող տարրի տեղաշարժով փակվում է լույսի հոսքի ճանապարհը, ֆոտոտրանզիստորը փակվում է, ռելեի փաթույթը հոսանքազրկվում է և իր հպակի միջոցով բեռն անջատում սնման աղբյուրից:
VD3 դիոդը նախատեսված է տրանզիստորը պաշտպանելու ռելեի K փաթույթի փոխանջատումից առաջացող գերլարման վտանգներից:
Ֆոտոտրանզիստորի փոխարեն կարելի է օգտագործել նաև ֆոտոդիոդ կամ ֆոտոթիրիստոր, իսկ էլեկտրամագնիսական ռելեն փոխարինել էլեկտրոնայինով:
7.3. ՖՈՏՈԷԼԵԿՏՐԱԿԱՆ ՌԵԼԵՆԵՐ
Ֆոտոզգայուն տարրի` ֆոտոընդունիչի վրա կառուցվում են զանազան ռելեներ, որոնք կիրառվում են արտադրությունում թողարկվող արտադրանքի քանակի հաշվման ավտոմատ սարքերում, լուսավորման պայծառության հսկման, կարգավորման, կառավարման, պաշտպանության և այլ համակարգերում:
Ֆոտոընդունիչի միջոցով ռելեի մուտքային լուսային ազդանշանը կերպափոխվում է էլեկտրականի:
7.3.1. ԼՈՒՍԱԶԳԱՅՈՒՆ ՌԵԼԵՆԵՐ
Որպես լուսազգայուն ռելեի օրինակ նկ. 7.5 -ում բերված է պարզագույն էլեկտրական սխեմա, որի բանեցումը կախված է VD1 ֆոտոդիոդի վրայի լույսի հոսքի մեծությունից: Սկզբնական վիճակում, օրինակ, երբ լույսի հոսքը բացակայում է, ֆոտոդիոդի ներքին դիմադրությունը մեծ է` այն փակ է, դրանով անցնող հոսանքը չնչին է, որի պատճառով VT տրանզիստորը փակ է, հերկոնային ռելեի K փաթույթը հոսանքազրկված է, և նորմալ բաց հերկոնին հաջորդաբար միացված Zբ բեռն անջատված է փոփոխական uսն uնման լարման աղբյուրից:

VD1 ֆոտոդիոդը բարձր ինտենսիվությամբ լույսի հոսքով լուսավորելիս ներքին դիմադրությունը կտրուկ փոքրանում է, տրանզիստորի բազայի շղթայով անցնող հոսանքն աճում է, տրանզիստորը բացվում է, և հերկոնային ռելեի K փաթույթը միացվում է Eսն սնման աղբյուրին: Ռելեի փաթույթով հոսանքի կտրուկ աճի հետևանքով այն գործում է և հերկոնի փակվելով Zբ բեռը միացվում է uսն uնման լարման աղբյուրին:
VD1 ֆոտոդիոդը կրկին մթնեցնելով` ներքին դիմադրությունը կտրուկ կմեծանա, տրանզիստորը կփակվի, և բեռը կանջատվի սնման աղբյուրից:
VD2 դիոդը նախատեսված է տրանզիստորը պաշտպանելու ռելեի K փաթույթի փոխանջատումից առաջացող գերլարման առաջացումից:
Հերկոնային ռելեն կարելի է փոխարինել էլեկտրոնայինով կամ էլեկտրամագնիսականով:
7.3.2. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՕՊՏՐՈՆԱՅԻՆ ՓՈԽԱՆՋԱՏԻՉ
Նկար 7.6 -ում բերված է օպտրոնային փոխանջատիչի էլեկտրական սխեման, որտեղ մուտքային կառավարման և ելքային կառավարվող շղթաների միջև առկա է գալվանական խզում:
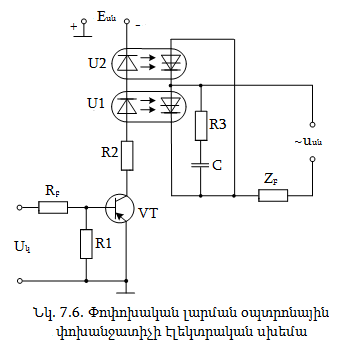
Փոխանջատիչի կառուցվածքում գործում են U1 և U2 օպտրոնները, որոնց լուսադիոդները սնվում են Eսն հաստատուն լարման աղբյուրից: Դրանց կառավարումն իրականացվում է ընդհանուր էմիտերով միացված VT տրանզիստորային բանալու միջոցով:
Սկզբնական վիճակում տրանզիստորը փակ է` ի հաշիվ բազային դրական պոտենցիալի, որն ապահովվում է R1 դիմադրության միջոցով, քանի որ այն միացված է սնման աղբյուրի դրական բևեռին: Մուտքային uկ կառավարման բացասական լարմամբ անհրաժեշտ բազային հոսանքի դեպքում բացվում է տրանզիստորը, և սնման լարումը տրվում է լուսադիոդներին, ինչի շնորհիվ տեղի է ունենում օպտիկական ճառագայթում: Որպես ֆոտոէլեմենտներ կիրառվում են ֆոտոթիրիստորները, որոնք ուժային շղթայում միացված են բեռին հաջորդաբար, և բացվելով յուրաքանչյուրն իր միջով անցկացնում է բեռի տարաբևեռ հոսանքի կիսապարբերություններց մեկը: C-R3 շղթան, որը միացված է ֆոտոթիրիստորներին զուգահեռ, պաշտպանում է դրանց ինդուկտիվ բնույթի բեռի անջատումից առաջացող գերլարումներից:
Օպտրոնային փոխանջատիչները կիրառվում են միաֆազ և եռաֆազ շղթաներում ասինխրոն շարժիչների, ուժային էլեկտրամագնիսների և այլ տեսակի բեռների կառավարման համար:
7.3.3. ԼՈՒՍԱՅԻՆ ՀՈՍՔԵՐԻ ՏԱՐԲԵՐՈՒԹՅԱՆ ՖՈՏՈՌԵԼԵ
Հաշվեկշռային ուժեղացուցիչի հիմքի վրա կառուցվում է ֆոտոէլեկտրոնային ռելե, որի միջոցով հնարավոր է դառնում հսկել երկու լուսային հոսքերի տարբերությունը (նկ. 7.7):
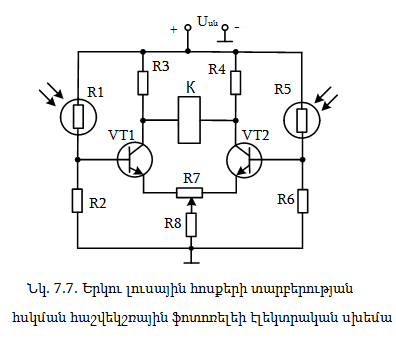
Կամրջակի
հիման
վրա
կառուցված
հավասարակշռված
ուժեղարարում
R3 և R4 դիմադրությունները
ձևավորում
են
կամրջակի
երկու
թևը,
իսկ
մյուս
երկուսը`
VT1 և VT2 միատեսակ
տրանզիստորները:
Eսն սնման
լարումը
միացված
է
կամրջակի
մի
անկյունագծում
R7 և R8 դիմադրությունների
միջոցով,
իսկ
մյուս
անկյունագծում`
էլեկտրամագնիսական
ռելեի
K փաթույթը:
Եթե
R3 = R4 և
R1 ու R5 ֆոտոդիմադրությունները
լուսավորված
են
հավասարապես,
ապա
կամրջակը
հավասարակշռված
է,
այսինքն`
1 և 2 կետերի
համապատասխանաբար
![]() պոտենցիալներն
իրար
հավասար
են`
պոտենցիալներն
իրար
հավասար
են`
![]() Ֆոտոէլեկտրոնային
ռելեի
համար
բեռ
հանդիսացող
էլեկտրամագնիսական
ռելեի
K փաթույթով
հոսանքը
հավասար
է
զրոյի`
քանի
որ
Ֆոտոէլեկտրոնային
ռելեի
համար
բեռ
հանդիսացող
էլեկտրամագնիսական
ռելեի
K փաթույթով
հոսանքը
հավասար
է
զրոյի`
քանի
որ
![]()
Սնման
լարման
փոփոխությունը
կամ
շրջապատի
ջերմաստիճանի
փոփոխությունը
հավասարաչափ
է
ազդում
տրանզիստորների
վրա
և
կամրջակը
շարունակում
է
գտնվել
հավասարակշռված
վիճակում:
Կամրջակի
հավասարակշռության
բարձրացման
համար
նախատեսված
է
R7 փոփոխական
դիմադրությունը,
որի
միջոցով
ապահովվում
է![]() պայմանը:
պայմանը:
Ֆոտոդիմադրություններից
մեկի
վրա
ընկնող
լուսային
հոսքի
փոփոխման
դեպքում
փոխվում
է
համապատասխան
տրանզիստորի
բազայի
պոտենցիալը`
առաջացնելով
կոլեկտորային
հոսանքի
փոփոխություն:
Խախտվում
է
սխեմայի
հավասարակշռությունը,
այսինքն`
![]() և
պոտենցիալների
տարբերության
հետևանքով
ռելեի
փաթույթով
հոսանք
է
անցնում,
որն
էլ
առաջացնում
է
ռելեի
բանեցում:
Ռելեի
բանեցմամբ
փաստվում
է
ֆոտոէլեմենտների
վրայի
լույսերի
հոսքերի
տարբերության
որոշակի
շեմի
գերազանցումը:
և
պոտենցիալների
տարբերության
հետևանքով
ռելեի
փաթույթով
հոսանք
է
անցնում,
որն
էլ
առաջացնում
է
ռելեի
բանեցում:
Ռելեի
բանեցմամբ
փաստվում
է
ֆոտոէլեմենտների
վրայի
լույսերի
հոսքերի
տարբերության
որոշակի
շեմի
գերազանցումը:
7.4. ՕՊՏՐՈՆԻ ԿԻՐԱՌՄԱՄԲ ԹԻՐԻՍՏՈՐԱՅԻՆ ԲԱՆԱԼԻ
Նկար 7.8 -ում բերված է օպտրոնի կիրառմամբ թիրիստորային բանալու էլեկտրական սխեման, որտեղ գործում է գալվանական խզում բանալու կառավարման մասի և բեռի շղթան կոմուտացնող թիրիստորի շղթայի միջև:
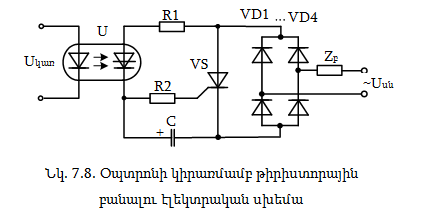
Կառավարման Uկառ իմպուլսի դեպքում լուսադիոդի ազդանշանից բացվում է U օպտրոնի դինիստորը, որին հաջորդում է VS թիրիստորի բացվելը, և բեռը միացվում է սնման աղբյուրին: Նկարում Zբ բեռը փոփոխական լարման է, որի համար այն միացված է մինչ VD1…VD4 կամրջակային ուղղիչը:
Հաստատուն լարման բեռի դեպքում այն պետք է միացնել թիրիստորին հաջորդաբար: Բեռի ինդուկտիվ բնույթի դեպքում նրան զուգահեռ` հակառակ բևեռականությամբ պետք է միացվի դիոդ (նկ. 7.5):
R1 դիմադրությունը նախատեսված է սահմանափակելու դինիստորով անցնող հոսանքի մեծությունը` երբ այն բաց է, իսկ երբ փակ է` նվազեցնելու նրա վրա ընկնող լարման չափը: R2 դիմադրությունը նախատեսված է սահմանափակելու թիրիստորի կառավարման հոսանքի մեծությունը: C կոնդենսատորն ապահովում է թիրիստորի բացման որոշակի ուշացում` մարելով անցողիկ երևույթները կառավարման շղթայում:
7.5. ԼԱՐՄԱՆ ԱՐԺԵՔԻ ՀՍԿՄԱՆ ՌԵԼԵՆԵՐ
Տեխնոլոգիական գործընթացներում լարման մակարդակի հսկումը կարելի է իրականացնել լուսադիոդների միջոցով:
Լարման արժեքների հսկման սարքում լուսադիոդների կիրառմամբ գրանցվում է երկու հաստատուն լարման արժեքների տարբերության առկայությունը (նկ. 7.9):
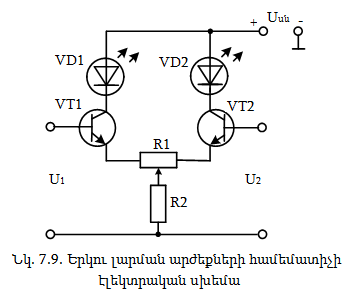
Այդ սարքում լարման արժեքները համեմատվում են բալանսային ուժեղարարի միջոցով, որտեղ երկու VT1 և VT2 տրանզիստորների համար բեռ են հանդիսանում VD1 և VD2 լուսադիոդները: Այդպիսի սարքերի առանձնահատկությունն այն է, որ լարումների համեմատումը և տարբերության առկայության ազդարարումը կատարվում են մի ընդհանուր կասկադում:
Կամրջակի հիման վրա կառուցված բալանսային ուժեղարարում R1 փոփոխական դիմադրության միջոցով տրանզիստորների շղթաները բերվում են հավասար վիճակի` ապահովելով այնպիսի հոսանք, որ լուսադիոդները գտնվեն սահմանային լուսավորման վիճակում: Հսկվող U1 կամ U2 լարումներից մեկի աճի դեպքում մեծանում է համապատասխան տրանզիստորի կոլեկտորային հոսանքը, որի ազդեցությամբ լուսավորվում է շղթայի լուսադիոդը:
Հսկվող լարման արժեքի մեծության ընդհատ գնահատման համար կիրառելի է նկ. 7.10 -ում բերված ռելեի սխեման: VT1…VT3 տրանզիստորների բացման լարման մեծությունները պայմանավորված են հսկվող մուտքային լարման արժեքներով և R2...R4 դիմադրություններով: Որևէ լուսադիոդի լուսավորմանը համապատասխանում է մուտքային լարման որոշակի մեծություն:
Եթե մուտքային Uմ լարումը չի հասել անհրաժեշտ նվազագույն մակարդակին, VT1…VT3 տրանզիստորները փակ են, Եվ տրամաբանական DD1.1…DD1.3 տարրերի մուտքերում և դրանց ելքում ունենք 1 մակարդակ, որի հետևանքով HL1…HL3 լուսադիոդները չեն լուսավորվում: Երբ մուտքային լարումը հասնում է որոշակի մակարդակի, VT1 -ը բացվում է, և կոլեկտորի վրայի լարումը` DD1.1 -ի մուտքի լարումը, նվազում է` դառնալով մոտավորապես զրո, և DD1.1 -ի ելքում սահմանվում է 0 մակարդակ, և HL1 -ը լուսավորվում է:
Մուտքային Uմ լարման հետագա աճը հանգեցնում է հաջորդ լուսադիոդների լուսավորմանը:
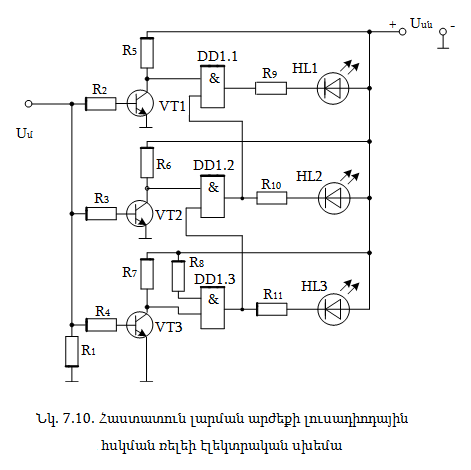
8. ԷԼԵԿՏՐԱԿԱՆ ԷՆԵՐԳԻԱՅԻ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Էլեկտրատեխնիկական համակարգերի և սարքավորումների շահագործման ժամանակ հաճախ է առաջանում էլեկտրական էներգիայի կերպափոխման խնդիրը: Կերպափոխումը կարող է լինել փոփոխական լարման հաճախականության վերափոխումը մեկ այլ հաճախականության կամ հաստատուն լարման կերպափոխումը փոփոխական լարման և այլն:
Այն սարքերը, որոնք կատարում են նման կարգի գործողություններ, կոչվում են կերպափոխիչներ:
8.1. ԷԼԵԿՏՐԱԿԱՆ ԷՆԵՐԳԻԱՅԻ ԿԵՐՊԱՓՈԽԻՉՆԵՐԻ ՏԵՍԱԿՆԵՐԸ
Ըստ աշխատանքի սկզբունքի տարբերակվում են մեխանիկական (օրինակ` տատանողական, էլեկտրամեքենայական) և ստատիկ կերպափոխիչներ:
Ստատիկ կերպափոխիչները չունեն մեխանիկական շարժական հանգույցներ. որոնք կառուցվում են էլեկտրոնային տարրերով` տրանզիստորներով և թիրիստորներով, ինչը նպաստում է սարքի հուսալիության մեծացմանը, կորուստների նվազմանը և երկարակեցությանը:
Նկար 8.1 -ում պատկերված են ստատիկ կերպափոխիչների բլոկ-սխեմաների կառուցվածքային սկզբունքները.
ա) ինվերտորը,
բ) հաճախականային կերպափոխիչը` ցիկլոկոնվերտորը,
գ) ուղղիչը,
դ) կոնվերտորը:
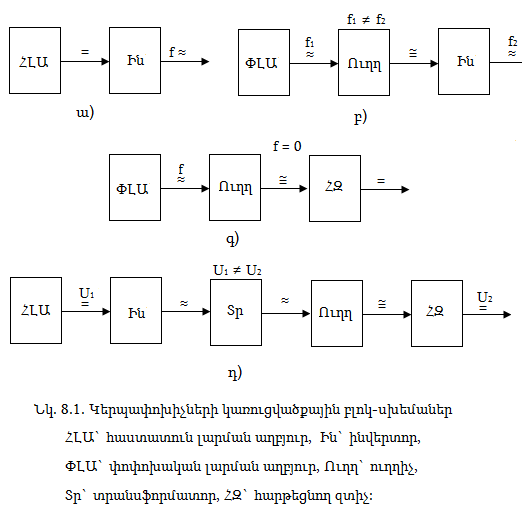
Նկար 8.1ա -ում հաստատուն լարումը ինվերտորի միջոցով վերածվում է կոնկրետ հաճախականությամբ փոփոխական լարման, նկ. 8.1բ -ում փոփոխական լարումն ուղղվում է ուղղիչի միջոցով և հետո ինվերտորի միջոցով վերածվում է մեկ այլ հաճախականության փոփոխական լարման: Այդտեղ կարող է տեղի ունենալ ինչպես հաճախականության բարձրացում, այնպես էլ` ցածրացում: Բերված բլոկ-սխեմային համապատասխան էլեկտրական սխեման կոչվում է բացահայտ օղակով հաճախականաին կերպափոխիչ, իսկ եթե ակնհայտ բացակայում է ուղղիչը, այն կկոչվի թաքուն օղակով հաճախականաին կերպափոխիչ: Հաճախականաին կերպափոխիչին այլ կերպ կոչվում է ցիկլոկոնվերտոր:
Փոփոխական լարման վերածումը ուղղիչի միջոցով հաստատուն բաբախող լարման, որտեղ կերպափոխված լարման հաճախականությունը հավասար է զրոյի, կարող է դիտվել որպես հաճախականաին կերպափոխման մասնավոր դեպք (նկ. 8.1գ): Ելնելով ուղղված լարմանը ներկայացվող պահանջներից` բեռի և ուղղիչի միջև կարող է միացվել հարթեցնող զտիչ:
Համաձայն նկ. 8.1դ -ի բլոկ-սխեմայի, հաստատուն լարումը վերածվում է մեկ այլ հաստատուն լարման, որը, կախված խնդրի պահանջից, կարող է մեծ կամ փոքր լինել մուտքային լարումից: Այդտեղ մուտքային հաստատուն լարումը ինվերտորի միջոցով վերածվում է փոփոխական լարման, որը բարձրացվում կամ ցածրացվում է (կախված խնդրի պահանջից) տրանսֆորմատորի միջոցով մեկ այլ փոփոխական լարման, ուղղվում է ուղղիչի միջոցով և, կախված ելքային լարմանը ներկայացվող պահանջներից, կարող է հարթեցվել զտիչի միջոցով և տրվել բեռին:
Կերպափոխիչների հիմնական պարամետրերը, որոնք բնութագրում են նրանց արդյունավետությունը և որակի ցուցանիշները, հետևյալն են.
- ՕԳԳ -ն, որը որոշվում է կերպափոխված լարման հզորության և սնման լարման աղբյուրի հզորության հարաբերությամբ,
- ելքային լարման հաճախականության կայունությունը տարբեր գործոնների` կերպափոխվող հոսանքի աղբյուրի լարման անկայունության, ջերմաստիճանի, բեռի դիմադրության և այլ ազդեցությունների դեպքերում,
- ելքային լարման բաբախումը,
- ելքային լարման ձևը,
- բեռնային բնութագիրը, որը ելքային լարման և հոսանքի (կամ բեռի դիմադրության) միջև կախվածությունն է,
- կշիռը,
- ինքնարժեքը,
- եզրաչափերը և այլն:
8.2. ՉԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Հաստատուն լարման բեռի սնումն ապահովելու համար կիրառվում են ուղղիչային սխեմաներ, որոնց միջոցով փոփոխական տարաբևեռ լարումը (այսուհետ` փոփոխական լարում) կերպափոխվում է բաբախող միաբևեռ լարման:
ՈՒղղիչները բաժանվում են երկու խմբի` չկառավարվող և կառավարվող: Չկառավարվող ուղղիչները կառուցվում են դիոդներով, որոնց փակ կամ բաց վիճակը պայմանավորված է անոդ-կաթոդ կիրառված լարման բևեռականությամբ: Կառավարվող ուղղիչները ստեղծվում են հիմնականում թիրիստորների հիման վրա, որոնց փակ կամ բաց վիճակը պայմանավորված է անոդ-կաթոդ կիրառված լարման բևեռականությամբ և կառավարող ազդանշանով:
ՈՒղղիչներն ըստ մուտքային լարման ֆազերի թվի լինում են միաֆազ և եռաֆազ: Միաֆազ ուղղիչներն ըստ ուղղված ելքային լարման լինում են` միակիսապարբերական և երկկիսապարբերական:
8.2.1. ՄԻԱՖԱԶ ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Միաֆազ փոփոխական հոսանքի ուղղման համար հիմնականում կիրառվում են միակիսապարբերական, երկկիսապարբերական` տրանսֆորմատորի միջինացված կետով, և կամրջակային ուղղիչային կերպափոխիչները, որոնց սխեմային լուծումները և լարումների ու հոսանքների բնութագրերն ըստ ժամանակի բերված են համապատասխանաբար` նկ. 8.2 -ում և նկ. 8.3 -ում:
Թվարկված սխեմաները կարող են աշխատել տարբեր բնույթի բեռների դեպքում:
Դիտարկենք միաֆազ լարման ուղղիչային կերպափոխիչների աշխատանքն առանձին-առանձին:
Միակիսապարբերական ուղղիչային կերպափոխիչ (նկ. 8.2):
Սրա կառուցվածքն ամենապարզն է, քանի որ օգտագործվում է մեկ VD դիոդ, որով հոսանքն անցնում է լարման մեկ կիսապարբերության ընթացքում և արդյունքում մուտքային փոփոխական u2 լարումը Rբ բեռի վրա կերպափոխվում է միակիսապարբերանի ուղղված բաբախող Uբ լարման: Բեռը սնվում է լարման մի կիսապարբերության ընթացքում:
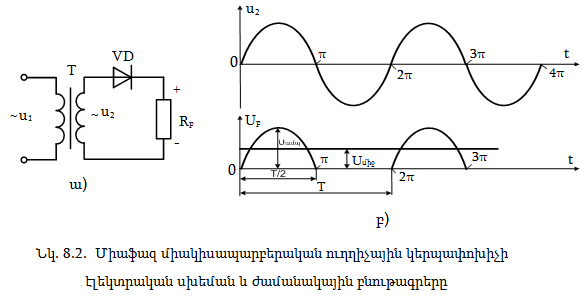
Դրանում ուղղիչը կարելի է միացնել անմիջապես մուտքային u1 լարմանը` առանց T տրանսֆորմատորի, եթե չկա մուտքային u1 լարման արժեքի փոփոխության անհրաժեշտություն:
Երկկիսապարբերական տրանսֆորմատորի միջինացված կետով ուղղիչային կերպափոխիչ (նկ. 8.3):
Դրանում
օգտագործվում
է
երկու դիոդ`
VD1 և VD2, իսկ
տրանսֆորմատորն
ունի երկու
![]() երկրորդային
փաթույթներ,
որոնք ունեն
հավասար
թվով գալարներ
և միացված
են հաջորդաբար`
ստեղծելով
միջին՝
0
զրոյական
կետ: Փոփոխական
երկրորդային
փաթույթներ,
որոնք ունեն
հավասար
թվով գալարներ
և միացված
են հաջորդաբար`
ստեղծելով
միջին՝
0
զրոյական
կետ: Փոփոխական
![]() լարման
դրական
կիսապարբերության
ընթացքում
հոսանքն
անցնում
է VD1 դիոդով,
իսկ
լարման
դրական
կիսապարբերության
ընթացքում
հոսանքն
անցնում
է VD1 դիոդով,
իսկ ![]() լարման
դրական
կիսապարբերության
ընթացքում`
VD2 -ով: Արդյունքում`
մուտքային
փոփոխական
լարումը
բեռի վրա
կերպափոխվում
է ուղղված
երկկիսապարբերանի
բաբախող
լարման:
լարման
դրական
կիսապարբերության
ընթացքում`
VD2 -ով: Արդյունքում`
մուտքային
փոփոխական
լարումը
բեռի վրա
կերպափոխվում
է ուղղված
երկկիսապարբերանի
բաբախող
լարման:
Դրանում T տրանսֆորմատորի կիրառումը պարտադիր է, սակայն այն օգտագործվում է ոչ լրիվ հզորությամբ:
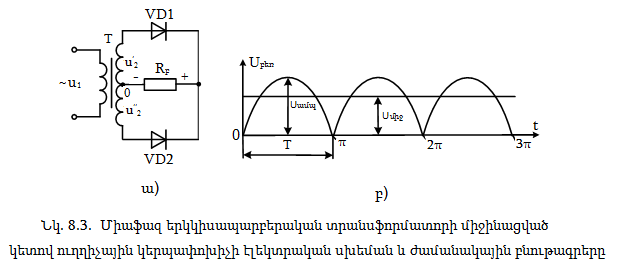
Երկկիսապարբերական կամրջակային ուղղիչային կերպափոխիչ (նկ. 8.4):
Կերպափոխիչում կիրառվում է չորս VD1…VD4 դիոդ, որոնցով ստեղծված կամրջակի մի անկյունագծում միացվում է փոփոխական u2 լարումը, իսկ մյուսում` Rբ. բեռը: Մուտքային փոփոխական լարման մի կիսապարբերության դեպքում հոսանքն անցնում է VD1-Rբ-VD3 շղթայով, իսկ մյուս կիսապարբերության դեպքում` VD2-Rբ-VD4 շղթայով: Արդյունքում մուտքային փոփոխական լարումը բեռի վրա կերպափոխվում է ուղղված երկկիսապարբերական բաբախող լարման (նկ. 8.3բ):
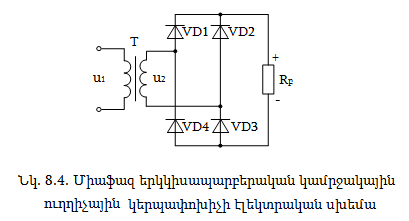
Միաֆազ ուղղիչային կերպափոխիչների սխեմաների տարրերի լարումների, հոսանքների, հզորությունների միջև կապի արտահայտությունները բերված են աղ. 8.1 -ում, որտեղ u2 -ը տրանսֆորմատորի երկրորդային փաթույթի լարման գործող արժեքն է, i2 -ը` տրանսֆորմատորի երկրորդային փաթույթի հոսանքի գործող արժեքն է, fս -ը` տրանսֆորմատորի սնման տարաբևեռ լարման հաճախականությունն է, KT -ն` տրանսֆորմատորի տրանսֆորմացիայի գործակիցն է, Pբ -ն` բեռին տրվող միջին հզորությունը:
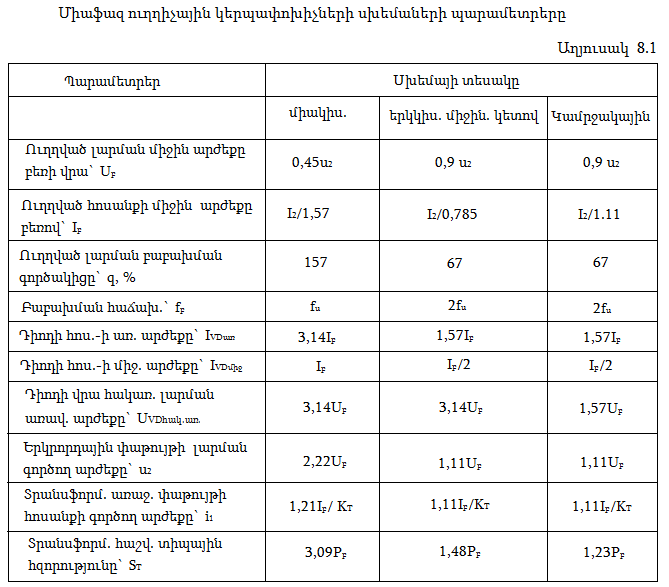
Համեմատելով երկկիսապարբերական ուղղիչային կերպափոխիչների սխեմաները` կարելի է անել հետևյալ եզրակացությունը, որ կամրջակային սխեման ունի հետևյալ առավելությունները. փոքր եզրաչափեր և կշիռ` ի հաշիվ տրանսֆորմատորի հզորության ամբողջական օգտագործման, բեռի անմիջապես միացման հնարավորություն մուտքային աղբյուրին, կրկնակի փոքր լարում տրանսֆորմատորի երկրորդային փաթույթում անհրաժեշտ ուղղված լարումը ստանալու համար, դիոդի վրա կրկնակի փոքր հակառակ լարում: Կամրջակային սխեմայի թերությունը չորս դիոդի անհրաժեշտությունն է:
8.2.2. ԵՌԱՖԱԶ ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Եռաֆազ լարման ուղղիչային սարքերի միջոցով եռաֆազ տարաբևեռ լարումը կերպափոխվում է միաբևեռ բաբախող լարման: Դիտարկենք դրանք առանձին-առանձին:
Միջին կետով եռաֆազ ուղղիչային կերպափոխիչ (նկ. 8.5):
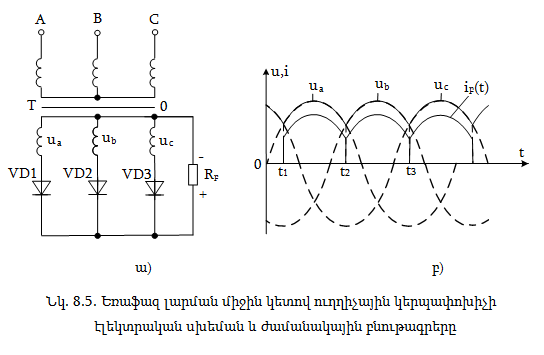
Սարքն ունի եռաֆազ T տրանսֆորմատոր, երեք VD1...VD3 դիոդ, որոնք միացված են աստղաձև: Տրանսֆորմատորի երկրորդային փաթույթները, որոնց միացված են դիոդների անոդները, կարող են միացվել միայն աստղաձև, իսկ T տրանսֆորմատորի առաջնային փաթույթները կարող են միացվել աստղաձև կամ եռանկյունաձև (նկ. 8.5ա):
Rբ բեռը միացվում է երեք դիոդների կաթոդների և տրանսֆորմատորի 0 զրոյական կետի միջև, ինչի համար էլ ստացել է համապատասխան անվանումը:
Սխեմայում դիոդները բացվում են հաջորդաբար, յուրաքանչյուրը` պարբերության 1/3 -ի ընթացքում, երբ տվյալ դիոդի անոդի պոտենցիալն ավելի դրական է, քան մյուս երկուսինը: Օրինակ` t1...t2 ժամանակահատվածում ua լարումը մեծ է ub և uc լարումներից, ինչի հետևանքով բաց է VD1 դիոդը, և հոսանքն անցնում է a ֆազի փաթույթով, VD1 -ով և Rբ բեռի դիմադրությամբ: Մյուս երկու դիոդը փակ են այս ժամանակահատվածում և հոսանք չեն անցկացնում (նկ. 8.5բ):
Հաջորդ, 1/3 պարբերության t2...t3 ժամանակահատվածում բացվում է VD2 դիոդը, և հոսանքն անցնում է b ֆազի փաթույթով, VD2 դիոդով և Rբ դիմադրությամբ, ընդ որում, բեռով անցնելիս հոսանքն ունենում է նույն ուղղությունը, ինչ նախորդ ռեժիմի ժամանակ: Դրանից հետո բացվում է VD3 դիոդը, որից հետո նորից VD1 -ը և այդպես շարունակ: Արդյունքում մուտքային եռաֆազ տարաբևեռ լարումը բեռի վրա կերպափոխվում է ուղղված բաբախող լարման, որի բաբախման հաճախականությունը մուտքային հաճախականության եռապատիկն է:
Կամրջակային եռաֆազ ուղղիչային կերպափոխիչ (նկ. 8.6):
Սրանում եռաֆազ T տրանսֆորմատորի առաջնային և երկրորդային փաթույթները կարող են միացվել աստղաձև կամ եռանկյունաձև: Սխեմայում օգտագործվող վեց դիոդից երեքը` VD1-ը, VD2-ը և VD3-ը, միացված են ընդհանուր կաթոդով, որը ելքային լարման դրական բևեռն է, իսկ մյուս երեքը` VD4-ը, VD5-ը և VD6-ը ընդհանուր անոդով, որն էլ ելքային լարման բացասական բևեռն է:
Ժամանակի յուրաքանչյուր պահին, հոսանքն անցնում է Rբ-ով և այն երկու դիոդով, որոնց վրա լարումներն ունեն առավելագույն արժեքները: Օրինակ, t1...t2 ժամանակահատվածում հոսանքն անցնում է VD1-Rբ-VD5 շղթայով, քանի որ VD1-ին և VD5-ին կիրառված գծային uab լարումը դիտարկվող ժամանակահատվածում ավելի մեծ է, քան մյուսները: Հաջորդ t2...t3 ժամանակահատվածում ավելի մեծ է uac գծային լարումը, ինչի հետևանքով հոսանքը կանցնի VD1-Rբ-VD4 շղթայով: Բացվող դիոդների հաջորդ զույգերը կլինեն VD2-ը և VD4-ը, VD2-ը և VD6-ը, և այդպես շարունակ: Ակնհայտ է, որ բոլոր դեպքերում հոսանքը բեռով անցնելիս ունի նույն ուղղությունը:
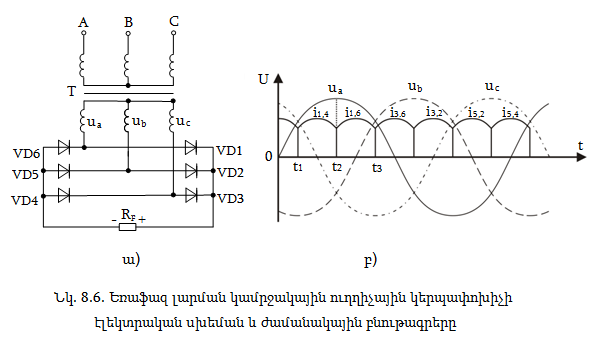
Նկ. 8.6. Եռաֆազ լարման կամրջակային ուղղիչային կերպափոխիչի էլեկտրական սխեման և ժամանակային բնութագրերը
Այդպիսով, մեկ պարբերության ընթացքում ուղղված հոսանքն անցնում է 6 տարբեր դիոդային զույգերով, ինչի հետևանքով բեռի վրայի լարման բաբախման հաճախականությունը ստացվում է մուտքային լարման հաճախականության վեցապատիկը:
Արդյունքում եռաֆազ տարաբևեռ լարումը բեռի վրա կերպափոխվում է ուղղված բաբախող լարման:
Եռաֆազ ուղղիչային սխեմաների տարրերի լարումների, հոսանքների և հզորությունների միջև առնչությունները բերված են աղ. 8.2 -ում:
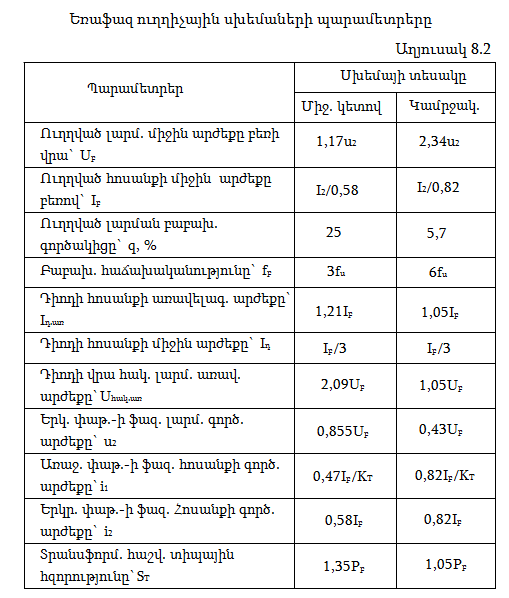
8.3. ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Կառավարվող ուղղիչային կերպափոխիչները կառուցվում են հիմնականում կառավարվող փականների հիման վրա, որոնցով հնարավոր է դառնում կարգավորել ելքային լարումը:
ՈՒղղված լարման կարգավորման հնարավոր տարբերակներից մեկը իրագործվում է ավտոտրանսֆորմատորի կիրառմամբ, որի միջոցով ուղղիչի մուտքին տրվում է կարգավորվող փոփոխական լարում ավտոտրանսֆորմատորի սողնակի դիրքի փոփոխմամբ: Խնդրի լուծման տարբերակը պարզ է, բայց ունի մի շարք թերություններ, որոնցից պետք է առանձնացնել կշռի և զանգվածի մեծացումը, ՕԳԳ -ի փոքր արժեքը, կարգավորման ցածր հուսալիությունը:
Նշված թերությունները վերացվում են կառավարվող փականների` թիրիստորների կիրառմամբ սխեմաներում, որոնք լայնորեն տարածված են այնպիսի սարքավորումների սնման համակարգերում, որոնց սնման ուղղված լարման արժեքը ենթակա է հաճախակի փոփոխման:
8.3.1. ՄԻԱԿԻՍԱՊԱՐԲԵՐԱԿԱՆ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Միակիսապարբերական կառավարվող ուղղիչի էլեկտրական սխեման բերված է նկ. 8.7 -ում, որտեղ թիրիստորը միացվում է այն ակնթարթում, երբ կառավարման էլեկտրոդին տրվում է դրական լարման իմպուլս:
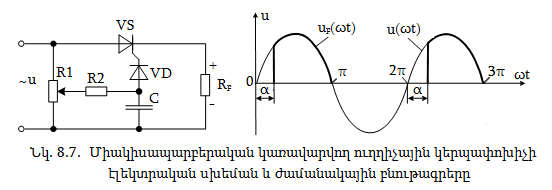
ՈՒղղված լարման կարգավորումը իրագործվում է թիրիստորի վրայի ուղիղ լարման և կառավարման իմպուլսի միջև փուլի շեղման անկյամբ, որը կոչվում է կառավարման α անկյուն: Բերված սխեմայում կառավարումն իրականացվում է փուլապտտող RC շղթայի միջոցով, որն իրագործված է R1 և R2 դիմադրությունների ու C կոնդենսատորի միջոցով:
Ներկայացված սխեման օգտագործվում է հազվադեպ, քանի որ թիրիստորի կառավարող լարումը սահուն է աճում, և թիրիստորի միացման պահը սևեռվում է ոչ ճշգրտորեն, ինչն անդրադառնում է կարգավորման որակի վրա:
8.3.2. ԵՐԿԿԻՍԱՊԱՐԲԵՐԱԿԱՆ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Երկկիսապարբերական կառավարվող ուղղիչի սխեման և նրա աշխատանքի ժամանակային բնութագրերը ակտիվ բեռի դեպքում բերված են նկ. 8.8 –ում
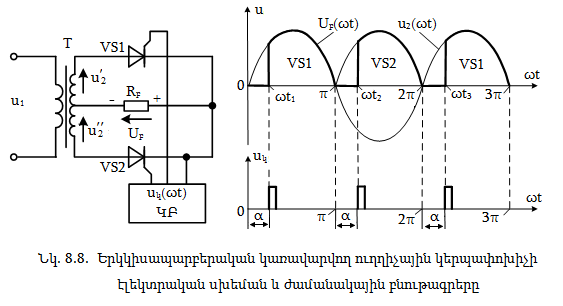
Թիրիստորների
բացման
պահերը
պայմանավորված
են կառավարման
էլեկտրոդներին
կառավարման
բլոկի
(ԿԲ)
uկ
կառավարող
ազդանշաների
տրման պահով:
Եթե կառավարող
ազդանշանները
տրվում
են ![]() պահերին,
թիրիստորները
բացվում
են համապատասխան
ուշացումով:
պահերին,
թիրիստորները
բացվում
են համապատասխան
ուշացումով:![]() ժամանակահատվածներում
թիրիստորները
փակ են,
և բեռի
վրա լարման
ակնթարթային
արժեքը
հավասար
է զրոյի:
ժամանակահատվածներում
թիրիստորները
փակ են,
և բեռի
վրա լարման
ակնթարթային
արժեքը
հավասար
է զրոյի:![]() պահին
բացվում
է VS1 թիրիստորը,
նրա վրա
լարումն
ընկնում
է մինչև
զրո
արժեքը
և մնում
այդ վիճակում
մինչև
պահին
բացվում
է VS1 թիրիստորը,
նրա վրա
լարումն
ընկնում
է մինչև
զրո
արժեքը
և մնում
այդ վիճակում
մինչև ![]() պահը:
Այն
նորից
բացվում
է
պահը:
Այն
նորից
բացվում
է
![]() պահին
և
մնում
բաց
վիճակում
մինչև
պահին
և
մնում
բաց
վիճակում
մինչև![]() պահը:
VS2
թիրիստորը
բացվում
է
պահը:
VS2
թիրիստորը
բացվում
է ![]() -ին
և մնում
այդ վիճակում
մինչ
-ին
և մնում
այդ վիճակում
մինչ ![]() պահը:
պահը:
Թիրիստորները բացվելիս բեռի լարումը կտրուկ փոխում է արժեքը և հետագայում սինուսոիդալ օրենքով փոխվելով դառնում զրո: Կառավարման α անկյան փոփոխմամբ կարգավորվում են թիրիստորների բացման պահերը, և այդպիսով հնարավոր է դառնում կարգավորել ուղղված լարման մեծությունը բեռի վրա:
Բեռի վրա ուղղված լարման միջին արժեքի և կառավարման անկյան միջև գործում է հետևյալ կապը.
![]()
որտեղ
u2m
-ը տրանսֆորմատորի
երկրորդային
լարման
ամպլիտուդային
արժեքն
է: Չկառավարվող
ռեժիմի
դեպքում
![]() և
բեռի վրա
լարումն
առավելագույնն
է, իսկ
և
բեռի վրա
լարումն
առավելագույնն
է, իսկ![]() դեպքում`
զրո:
դեպքում`
զրո:
Կառավարվող
ուղղիչի
կարգավորման
բնութագրերը
բեռի ակտիվ
բնույթի`
L
= 0 և ինդուկտիվ
բնույթի`
![]() դեպքերում
բերված
են
նկ.
8.9 -ում:
դեպքերում
բերված
են
նկ.
8.9 -ում:
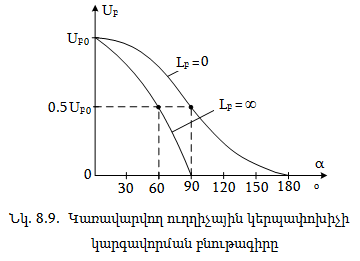
8.3.3. ԵՌԱՖԱԶ ԿԱՌԱՎԱՐՎՈՂ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Դիտարկենք կառավարվող միջին կետով եռաֆազ ուղղիչային կերպափոխիչի աշխատանքը ակտիվ բեռի դեպքում (նկ. 8.10):
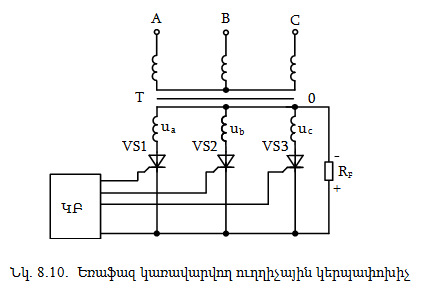
Թիրիստորների
բացման
պահը և
աշխատանքային
վիճակի
տևողությունը
պայմանավորված
են
կառավարման
![]() անկյան
մեծությամբ:
Կախված
անկյան
մեծությամբ:
Կախված
![]() անկյան
մեծությունից`
կարելի
է առանձնացնել
ուղղիչի
աշխատանքային
երկու բնորոշ
ռեժիմ.
անկյան
մեծությունից`
կարելի
է առանձնացնել
ուղղիչի
աշխատանքային
երկու բնորոշ
ռեժիմ.
1) անընդհատ հոսանքի,
2) ընդհատվող հոսանքի:
Առաջին
ռեժիմը
տեղի ունի,
երբ ![]() իսկ
երկրորդը,
երբ
իսկ
երկրորդը,
երբ ![]()
Անընդհատ հոսանքի ռեժիմի դեպքում հոսանքն ունի անընդհատ բնույթ, իսկ ուղղված լարման միջին արժեքը որոշվում է հետևյալ կերպ.
![]()
Եռաֆազ
կառավարվող
ուղղիչային
կերպափոխիչում
լարման
և հոսանքի
ժամանակային
բնութագրերը
![]() անկյան
տարբեր
արժեքների
դեպքում`
անկյան
տարբեր
արժեքների
դեպքում`![]() ընդհատ
հոսանքի
ռեժիմում
բերված
են նկ.
8.11 -ում:
ընդհատ
հոսանքի
ռեժիմում
բերված
են նկ.
8.11 -ում:
ՈՒղղված լարման միջին արժեքը որոշվում է հետևյալ կերպ.
![]()
Երբ
![]() ուղղված
լարումը
հավասար
է զրոյի:
ուղղված
լարումը
հավասար
է զրոյի:
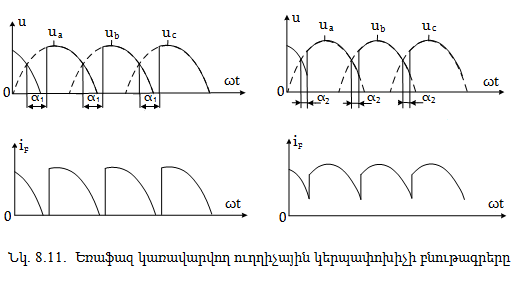
8.4. ՀԱՐԹԵՑՆՈՂ ԶՏԻՉՆԵՐ
Բեռի վրա ուղղված լարման բաբախման մեծությունը տրված նորմային հասցնելու համար ուղղիչային (ՈՒղղ) սխեմայի և բեռի միջև միացվում է հարթեցնող զտիչ (ՀԶ) (նկ. 8.12):
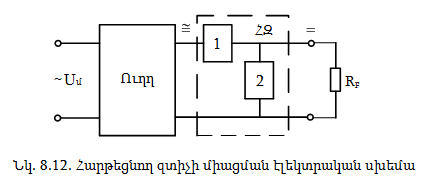
Սնման լարման բաբախումը կարող է խանգարել բեռի նորմալ աշխատանքին, որի համար էլ հարթեցնող զտիչի միջոցով փոքրացվում է լարման բաբախման մեծությունը մինչև այն մակարդակ, որի դեպքում ապահովվում է բեռի նորմալ աշխատանքը:
Հարթեցնող զտիչին ներկայացվում են հետևյալ պաhանջները. անհրաժեշտ զտման գործակցի ապահովում, նվազագույն լարման անկումներ, հզորության փոքր կորուստներ, ցածր գին և զանգվածաչափսային ցուցանիշներ, անցումային գործընթացների ժամանակ գերլարումների բացակայություն, սեփական հաճախության և հարթեցվող լարման փոփոխական բաղադրիչի հաճախության տարբերություն` ոչ ռեզոնանսային երևույթներ, բարձր հուսալիություն և այլն:
Հարթեցնող զտիչները բաժանվում են երկու խմբի` պասիվ և ակտիվ: Պասիվ հարթեցնող զտիչներում բացակայում են ուժեղացնող տարրերը և դրանք կառուցվում են պասիվ տարրերով` դիմադրություններով, կոնդենսատորներով և ինդուկտիվություններով:
Ակտիվ զտիչներում կիրառվում են ուժեղարարներ, որոնք բացառում են ինդուկտիվությունների ընդգրկումը, ապահովում են փոքր չափսեր և միաժամանակ ապահովում են հաճախությունների թողանցման շերտում ազդանշանի ուժեղացում, սակայն պահանջվում է սնման լարման աղբյուր, նվազում է սարքի հուսալիությունը և առաջանում են լրացուցիչ աղավաղումներ:
Պասիվ հարթեցնող զտիչները լինում են պարզ` պարունակելով L ինդուկտիվություն կամ C կոնդենսատոր, և բարդ` R-C, L-C, բազմահանգուցանի, ռեզոնանսային և այլն:
Նկար 8.13 –ում բերված ուղղիչային սխեմաներում կիրառված են հետևյալ միօղակ զտիչները.
ա) C ունակային,
բ) L ինդուկտիվ,
գ) R-C ակտիվ-ունակային,
դ) L-C ինդուկտիվ-ունակային,
ե) C-L-C ունակային-ինդուկտիվ-ունակային, և երկօղակ զտիչները, օրինակ,
զ) երկօղակ L-C-L-C ինդուկտիվ-ունակային:
ՈՒղղված լարման փոփոխական բաղադրիչի թուլացումը զտիչի միջոցով գնահատվում է կարևոր պարամետրերից մեկով` Sհ հարթեցման գործակցով.
![]()
որտեղ Kբ.մ -ը զտիչի մուտքի բաբախման գործակիցն է, իսկ Kբ.ելք -ը` ելքինը:
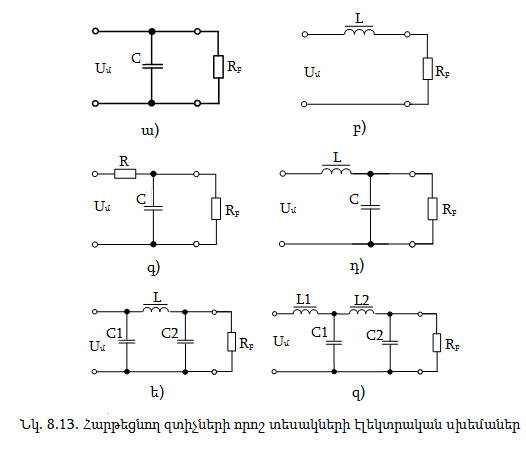
ՈՒղղված լարման բաբախման գործակիցը զտիչի մուտքում հավասար է Uմ.ամպ մուտքային լարման ամպլիտուդի և ուղղված Uմ.հաստ լարման հաստատուն բաղադրիչի հարաբերությանը`
![]()
Զտիչի ելքում ուղղված լարման բաբախման գործակիցը որոշվում է Uելք.ամպ. ելքային լարման ամպլիտուդի և ուղղված լարման Uելք.հաստ հաստատուն բաղադրիչի հարաբերությամբ`
![]()
Ունակային հարթեցնող զտիչը միացվում է բեռին զուգահեռ: Ուղղված հոսանքի փոփոխական բաղադրիչի համար CՀԶ կոնդենսատորն ունի փոքր դիմադրություն, հաստատունի համար` մեծ: ՈՒստի, որպեսզի հաստատուն բաղադրիչն առանց կորուստների անցնի Rբ բեռով, իսկ փոփոխական բաղադրիչը շունտվի, պետք է կատարվի հետևյալ պայմանը.
![]()
որտեղ w1 -ը հիմնական առաջին հարմոնիկի հաճախությունն է:
Առաջադրված Sհ հարթեցման գործակցի ապահովման համար CՀԶ ունակության մեծությունը որոշվում է հետևյալ կերպ.
![]()
ՈՒղղված լարման բաբախման մեծության նվազեցումը ունակային զտիչի կիրառմամբ` հարթեցնող զտիչի ելքային բնութագիրը բերված է նկ. 8.14 -ում: Զտիչի ունակության մեծացման դեպքում (C2>C1) ելքային լարման բնութագիրն ավելի է ուղղվում` բնութագիր 2, այսինքն` ելքային լարումն ավելի է հարթեցվում:
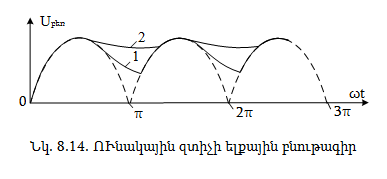
Միաֆազ մեկ կիսապարբերանի ուղղիչային սխեմայում կոնդենսատորը լիցքավորվում և լիցքաթափվում է ելքային լարման պարբերության ընթացքում, իսկ բազմաֆազային ուղղիչային սխեմայում` բաբախման հաճախականությամբ:
ՈՒնակային զտիչն արդյունավետ է բեռի ոչ մեծ հոսանքների և մեծ դիմադրության դեպքում: Նրա թերություններն են` ուղղիչներում մեծ հոսանքների առաջացումը կոնդենսատորի լիցքավորման ընթացքում և ուղղիչների վրա հակառակ լարման մեծացումը:
Ինդուկտիվ հարթեցնող զտիչը միացվում է բեռին հաջորդաբար, որն ուղղված հոսանքի փոփոխական բաղադրիչի համար պետք է հանդիսանա մեծ դիմադրություն: Ինդուկտիվ դիմադրությունը պետք է գերազանցի բեռի ակտիվ դիմադրությանը, այսինքն` անհրաժեշտ է, որ կատարվի հետևյալ պայմանը`
![]()
LՀԶ ինդուկտիվության մեծությունը, որն անհրաժեշտ է առաջադրված Kհ հարթեցման գործակցի ապահովման համար, որոշվում է հետևյալ կերպ.
![]()
LC զտիչը հարմար է կիրառել բեռի մեծ հոսանքների դեպքում և առաջադրված հարթեցման գործակցի ապահովման համար արժեքը պետք է որոշվի հետևյալ կերպ.
![]()
Ինդուկտիվ զտիչի աշխատանքի սկզբունքն այն է, որ այն ցուցաբերում է մեծ դիմադրություն` ուղղված հոսանքի փոփոխական բաղադրիչին, ինչի հետևանքով այդ բաղադրիչն առանձնացվում է ինդուկտիվ դիմադրության վրա, իսկ բեռի վրա այն դառնում է աննշան: Պարապ ռեժիմի ընթացքում այդ զտիչը հարթեցում չի կատարում: Այդ զտիչի առավելություններն են` պարզությունը, հզորության նվազագույն կորուստները, իսկ հիմնական թերությունը. հարթեցման անհավասարությունն է բեռի դիմադրության փոփոխման ժամանակ: Այն նպատակահարմար է կիրառել բեռի փոքր դիմադրության դեպքում:
ՈՒղղված հոսանքի փոքր արժեքի դեպքում հաճախ օգտագործվում է RC զտիչ, որի առավելություններն են` ոչ մեծ եզրաչափերը, կշիռը և ինքնարժեքը, իսկ հիմնական թերություններն են` RՀԶ -ի վրա լարման անկումը և հզորության կորուստը: Խորհուրդ է տրվում RՀԶ -ի արժեքը ընտրել (0,2…0,4)Rբ միջակայքից:
Միաէլեմենտ զտիչների հիմնական թերությունն այն է, որ ունեն հարթեցման փոքր արդյունավետություն ինդուկտիվության և ունակության մեծ արժեքների դեպքում: Հարթեցման մեծ արդյունավետություն ստանալու համար օգտագործում են բազմօղակ զտիչներ, որոնք առանձին զտիչների (օղակների) հաջորդական միացումն են: Բազմօղակ զտիչի հարթեցման գործակիցը որոշվում է առանձին n հատ զտիչների հարթեցման գործակիցների արտադրյալով`
![]()
Բարձր հարթեցման գործակից ունեն ռեզոնանսային զտիչները, որոնք կիրառվում են միաֆազ շղթաներում ցանցի հաճախականության կայունության դեպքում (նկ. 8.15):
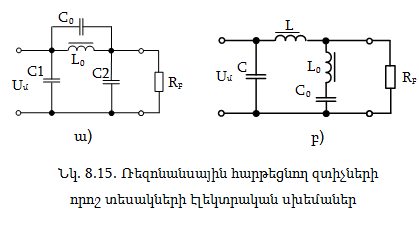
Նկար 8.15ա -ում ռեզոնանսային հարթեցնող զտիչը զուգահեռ կոնտուրով է, և ռեզոնանսը ըստ հոսանքի է, որտեղ ռեզոնանսային հաճախության հոսանքի հանդեպ L0C0 տարրերով կոնտուրն ունի մեծ դիմադրություն: Նկար 8.15բ -ում հարթեցնող զտիչը հաջորդական կոնտուրով է, և ռեզոնանսը ըստ լարման է, իսկ L0C0 կոնտուրն ունի ռեզոնանսային հաճախության հոսանքի հանդեպ փոքր դիմադրություն:
Այդ հարթեցնող զտիչների հիմնական թերությունն այն է, որ զգայուն են սնման լարման հաճախության փոփոխման նկատմամբ և հարթեցման գործակցի արժեքը բարձր հարմոնիկաների համար ավելի փոքր է, քան հիմնական հարմոնիկի:
Էլեկտրոնային էլեմենտների զարգացման շնորհիվ պասիվ հարթեցնող զտիչները փոխարինվում են ակտիվ զտիչներով, որոնցում ուժեղարարների կիրառմամբ լավագույն պարամետրերով լուծվում են հարթեցման և զտման խնդիրները:
Ակտիվ հարթեցնող զտիչները հիմնականում իրագործվում են տրանզիստորների բազայի վրա և արագ են արձագանքում մուտքային լարմանը: Ըստ իրենց գործողության` սրանք նման են R-C, և L-C զտիչներին, բայց ունեն մի շարք առավելություններ. փոքր եզրաչափեր, հարթեցման մեծ գործակից, հարթեցման գործակցի անկախություն բեռի հոսանքից, իսկ հիմնական թերությունն այն է, որ շրջապատի ջերմաստիճանի փոփոխությունը խիստ է ազդում տրանզիստորի աշխատանքի վրա:
Տրանզիստորային հարթեցնող զտիչների աշխատանքի սկզբունքը հիմնված է այն բանի վրա, որ տրանզիստորի դիմադրությունը փոփոխվող հոսանքի նկատմամբ շատ անգամ մեծ է, քան հաստատուն հոսանքի նկատմամբ:
Ակտիվ հարթեցնող զտիչներն ըստ բեռի միացման ձևի բաժանվում են հետևյալ խմբերի. բեռի հաջորդական միացմամբ` կոլեկտորային շղթաներում կամ էմիտերային շղթաներում, բեռի և տրանզիստորի զուգահեռ միացմամբ:
Ըստ շեղման սկզբունքի, ակտիվ հարթեցնող զտիչները լինում են սևեռված (նկ. 8.16ա) և ինքնաշխատ շեղմամբ` (նկ. 8.16բ):
Սևեռված շեղման դեպքում ելքային լարումը փոխվում է ջերմաստիճանի և բեռի հոսանքի փոփոխման դեպքում, իսկ ավտոմատի դեպքում` այդ ազդեցությունները հավասարակշռվում են, սակայն վերջիններն ունեն ավելի փոքր հարթեցման գործակից: Այդ սխեմաներում C2 կոնդենսատորը լրացուցիչ զտիչ է, որը միացվում է տրանզիստորային զտիչի ելքին:
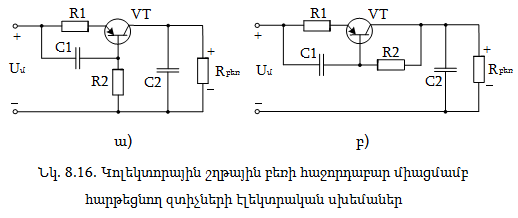
Էմիտերային հարթեցնող զտիչներն ունեն առավելություններ կոլեկտորայինների նկատմամբ (նկ. 8.17), որտեղ ա) -ն հանդիսանում է միաօղակ R-C զտիչ, իսկ բ)-ն` երկօղակ R-C զտիչ:
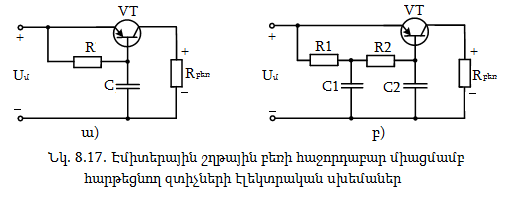
Այդ զտիչները կոլեկտորայինների համեմատ ունեն 1 Օմ -ից փոքր մուտքային դիմադրություն. բացակայում է C2 զտիչը, իսկ էմիտերին հաջորդաբար միացված R1 դիմադրության բացակայությունը տալիս է ՕԳԳ -ի մեծացում:
Բեռին զուգահեռ միացմամբ հարթեցնող զտիչների սխեմաները կիրառվում են փոքր Rբ -ի դեպքում, փոքր լարումների և մեծ հոսանքների դեպքերում: Այդտեղ VT տրանզիստորը համարժեք է C կոնդենսատորին R-C զտիչում: Այդ զտիչներն ունեն մեծ կիրառություն և ունեն այն առավելությունը, որ բնութագրերը ջերմաստիճանի տատանումների նկատմամբ պակաս զգայուն են (նկ. 8.18):
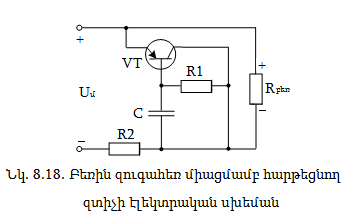
Կազմածու տրանզիստորների բազայի վրա կառուցվող զտիչներն առանձնանում են հարթեցման բարձր գործակցով:
8.5. ԼԱՐՄԱՆ ԲԱԶՄԱՊԱՏԿՄԱՄԲ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ
Բեռի վրա անհրաժեշտ մեծության ուղղված լարում ստանալու համար, առանց բարձրացնող տրանսֆորմատորի օգտագործման, կիրառվում են լարման բազմապատկմամբ ուղղիչային կերպափոխիչներ: Այդ սարքերի միջոցով տարաբևեռ լարումը կերպափոխվում է հաստատուն լարման միաժամանակ 2, 3, 4, և այլ անգամներ բազմապատկելով մուտքային լարման մեծությունը:
Բազմապատկման 2 գործակցով սիմետրիկ երկկիսապարբերային ուղղիչային կերպափոխիչի սխեման և լարումների ժամանակային բնութագրերը բերված են նկ. 8.19 -ում, որտեղ երկու միակիսապարբերանի ուղղիչներ միացված են հաջորդաբար և աշխատում են մեկ ընդհանուր բեռի համար:
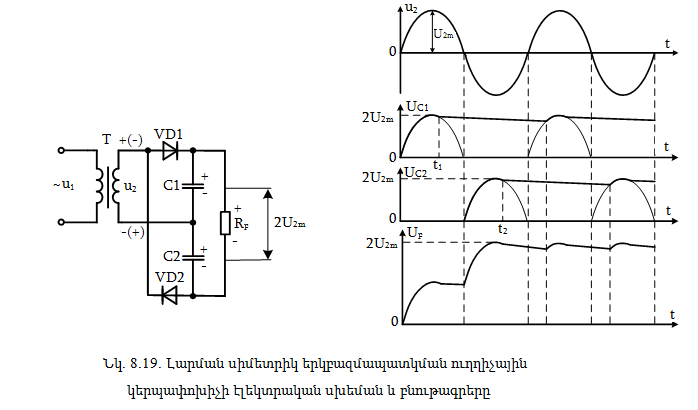
Կերպափոխիչի
մուտքային
u2 լարման
դրական
կիսապարբերության
սկզբում
(լարման
բևեռականությունը
ցույց
է
տրված
առանց
փակագծերի)
VD1
դիոդը
բաց
է,
իսկ
VD2 -ը` փակ:
Բաց
VD1 -ով լիցքավորվում
է
C1 կոնդենսատորը
մինչև
u2 լարման
ամպլիտուդային
U2m
արժեքը`
![]() Ժամանակի
t1 պահից
հետո
մուտքային
լարումը
դառնում
է
փոքր
C1 կոնդենսատորի
լարումից,
VD1 դիոդը փակվում
է,
իսկ
C1 կոնդենսատորը
սկսում
է
լիցքաթափվել
Rբ -ի
միջոցով:
Ժամանակի
t1 պահից
հետո
մուտքային
լարումը
դառնում
է
փոքր
C1 կոնդենսատորի
լարումից,
VD1 դիոդը փակվում
է,
իսկ
C1 կոնդենսատորը
սկսում
է
լիցքաթափվել
Rբ -ի
միջոցով:
Մուտքային
u2 լարման
բացասական
կիսապարբերության
սկզբում
(լարման
բևեռականությունը
ցույց
է
տրված
փակագծերով)
բացվում
է
VD2 դիոդը, իսկ
VD1 -ը շարունակում
է
մնալ
փակ:
Բաց
VD2 -ով լիցքավորվում
է
C2 կոնդենսատորը
նույնպես
մինչև
U2m արժեքը`
![]() Ժամանակի
t2 պահից
հետո
մուտքային
լարումը
դառնում
է
փոքր
C2 կոնդենսատորի
լարումից,
VD2 դիոդը փակվում
է
և
C2 կոնդենսատորը
սկսում
է
լիցքաթափվել
Rբ -ի
միջոցով:
C1 և C2 կոնդենսատորների
արժեքներն
ընտրվում
են
այնպիսիք,
որ
դրանց
լիցքաթափման
ժամանակի
հաստատունը
լինի
հնարավորինս
մեծ,
որի
դեպքում
լարումը
բեռի
վրա
հավասարվում
է
կոնդենսատորների
վրա
լարումների
գումարին,
այսինքն`
Ժամանակի
t2 պահից
հետո
մուտքային
լարումը
դառնում
է
փոքր
C2 կոնդենսատորի
լարումից,
VD2 դիոդը փակվում
է
և
C2 կոնդենսատորը
սկսում
է
լիցքաթափվել
Rբ -ի
միջոցով:
C1 և C2 կոնդենսատորների
արժեքներն
ընտրվում
են
այնպիսիք,
որ
դրանց
լիցքաթափման
ժամանակի
հաստատունը
լինի
հնարավորինս
մեծ,
որի
դեպքում
լարումը
բեռի
վրա
հավասարվում
է
կոնդենսատորների
վրա
լարումների
գումարին,
այսինքն`
![]()
Բեռի վրա լարման բաբախումները փոքրացնելու համար պետք է մեծացնել C1 և C2 կոնդենսատորների ունակությունները, ինչպես նաև` բեռի Rբ դիմադրությունը:
Լարման ոչ սիմետրիկ կրկնապատկման և եռապատկման երկկիսապարբերային ուղղիչային կերպափոխիչների սխեմաները բերված են նկ. 8.20 -ում:
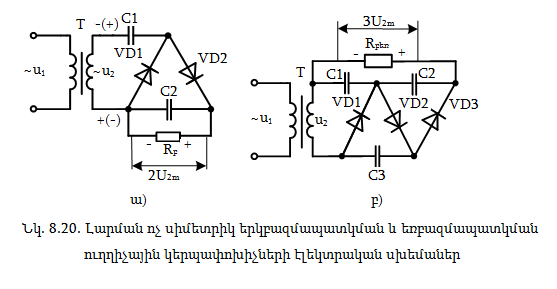
Դիտարկենք
լարման
կրկնապատկման
ուղղիչային
կերպափոխիչի
աշխատանքը
(նկ.
8.20ա):
Մուտքային
u2
լարման
բացասական
կիսապարբերության
ընթացքում
(բևեռականությունը
ցույց
է
տրված
առանց
փակագծերի)
VD1
դիոդը
բաց
է,
իսկ
VD2 -ը` փակ:
Բաց
VD1
-ով լիցքավորվում
է
C1 կոնդենսատորը
մինչև
U2m
արժեքը`
![]() Մուտքային
u2
լարման
դրական
կիսապարբերության
ընթացքում
բաց
է
VD2
դիոդը,
և
C1
կոնդենսատորի
ու
տրանսֆորմատորի
երկրորդային
փաթույթի
գումարային
լարումը
կիրառվում
է
C2
կոնդենսատորին
և
բեռին:
Բաց
VD2
-ով C2 կոնդենսատորը
լիցքավորվում
է
մինչև
տրանսֆորմատորի
երկրորդային
փաթույթի
u2
լարման
կրկնակի
ամպլիտուդային
արժեքը`
Մուտքային
u2
լարման
դրական
կիսապարբերության
ընթացքում
բաց
է
VD2
դիոդը,
և
C1
կոնդենսատորի
ու
տրանսֆորմատորի
երկրորդային
փաթույթի
գումարային
լարումը
կիրառվում
է
C2
կոնդենսատորին
և
բեռին:
Բաց
VD2
-ով C2 կոնդենսատորը
լիցքավորվում
է
մինչև
տրանսֆորմատորի
երկրորդային
փաթույթի
u2
լարման
կրկնակի
ամպլիտուդային
արժեքը`![]() Հաջորդ
կիսապարբերությունում,
երբ
փակվում
է
VD2
-ը, C2 -ը
լիցքաթափվում
է
Rբ
-ով, իսկ
C1
կոնդենսատորը
վերալիցքավորվում
է
մինչև
U2m
ամպլիտուդային
արժեքը:
Հաջորդ
կիսապարբերությունում,
երբ
փակվում
է
VD2
-ը, C2 -ը
լիցքաթափվում
է
Rբ
-ով, իսկ
C1
կոնդենսատորը
վերալիցքավորվում
է
մինչև
U2m
ամպլիտուդային
արժեքը:
Ոչ սիմետրիկ երկբազմապատկման սխեման կարող է հիմք հանդիսանալ լարման N անգամ բազմապատկմամբ ուղղիչային կերպափոխիչի սխեմայի կառուցման համար, մասնավորապես նկ. 8.20բ -ում բերված է երեք անգամ լարման բազմապատկման ուղղիչային կերպափոխիչի սխեման:
8.6. ՀԱՍՏԱՏՈՒՆ ՀՈՍԱՆՔԸ ՓՈՓՈԽԱԿԱՆԻ ԿԵՐՊԱՓՈԽՈՂ
ԿԵՐՊԱՓՈԽԻՉՆԵՐ (ԻՆՎԵՐՏՈՐՆԵՐ)
Այն սարքերը, որոնք հաստատուն լարումը կերպափոխում են փոփոխականի, կոչվում են ինվերտորներ, իսկ գործընթացը` ինվերտացում: Ինվերտորի ելքին միացվում է փոփոխական լարման բեռը: Կերպափոխիչի կազմում գործող էլեկտրոնային տարրերն աշխատում են բանալիային ռեժիմում, որոնց պարբերաբար բացման և փակման գործընթացները իրականացվում են կառավարող սխեմայի կողմից:
Համաձայն կիրառվող էլեկտրոնային տարրերի` ինվերտորները լինում են տրանզիստորային և թիրիստորային: Ըստ կերպափոխող բլոկի և կառավարող համակարգի փոխհարաբերության տարբերվում են արտաքին գրգռումով և ինքնագրգռումով ինվերտորներ: Արտաքին գրգռումով ինվերտորի կառավարող համակարգի կազմի մեջ մտնում է իմպուլսների, կամ հարմոնիկ տատանումների ավտոնոմ գեներատորը, որը ստեղծում է կառավարող ազդանշաններ: Ինքնագրգռումով ինվերտորում այդպիսի գեներատորը կառավարող համակարգից բացակայում է, իսկ էլեկտրոնային տարրերի կոմուտացումն իրականացվում է ի հաշիվ դրական հետադարձ կապի, որը ստեղծվում է հենց կերպափոխիչում:
Ինվերտորները դասակարգվում են ըստ աշխատանքի սկզբունքի (միատակտ, երկտակտ), փոփոխական լարման ֆազերի քանակի (միաֆազ, եռաֆազ և այլն), լարման ձևի (սինուսոիդային, ուղղանկյունաձև և այլն), կերպափոխիչի սխեմայի տիպի, կառավարման համակարգի, ելքային լարման և հաճախականության կայունացման և կառավարման, ինչպես նաև մի շարք այլ հատկանիշներով:
8.6.1. ՄԻԱՏԱԿՏ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
Դիտարկենք միատակտ արտաքին գրգռումով տրանզիստորային ինվերտորների պարզ էլեկտրական սխեմաները, որոնցում կառավարման ազդանշանները ուղղանկյունաձև են, և տրանզիստորներն աշխատում են բանալիային ռեժիմով:
Տրանզիստորի և մուտքային լարման աղբյուրի հաջորդաբար միացմամբ սխեմայում` նկ. 8.21ա կառավարող լարման բացասական բևեռականության դեպքում VT տրանզիստորը բաց է, նրա էմիտեր-կոլեկտոր տեղամասի դիմադրությունը շատ փոքր է, և մուտքային հաստատուն լարումը տրվում է բեռին: Այդ ռեժիմում հոսանքը մուտքային լարման աղբյուրից բաց տրանզիստորով անցնում է Rբ բեռով և L ինդուկտիվությամբ (դրոսել), և այդ ընթացքում L -ում կուտակվում է էներգիա: Երբ տրանզիստորը փակվում է, L -ում կուտակված էներգիան մարվում է Rբ-ով` ստեղծելով նրանում հակառակ ուղղությամբ հոսանք: Այդ հոսանքը փոքրանում է էքսպոնենցիալ օրենքով` բերելով բեռի վրա լարման նվազում: Արդյունքում ստանում ենք Rբ -ով անցնող հոսանքի տարբեր ուղղություններ: Եթե L -ի ինդուկտիվությունը շատ մեծ լինի, ապա R -ի վրայի լարման տեսքը մոտ կլինի երկպարբերանի ուղղանկյունաձև լարմանը (նկ. 8.22):
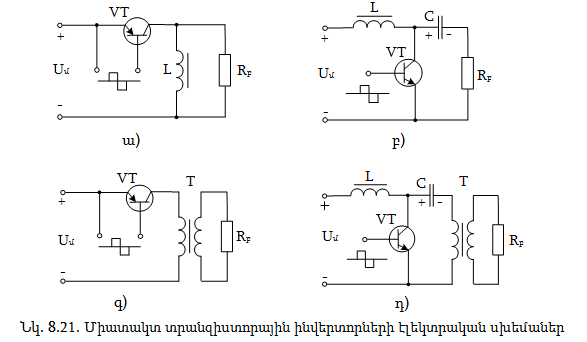
Այդ սխեմայի թերությունն այն է, որ մուտքային հաստատուն հոսանքի աղբյուրը ժամանակի ընթացքում հավասարաչափ չի բեռնվում, այսինքն` աղբյուրի հոսանքն ունի իմպուլսային բնույթ, քանի որ բաց տրանզիստորի դեպքում մուտքային լարման աղբյուրի iա հոսանքը հավասար է iբ բեռի և iL ինդուկտիվ հոսանքների գումարին, իսկ փակ տրանզիստորի դեպքում` դառնում է զրո:
Այն թերությունը, որ նշվեց առաջին սխեմայի համար, վերացվում է երկրորդում, որտեղ մուտքային հաստատուն հոսանքի աղբյուրը, տրանզիստորը և բեռը միացված են զուգահեռ (նկ. 8.21բ.): Կառավարող լարման բացասական կիսապարբերության ժամանակ տրանզիստորը փակ է, C կոնդենսատորը լիցքավորվում է (բևեռականությունը ցույց է տրված նկարում), որի ընթացքում սնման աղբյուրի հոսանքն անցնում է L -ով, C -ով և Rբ -ով, այսինքն iC = iL = iբ: Երբ տրանզիստորը բացվում է, կառավարող լարման դրական կիսապարբերության ժամանակ, աղբյուրից հոսանքն անցնում է L -ով և VT -ով, և այդ ժամանակահատվածում C -ն լիցքաթափվում է` VT-Rբ շղթայով` ստեղծելով Rբ -ով հակառակ ուղղությամբ հոսանք: Արդյունքում բեռով անցնում է երկկիսապարբերանի հոսանք: Այդ սխեմայի ելքային փոփոխական լարումն ունի ուղղանկյունաձևին մոտ տեսք: Հոսանքների և լարումների ժամանակային դիագրամները բերված են նկ. 8.23 –ում:
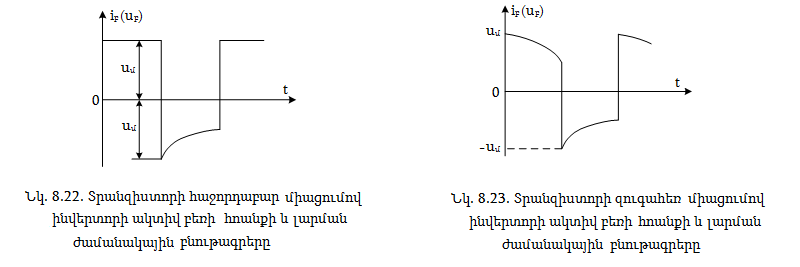
Սխեմայում սնման աղբյուրի հոսանքն ունի անընդհատ բնույթ և դրա անընդհատությունն էլ ավելի բարելավելու համար հաջորդաբար միացված է L դրոսելը: ՈՒսումնասիրված զուգահեռ սխեմայում, ելքային լարման ձևը կարելի է փոփոխել մեծ սահմաններում` փոփոխելով L -ի և C -ի մեծությունները:
Եթե պետք է բեռի վրայի փոփոխական լարումը մեծացնել կամ փոքրացնել մինչև պահանջվող արժեքը, ապա պետք է օգտագործել համապատասխան տրանսֆորմատոր, որը պետք է միացնել բեռի և ինվերտորի միջև (նկ. 8.22գ, դ):
8.6.2. ԵՐԿՏԱԿՏ ՏՐԱՆԶԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
Երկտակտ ինվերտորների տարբեր էլեկտրական սխեմաներ, որոնցում տրանզիստորներն աշխատում են բանալիային ռեժիմով, բերված են նկ. 8.24 -ում:
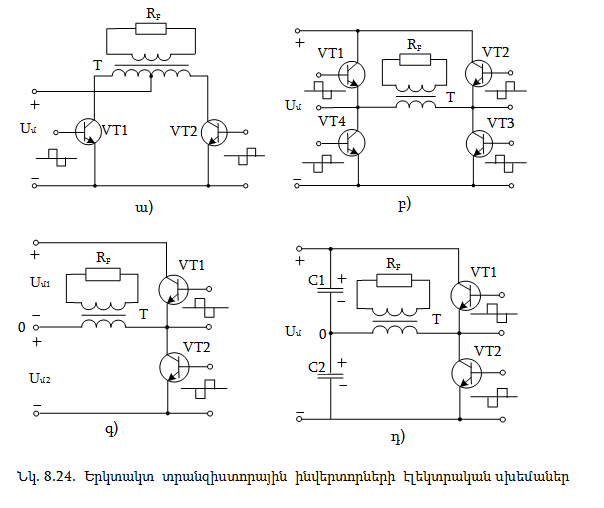
Նկար 8.24ա -ում պատկերված է դիֆերենցված տրանսֆորմատորով երկտակտ տրանզիստորային ինվերտորի սխեման, որտեղ VT1 և VT2 տրանզիստորները բացվում են հաջորդաբար` երբ բաց է VT1 տրանզիստորը, փակ է VT2 -ը, և հակառակը: Այդպիսի ռեժիմ ապահովվում են տրանզիստորները` կառավարելով հակափուլ ուղղանկյունաձև լարումներով: Մուտքային լարման աղբյուրի հաստատուն լարումը փոխարինաբար տրվում է տրանսֆորմատորի առաջնային փաթույթի մեկ աջ, մեկ ձախ կեսին` ստեղծելով բեռի վրա ուղղանկյունաձև փոփոխական լարում:
Երբ բաց է VT1 տրանզիստորը, իսկ VT2 -ը` փակ, մուտքային աղբյուրից հոսանքն անցնում է տրանսֆորմատ որի առաջնային ձախ կիսափաթույթով` աջից ձախ ուղղությամբ, իսկ երբ փակվում է VT1 -ը և բացվում է VT2 -ը, սնման աղբյուրից հոսանքն անցնում է տրանսֆորմատորի առաջնային աջ կիսափաթույթով` ձախից աջ ուղղությամբ: Տրանսֆորմատորի առաջնային փաթույթում հոսանքն ունենում է տարբեր ուղղություններ, ինչի արդյունքում բեռի վրա ձևավորվում է փոփոխական լարում:
Սխեմայի թերություններն են. պարտադիր միջինացված կետով տրանսֆորմատորի կիրառությունը և տրանսֆորմատորի հզորության ոչ ամբողջական օգտագործումը, իսկ առավելությունը` բեռի և ինվերտորի միջև գալվանական կապի խզումը և երկու էլեկտրոնային բանալիների կիրառումը:
Նկար 8.24բ -ում պատկերված կամրջակային ինվերտորի սխեմայում միաժամանակ լինում են բաց VT1 և VT3 տրանզիստորները կամ VT2 և VT4 տրանզիստորները: Երբ բաց են VT1 և VT3 տրանզիստորները, հոսանքը մուտքային աղբյուրից անցնում է VT1 -ով, T տրանսֆորմատորի, առաջնային փաթույթով` ձախից աջ և VT3 -ով: Երբ բաց են VT2 -ը և VT4 –ը, հոսանքն անցնում է VT2 -ով, T տրանսֆորմատորի առաջնային փաթույթով` աջից ձախ և VT4 -ով: Արդյունքում տրանսֆորմատորի առաջնային փաթույթի վրա տեղի է ունենում լարման բևեռականության փոփոխություն, առաջնային փաթույթում ստացվում են հոսանքի տարբեր ուղղություններ, հետևաբար բեռի վրա` փոփոխական լարում: Արդյունքում բեռի վրա լարումն ունենում է ուղղանկյունաձև տեսք:
Այդ սխեմայի թերությունն է. չորս տրանզիստորների անհրաժեշտությունը, իսկ առավելությունները` բեռը կարելի է միացնել առանց տրանսֆորմատորի` անմիջապես ինվերտորին (տրանսֆորմատորի առաջնային փաթույթի տեղը), իսկ տրանսֆորմատորի դեպքում այն օգտագործվում է առավելագույն հզորությամբ:
Նկար 8.24գ -ում ներկայացված է կիսակամրջակային, երկու մուտքային աղբյուրով ինվերտորի սխեման, որոնց հաջորդական միացմամբ ձևավորվում է 0 զրոյական կետ: Տրանզիստորները բացվում են հերթականությամբ: Երբ բացվում է VT1 տրանզիստորը, Uմ1 մուտքային աղբյուրից հոսանքն անցնում է VT1 -ով, տրանսֆորմատորի առաջնային փաթույթով` աջից ձախ, իսկ երբ փակվում VT1 -ը, ապա բացվում է VT2 –ը, և հոսանքը Uմ2 մուտքային լարման աղբյուրից անցնում է տրանսֆորմատորի առաջնային փաթույթով ձախից աջ և VT2 -ով:
Այս սխեմայի առավելությունը երկու տրանզիստորների առկայությունն է, իսկ թերությունը` երկու մուտքային լարման աղբյուրների անհրաժեշտությունը:
Վերջին թերությունը բացակայում է երկտակտ կիսակամրջակային մեկ մուտքային լարման աղբյուրով տարբերակում, որտեղ C1 և C2 կոնդենսատորներով կատարվում է լարման բաժանում և 0 զրոյական կետի ձևավորվում (նկ. 8.24դ): Այդ տարբերակի թերությունն է. բեռի վրա լարման ամպլիտուդը փոքրանում է երկու անգամ:
ՈՒսումնասիրված սխեմաներում տրանզիստորների կառավարման ազդանշանները ստեղծվում են անկախ սարքավորումներով` ուղղանկյուն իմպուլսների գեներատորով, այսինքն` այդ կերպափոխիչները արտաքին գրգռումով ինվերտորներ են:
Բերված սխեմաները ստեղծում են միաֆազ փոփոխական լարում: Ապահովելով անհրաժեշտ կառավարում երեք միատեսակ սխեմաների կիրառման դեպքում, կարելի է ստեղծել եռաֆազ լարման ինվերտորներ:
8.6.3. ԹԻՐԻՍՏՈՐԱՅԻՆ ԻՆՎԵՐՏՈՐՆԵՐ
Ինվերտորների սխեմաներում, որպես կառավարվող էլեկտրոնային տարրեր, լայն կիրառում ունեն թիրիստորները:
Դիտարկենք լայն տարածում ունեցող երկտակտ թիրիստորային ինվերտորի սխեման, որը բերված է նկ. 8.25 -ում:
Սխեմայում VS1 և VS2 թիրիստորները հաջորդաբար բացվում են լարման դրական իմպուլսներից, որոնք ստեղծում են կառավարման իմպուլսների գեներատորը: Թիրիստորների փակումն իրականացվում է անոդներին միացված կոմուտացնող Cկ կոնդենսատորի միջոցով` թիրիստորներից մեկի բացման ժամանակ ապահովվում է մյուսի փակումը` ստեղծելով նրա անոդ-կաթոդ էլեկտրոդների վրա հակառակ լարում: L դրոսելն ապահովում է մուտքային լարման աղբյուրի հոսանքի անընդհատությունը թիրիստորների կոմուտացիաների ժամանակ: Դրոսելի մեծ ինդուկտիվության ժամանակ լարման աղբյուրի հոսանքը կարելի է համարել հաստատուն:
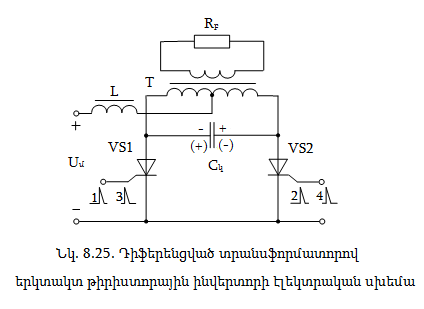
Դիտարկենք աշխատանքի սկզբունքը. ընդունենք ժամանակի t1 պահին VS1 թիրիստորի կառավարման էլեկտրոդին տրվում է լարման 1 դրական իմպուլս: VS1 թիրիստորի բացվելով` հոսանքը լարման դրական բևեռից անցնում է T տրանսֆորմատորի առաջնային փաթույթի ձախ մասով` աջից ձախ և VS1 թիրիստորով: Cկ կոնդենսատորը լիցքավորվում է, որի բևեռականությունը նկարում ցույց է տրված առանց փակագծերի: Հաջորդ փուլում VS2 թիրիստորի կառավարման էլեկտրոդին տրվում է բացման լարման 2 իմպուլսը` ժամանակի t2 պահ, որի ազդեցությամբ այն սկսում է բացվել և Cկ կոնդենսատորի լարումը տրվում է VS1 -ին, որը տիրիստորի համար հակառակ է (նկ. 8.26): Կոնդենսատորը լիցքաթափվելով VS2-VS1 շղթայով ստեղծում է VS1 -ի համար հակառակ հոսանք: Փակվում է VS1 –ը, և ամբողջությամբ բացվում է VS2 -ը: Հոսանքը սնման լարման դրական բևեռից անցնում է T տրանսֆորմատորի առաջնային փաթույթի աջ մասով` ձախից աջ և VS2 -ով: Կոնդենսատորը վերալիցքավորվում է հակառակ բևեռականությամբ (բևեռականությունը նկարում ցույց է տրված փակագծերով):
Թիրիստորների կոմուտացիայի գործընթացը պարբերաբար կրկնվում է, հոսանքը T տրանսֆորմատորի առաջնային փաթույթով ունենում է տարբեր ուղղություններ, որի արդյունքում բեռի վրա ձևավորվում է փոփոխական լարում: Թիրիստորների կառավարման իմպուլսների և բեռի հոսանքի ու լարման փոխկապակցվածությունը ցույց է տրված նկ. 8.26 –ում:
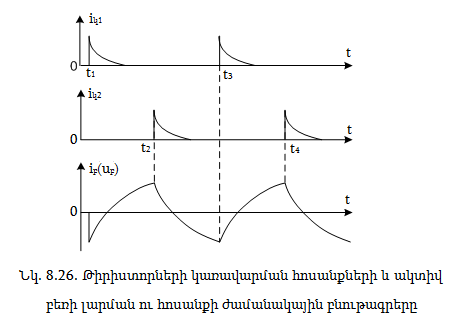
Կոմուտացիոն կոնդենսատորի ունակության արժեքը որոշվում է հետևյալ արտահայտությամբ`
![]()
որտեղ IVS -ը թիրիստորով անցնող հոսանքի արժեքն է, tանջ -ը` թիրիստորի անջատման ժամանակի մեծությունն է, UC -ն` կոնդենսատորի վրայի լարումն է` UC≈Uսն, K -ն` գործակից է, որով գնահատվում է բեռի բնույթը` K=1...1,4 (K -ի փոքր արժեքը համապատասխանում է ակտիվ-ինդուկտիվ բեռին, իսկ մեծ արժեքը` ակտիվ բեռին):
ՈՒսումնասիրված սխեման անվանում են զուգահեռ ինվերտոր, քանի որ նրանում կոմուտացնող Cկ կոնդենսատորը բեռին միացված է զուգահեռ` T տրանսֆորմատորի միջոցով:
Մեկ այլ զուգահեռ, երկտակտ ինվերտորի օրինակ է նկ. 8.27 -ում բերված սխեման: Այդ սխեմայում թիրիստորներն աշխատում են զույգ առ զույգ:
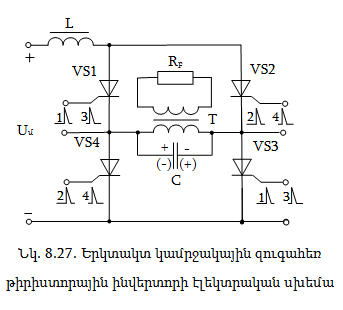
Միաժամանակ տրվող կառավարման իմպուլսներից բացվում են VS1 և VS3 թիրիստորները, և հոսանքը լարման դրական բևեռից անցնում է VS1 -ով, T տրանսֆորմատորի առաջնային փաթույթով` ձախից աջ և VS3 -ով: Cկ կոնդենսատորը լիցքավորվում է, որի բևեռականությունը նկարում ցույց է տրված առանց փակագծերի: Հաջորդ փուլում կառավարման իմպուլսները միաժամանակ տրվում են VS2 և VS4 թիրիստորներին, և դրանց բացման ընթացքում կոնդենսատորը լիցքաթափվում է` ստեղծելով հակառակ հոսանք VS1 և VS3 թիրիստորների համար: Փակվում են VS1 -ը և VS3 -ը, և բացվում` VS2 -ը և VS4 -ը: Հոսանքը լարման դրական բևեռից անցնում է VS2 -ով, T տրանսֆորմատորի առաջնային փաթույթով` աջից ձախ և VS4 -ով: Կոնդենսատորը վերալիցքավորվում է հակառակ բևեռականությամբ (բևեռականությունը նկարում ցույց է տրված փակագծերով): Հաջորդ փուլում երևույթները կրկնվում են և արդյունքում տրանսֆորմատորի առաջնային փաթույթով հոսանքն ունենում է տարբեր ուղղություններ և բեռի վրա ձևավորվում է փոփոխական լարում: Տրանսֆորմատորի կիրառման դեպքում ստեղծվում է գալվանական խզում մուտքի և բեռի շղթաների միջև, և մյուս կողմից կարելի է իրականացնել բեռի վրայի լարման ինչպես բարձրացում, այնպես էլ ցածրացում:
Կոմուտացիոն կոնդենսատորի ունակության արժեքը երկու անգամ պետք է գերազանցի նախորդ սխեմայի կոնդենսատորի արժեքը` Cհաշ≥2KIբtանջ/UC, քանի որ միաժամանակ փակվելու են երկու թիրիստոր:
Կամրջակային սխեմայի առավելություններն են` տրանսֆորմատորի սկզբունքորեն բացակայում, որի դեպքում բեռն անմիջապես միացվում է զուգահեռ կոնդենսատորին, տրանսֆորմատորի դեպքում պարզ կառուցվածք (առաջնային փաթույթը չունի միջինացված կետ), ըստ հզորության տրանսֆորմատորի լավագույն օգտագործում, իսկ թերություններից են` երկու անգամ ավել թիրիստոի և երկու անգամ մեծ ունակությամբ կոնդենսատորի անհրաժեշտությունը:
Երկտակտ թիրիստորային ինվերտորի սխեմաների տարբերակներ են բերված նկ. 8.28 –ում:
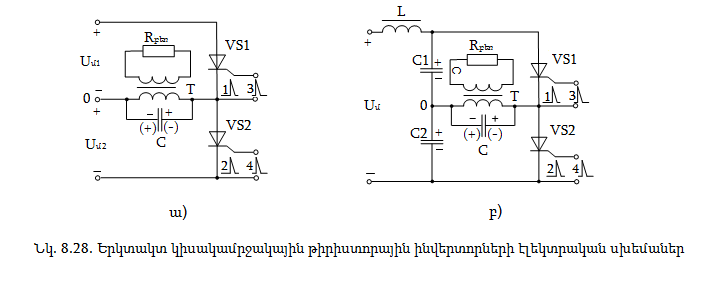
Նկար 8,28ա տարբերակում գործում են երկու մուտքային լարում, որոնք միացված են հաջորդաբար, որի 0 զրոյական կետին միացվում է տրանսֆորմատորի կամ բեռի մի ելուստը, իսկ հաջորդ ելուստը միացվում է թիրիստորների միացման ընդհանուր կետին: Նկար 8.28բ տարբերակում երկու մուտքային աղբյուրները փոխարինված են մեկ աղբյուրով, բայց կոնդենսատորներով կատարված է լարման բաժանում` 0 զրոյական կետ ձևավորելու համար: Բերված ինվերտորների աշխատանքի սկզբունքը նման է նախորդներին:
8.7. ԵԼՔԱՅԻՆ ԱՍՏԻՃԱՆԱՅԻՆ ԼԱՐՄԱՄԲ ԻՆՎԵՐՏՈՐ
Ներկայացված ինվերտորներում էլեկտրոնային բանալիների կառավարման սխեմայի բարդությունը, կոմուտացիայի ժամանակ կորուստները և ելքային լարման որակը հաճախ պարտադրում են առաջադրված խնդրի լուծման համար տարբերակ ընտրել ելքային լարման աստիճանային ձևավորման ինվերտորները: Դրանք բաղկացած են մեծ թվով ինվերտորներից, որոնց ելքային լարումը ուղղանկյունաձև է, բայց տարբերվում են ամպլիտուդներով և հաճախականություններով: Ինվերտորների ելքային ուղղանկյուն լարումները տրանսֆորմատորի միջոցով բեռի վրա գումարվում են, և արդյունքում ստացվում է աստիճանաձև լարում, որն իր տեսքով մոտ է սինուսոիդին: Ինվերտորների քանակի ավելացմամբ, ելքային լարումների ամպլիտուդի և հաճախականությունների փոփոխմամբ հնարավոր է դառնում բեռի վրայի լարման տեսքն ավելի մոտեցնել սինուսոիդին:
Ելքային լարման աստիճանային ձևավորման ինվերտորի կառուցվածքային սխեման, որի կազմի մեջ ինվերտորները երեքն են, և նրա ժամանակային բնութագրերը պատկերված են նկ 8.29 -ում:
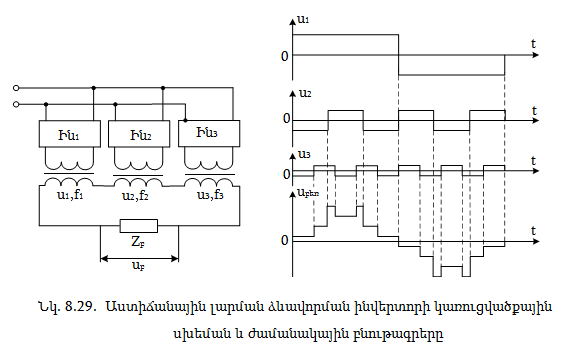
8.8. ԹԻՐԻՍՏՈՐԱՅԻՆ ՀԱՃԱԽԱԿԱՆ ԿԵՐՊԱՓՈԽԻՉ
Հաստատուն
հոսանքի
բացահայտ
օղակով
հաճախության
կերպափոխիչները
կազմվում
են
ըստ
նկ.
8.1գ
-ում
պատկերված
կառուցվածքային
սխեմայի:
f1 սկզբնական
հաճախականությամբ
փոփոխական
հոսանքի
ցանցի
լարումն,
ուղղվում
է
ուղղիչային
կերպափոխիչի
միջոցով,
որից
հետո
ուղղված
հաստատուն
լարումը
ինվերտորով
(տրանզիստորային
կամ
թիրիստորային)
կերպափոխվում
է
պահանջվող
f2 հաճախականությամբ
փոփոխական
լարման
![]() Անհրաժեշտության
դեպքում
ուղղիչի
ելքային
լարումը
զտվում
և
կայունացվում
է:
Կերպափոխիչի
ելքային
լարումը
կարգավորելու
համար
կարելի
է
օգտագործել
կարգավորվող
ուղղիչներ,
իսկ
f2 հաճախականության
կարգավորման
համար
օգտագործվում
են
ինվերտորներ,
որտեղ
կառավարող
իմպուլսներն
ունեն
փոփոխվող
հաճախականություն:
Անհրաժեշտության
դեպքում
ուղղիչի
ելքային
լարումը
զտվում
և
կայունացվում
է:
Կերպափոխիչի
ելքային
լարումը
կարգավորելու
համար
կարելի
է
օգտագործել
կարգավորվող
ուղղիչներ,
իսկ
f2 հաճախականության
կարգավորման
համար
օգտագործվում
են
ինվերտորներ,
որտեղ
կառավարող
իմպուլսներն
ունեն
փոփոխվող
հաճախականություն:
Այդպիսով, հաստատուն հոսանքի բացահայտ օղակով հաճախության կերպափոխիչը պարզ ուղղիչի և ինվերտորի ամբողջությունն է:
Հաստատուն հոսանքի թաքուն օղակով հաճախականության կերպափոխիչներում բանալիներն օգտագործվում են հոսանքի ուղղման և ինվերտացման համար: Դիտարկենք այդպիսի կերպափոխիչի մի տարբերակ (նկ. 8.30):
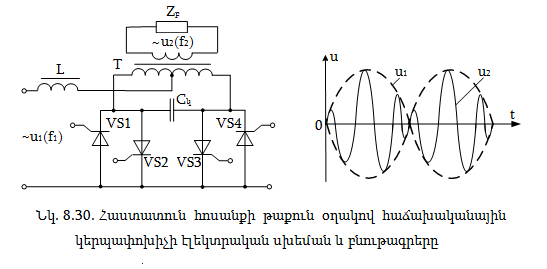
Նկար 8.30-ում պատկերված է միաֆազ հաճախական կերպափոխիչի սխեման, որը հանդիպակաց-զուգահեռ միացված թիրիստորներով զուգահեռ ինվերտոր է: Թիրիստորների այդպիսի միացումը ապահովում է դրանց աշխատանքը մուտքային u1 լարման դրական և բացասական կիսապարբերությունների ժամանակ: Այդտեղ, ինչպես ինվերտորներում, թիրիստորները բացվում են կառավարող էլեկտրոդներին տրվող լարման իմպուլսների շնորհիվ, իսկ փակումն ապահովվում է Cկ կոմուտացնող կոնդենսատորով: Լարման մի կիսապարբերության ժամանակ բացվում են VS1 և VS4 թիրիստորները, իսկ հաջորդ կիսապարբերության ժամանակ` VS2 -ը և VS3 -ը: Ելքային լարման f2 հաճախականությունը պայմանավորվում է կառավարող իմպուլսների հաճախականությամբ, որոնք ձևավորվում են կառավարման սխեմայով: Ինչպես երևում է կերպափոխիչի լարումների բնութագրերից, ելքային u2 լարումը f2 հաճախականությամբ մոդուլացվում է մուտքային u1 սինուսոիդական լարման f1 հաճախականությամբ:
Դիտարկվող կերպափոխիչում ելքային լարման հաճախականությունը մեծ է սնող լարման հաճախականությունից (f2>f1): Կան նաև ներքին ուղղման շղթայով կերպափոխիչներ, որոնց ելքային լարման հաճախականությունը փոքր է սնող լարման հաճախականությունից:
ՈՒսումնասիրված սխեմայի տարբերակով ստեղծվում է եռաֆազ-միաֆազ հաճախականության կերպափոխիչ, որը պարունակում է միաֆազ զուգահեռ երեք ինվերտոր:
8.9. ԿՈՆՎԵՐՏՈՐՆԵՐ
Կոնվերտորների միջոցով հնարավոր է հաստատուն լարումը բարձրացնել, ցածրացնել, կարգավորել, ինչպես նաև կատարել լարման բևեռականության դարձափոխում: Ինչպես նշվել է, կոնվերտորն իր մեջ պարունակում է ինվերտոր, ուղղիչ և զտիչ: Ուղղիչային սխեման կարող է լինել բացահայտ և ոչ բացահայտ:
Դիտարկենք ոչ բացահայտ ուղղիչային սխեմաներով միատակտ տրանզիստորային կոնվերտորների որոշ սխեմային տարբերակներ (նկ. 8.31):
Ներկայացված սխեմաներում տրանզիստորներն աշխատում են բանալիային ռեժիմում:
Նկարում բերված`
ա) տարբերակի սխեման կարող է աշխատել լարման ցածրացումով,
բ) լարման բարձրացումով
գ) կատարում է լարման բևեռականության դարձափոխում:
Նկար 8.31ա-ում, երբ բաց է VT տրանզիստորը, սնման աղբյուրի էներգիայի մի մասը տրվում է բեռին, իսկ որոշ քանակի էներգիա միաժամանակ կուտակվում է L-ում և C2-ում: Rբ բեռով անցնում է հոսանք: Երբ VT -ն փակ է, բեռն էներգիա է ստանում L -ից և C2 -ից, ընդ որում L -ի հոսանքը փակվում է բեռով և VD դիոդով, իսկ C2 -ինը` բեռով:
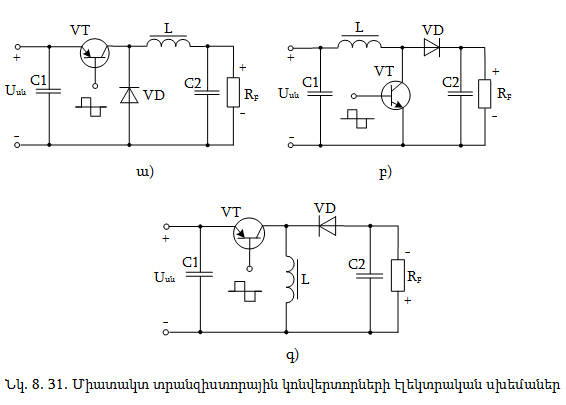
Կոնվերտորի
ելքային
հաստատուն
լարման
մեծությունը
կախված
է
տրանզիստորի
կառավարման
ազդանշանի
![]() լցման
գործակցից
հետևյալ
կերպ.
լցման
գործակցից
հետևյալ
կերպ.
![]()
Քանի
որ կառավարման
ազդանշանի
լցման գործակցի
արժեքը
կարող է
փոխվել 0…1 միջակայքում, հետևաբար, հաշվի
առնելով
տրանզիստորի, դիոդի
և ինդուկտիվության
վրա լարման
կորուստները, բեռի
վրայի լարումը
միշտ փոքր
է մուտքայինից`![]() Ներկայացված
կոնվերտորի
սխեման
անվանվում
է մուտքային
լարման
նվազմամբ:
Ներկայացված
կոնվերտորի
սխեման
անվանվում
է մուտքային
լարման
նվազմամբ:
Նկ. 8.31բ տարբերակում VT -ի բաց ռեժիմի դեպքում սնման աղբյուրի հաշվին L -ում կուտակվում է էներգիա, իսկ փակ ռեժիմի ժամանակ էներգիան սնման աղբյուրից և L -ից տրվում է բեռին և C2 -ին: Ընդ որում, C2 -ը իր էներգիայի մի մասը փոխանցում է բեռին նաև VT -ի բաց ռեժիմի դեպքում:
Այդ տարբերակում կոնվերտորի ելքային հաստատուն լարման մեծությունը տրանզիստորի կառավարման ազդանշանի լցման գործակցից կախված է հետևյալ կերպ.
![]()
Քանի որ կառավարման ազդանշանի լցման g գործակցի ցանկացած արժեքի դեպքում Uբ -ը փոքր չէ Uմ -ից, հետևաբար նկ. 8.31բ. -ում ներկայացված կոնվերտորն իրականացնում է մուտքային լարման բարձրացում:
Նկար 8.31գ տարբերակում, երբ VT -ն բաց է, սնման աղբյուրի էներգիայի մի մասը կուտակվում է L -ում, իսկ երբ փակ է, L -ում կուտակված էներգիան տրվում է բեռին և C2 -ին` հոսանքը փակվելով VD դիոդով: VT -ի բաց լինելու դեպքում բեռում հոսանքն ապահովվում է C2 -ում կուտակված էներգիայի հաշվին:
Այդ տարբերակում կոնվերտորի ելքային հաստատուն լարման մեծությունը տրանզիստորի կառավարման ազդանշանի լցման գործակցից կախված է հետևյալ կերպ.
![]()
Երբ
![]() ապա
Uբ
= Uմ,
այսինքն`
կոնվերտորը
կատարում
է հաստատուն
լարման
բևեռականության
դարձափոխում:
Եթե
ապա
Uբ
= Uմ,
այսինքն`
կոնվերտորը
կատարում
է հաստատուն
լարման
բևեռականության
դարձափոխում:
Եթե![]() ապա
Uբ
< Uմ,
իսկ եթե
ապա
Uբ
< Uմ,
իսկ եթե
![]() ապա
Uբ
> Uմ:
Այդ տարբերակային
կոնվերտորի
միջոցով
կարելի
է բարձրացնել
և ցածրացնել
Uմ
-ին լարումը
բեռի վրա,
ինչպես
նաև փոխել
լարման
բևեռականությունը
բեռի վրա:
ապա
Uբ
> Uմ:
Այդ տարբերակային
կոնվերտորի
միջոցով
կարելի
է բարձրացնել
և ցածրացնել
Uմ
-ին լարումը
բեռի վրա,
ինչպես
նաև փոխել
լարման
բևեռականությունը
բեռի վրա:
Սխեմաներում C1 -ը նախատեսված է տրանզիստորի կոմուտացիայի ժամանակ անցողիկ երևույթների մարման և հոսանքի որակի (անընդհատության) բարելավման համար:
Նշված սխեմաները միատակտ են, քանի որ կառավարման ազդանշանի մի կիսապարբերության ընթացքում բացվում է մեկ տրանզիստոր, և բեռի հոսանքի մի կեսը ստացվում է այդ ժամանակահատվածում:
Բերված միատակտ կոնվերտորների սխեմաներում որպես էլեկտրոնային բանալի կարելի է կիրառել նաև թիրիստորը, բայց պետք է հաշվի առնել, որ թիրիստորի բացումը կատարվում է դրական կարճատև ազդանշանով, իսկ փակելու համար հարկավոր է լրացուցիչ կոմուտացնող շղթա: Միատակտ կոնվերտորի տարբերակ թիրիստորի կիրառմամբ բերված է նկ. 8.32 -ում:
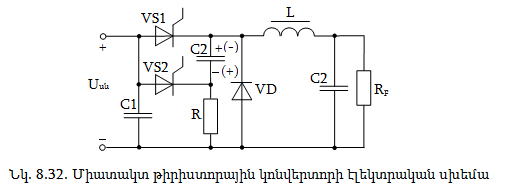
Սխեմայում գործող VS2-C2-R տարրերով ձևավորվում է լրացուցիչ կոմուտացիոն շղթա; VS1 -ի բաց ռեժիմի դեպքում բեռին էներգիա տրվում է մուտքային Uմ աղբյուրից; L -ում և C3 -ում կուտակվում է էներգիա: Միաժամանակ լիցքավորվում է նաև C2 -ը VS1 -ի և R միջոցով (բևեռականությունը ցույց է տրված առանց փակագծերի): Լրացուցիչ VS2 -ի բացվելու դեպքում C2 -ի լարումը, որպես հակառակ լարում, տրվում է VS1 -ին և այն փակվում է, իսկ C2 -ը վերալիցքավորվում է (բևեռականությունը ցույց է տրված փակագծերով), որի շնորհիվ փակվում է VS2 -ը, երբ բացվում է նորից VS1 -ը: Այդպիսով VS1 -ի բացված ռեժիմի ժամանակահատվածն ընկած է VS1 -ի և VS2 -ի կառավարման իմպուլսների միջև:
Երկտակտանի բացահայտ ուղղիչային սխեմաներով կոնվերտորների սխեմաներ կարելի ստանալ, եթե 8.6. ԻՆՎԵՐՏՈՐՆԵՐ բաժնում բերված երկտակտանի ինվերտորների ելքում, բեռից առաջ, միացվեն ուղղիչներ:
Որպես կոնվերտորի տարբերակ բերված սխեման բաղկացած է թիրիստորային կամրջակային ինվերտորից, տրանսֆորմատորից և դիոդային կամրջակային ուղղիչից (նկ. 8.33):
Բերված սխեմայում ուղղիչը կարող է լինել այլ տեսակի, իսկ անհրաժեշտության դեպքում միացվի նաև հարթեցնող զտիչ կամ լարման բազմապատկիչ:
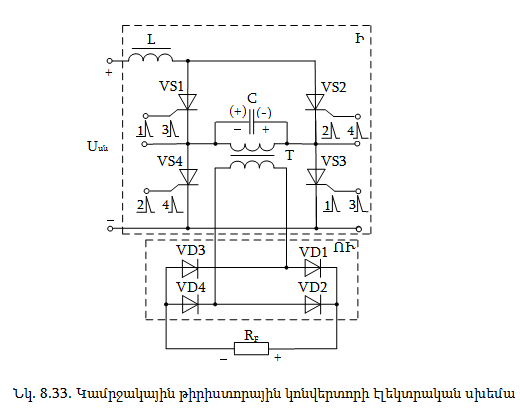
Բերված կոնվերտորի աշխատանքի սկզբունքը պատկերացնելու համար 8.7.2. Թիրիստորային ինվերտորներ բաժնում կարելի է ծանոթանալ ինվերտորի աշխատանքին, իսկ 8.2.1.ՄԻԱՖԱԶ ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՈՒՂՂԻՉԱՅԻՆ ԿԵՐՊԱՓՈԽԻՉՆԵՐ բաժնում` կամրջակային ուղղիչի աշխատանքին:
8.10. ՀԱՃԱԽՈՒԹՅԱՆ ՄԻՋԱՆԿՅԱԼ ԿԵՐՊԱՓՈԽՈՒՄՈՎ ՈՒՂՂԻՉՆԵՐ
ՈՒղղիչային սարքերի կշիռը և եզրաչափերը գլխավորապես կախված են սնող տրանսֆորմատորի և հարթեցնող զտիչների կիրառությունից: Հատկապես մեծածավալ են բարձրավոլտ ուղղիչները, տրանսֆորմատորները և հարթեցնող զտիչների կոնդենսատորները, որոնց ելքային լարումները հասնում են մինչև տասնյակ կիլովոլտերի: Տրանսֆորմատորների և զտիչների եզրաչափերը ֆոքրանում են ուղղվող լարման հաճախականության մեծացման հետ: Այդ կապից էլ առաջացել է միջանկյալ հաճախականության կերպափոխումով ուղղիչի գաղափարը:
Միջանկյալ հաճախականության կերպափոխումով ուղղիչի բլոկ սխեմայի տարբերակներ բերված են նկ 8.35 -ում, որտեղ կատարված են հետևյալ տառային նշանակումները. ՀԿ` հաճախականային կերպափոխիչ, Տր` տրանսֆորմատոր, Ին` ինվերտոր, ՈՒղղ` ուղղիչ, ՀԶ` հարթեցնող զտիչ:
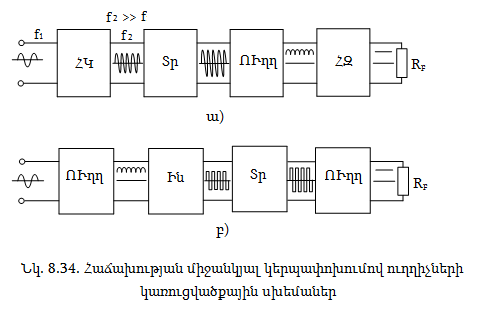
Նկար 8.34ա -ում հաճախականային կերպափոխիչով բարձրացվում է մուտքային փոփոխական լարման հաճախությունը, տրանսֆորմատորով լարման ամպլիտուդը հասցվում է համապատասխան մակարդակի, ուղղիչով կերպափոխվում է հաստատուն բաբախող լարման, որից հետո բաբախումները հարթեցվում են զտիչով: Քանի որ տրանսֆորմատորը և զտիչը աշխատում են բարձր հաճախականության տակ, դրանց եզրաչափերը և կշիռը փոքրանում են մի քանի անգամ:
Նկար 8.34բ -ում մուտքային փոփոխական լարումն ուղղիչով կերպափոխվում է հաստատուն բաբախող լարման, ինվերտորով կերպափոխվում` փոփոխական բարձր հաճախության ուղղանկյուն ազդանշաններով լարման, տրանսֆորմատորով լարման ամպլիտուդը հասցվում է համապատասխան մակարդակի, որից հետո ուղղիչով կերպափոխվում` հաստատուն լարման: ՈՒղղանկյուն ազդանշաններով լարման կերպափոխումն ապահովում է հարթեցնող զտիչի բացառմանը:
Երբեմն, որպես ելքային ուղղիչ հաճախ օգտագործվում է լարման բազմապատկիչը, որը թույլ է տալիս փոքրացնել տրանսֆորմատորի տրանսֆորմացիայի գործակիցը, որի արդյունքում փոքրանում են նրա եզրաչափերը:
9. ԼԱՐՄԱՆ ԵՎ ՀՈՍԱՆՔԻ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
9.1. ԿԱՅՈՒՆԱՐԱՐՆԵՐԻ ՆՇԱՆԱԿՈՒԹՅՈՒՆԸ ԵՎ ԴԱՍԱԿԱՐԳՈՒՄԸ
Յուրաքանչյուր էլեկտրական սարք հուսալի աշխատանք կարող է ապահովել սնման լարման որոշակի կայունության դեպքում: Որքան մեծ են սարքի աշխատանքի ճշտությունը և զգայնությունը, այնքան մեծ պետք է լինի սնման լարման կայունությունը: Օրինակ. հաստատուն հոսանքի ուժեղարարի սնման լարման անկայունությունը չպետք է գերազանցի 0.0001 % -ը:
Այն սարքերը, որոնց սնման լարման տատանման սահմանը գերազանցում է 5 % -ը, դասվում են ցածր կայունության շարքին, իսկ 1…5 % -ի դեպքում` միջինի, 0,1…1 % -ի դեպքում` բարձրի, իսկ փոքր 0,1 % -ի դեպքում` ճշգրիտի:
Սնման լարման, ինչպես դանդաղ, այնպես էլ արագ տատանումը զգալիորեն փոխում են էլեկտրական սարքի ռեժիմը և պարամետրերը: Անկայունության պատճառ կարող են հանդիսանալ սնող ցանցի լարման, հաճախության և բեռի դիմադրության փոփոխությունները, միջավայրի ջերմաստիճանի և խոնավության տատանումները և այլն: Սակայն անկայունության հիմնական ազդեցիկ պատճառները. մուտքային լարման տատանումներն են և բեռի հոսանքի փոփոխությունները:
Կախված կայունարարի շղթայի հոսանքի կամ լարման բնույթից` այդ սարքերը դասակարգվում են.
1. հաստատուն հոսանքի կամ լարման կայունարարներ,
2. փոփոխական հոանքի կամ լարման կայունարարներ:
Ըստ աշխատանքի սկզբունքի կայունարարները բաժանվում են երկու խմբի. պարամետրական և փոխհատուցմամբ:
Պարամետրական կայունարարներում կիրառվում է ոչ գծային տարր, որի վոլտամպերային բնութագիրն ունի այնպիսի տեղամաս, որտեղ լարման փոփոխությունը թույլ է կախված հոսանքից: Այդպիսի վոլտամպերային բնութագիր ունի ստաբիլիտրոնը հակադարձ լարման դեպքում աշխատելիս:
Փոխհատուցման կայունարարները բացասական հետադարձ կապով, ինքնաշխատ կարգավորմամբ փակ համակարգ են, որոնք ըստ կարգավորող տարրի միացման ձևի, բեռի նկատմամբ, լինում են` հաջորդաբար և զուգահեռ, իսկ ըստ կարգավորող տարրի աշխատանքի ռեժիմի` գծային և իմպուլսային (բանալիային):
Լարման կայունարարների հիմնական պարամետրերը հետևյալն են.
1. Մուտքային լարման անվանական արժեքը` Uմ, ելքային` բեռի վրայի Uբ լարման և Iբ հոսանքի անվանական արժեքները:
2. ՕԳԳ -ն, որը որոշվում է Pբ բեռի և Pմ մուտքի հզորության հարաբերությամբ, այսինքն`
![]()
3. Կայունացման
գործակիցն
ըստ մուտքային
լարման,
որը որոշվում
է կայունարարի
մուտքում
լարման![]() հարաբերական
աճի և
ելքում
լարման
հարաբերական
հարաբերական
աճի և
ելքում
լարման
հարաբերական
![]() աճի
հարաբերությամբ,
երբ
աճի
հարաբերությամբ,
երբ![]()
![]()
Kկ
-ի փոխարեն
երբեմն
օգտագորվում
է
կայունարարի
ստատիկ
սխալանքը,
որը, երբ![]() որոշվում
է հետևյալ
կերպ.
որոշվում
է հետևյալ
կերպ.
![]()
4. Ելքի
դիմադրությունը
(կայունությունը
ըստ բեռի),
որը որոշվում
է ելքային
լարման
և հոսանքի
փոփոխությունների
հարաբերությամբ,
երբ ![]()
![]()
5. Կայունացման
ջերմաստիճանային
գործակիցը,
որը որոշվում
է ելքային
լարման
աճի և
շրջապատի
ջերմաստիճանի
փոփոխության
հարաբերությամբ,
երբ![]()
![]()
Բացի նշված պարամետրերից, կայունարարները կարող են բնութագրվել նաև ըստ մի շարք այլ պարամետրերի, օրինակ զանգվածագաբարիտային ցուցանիշների, ինքնարժեքի և այլն:
9.2. ՀԱՍՏԱՏՈՒՆ ԼԱՐՄԱՆ ՊԱՐԱՄԵՏՐԱԿԱՆ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
Հաստատուն լարման պարամետրական կայունարարներում պարտադիր կարգով կիրառվում է ոչ գծային դիմադրություն, որի մոտ հոսանքը ոչ գծայնորեն է կախված լարումից, այսինքն` դինամիկական դիմադրությունը հավասար չէ ստատիկ դիմադրությանը: Այդպիսի կայունարարի ընդհանրացված էլեկտրական սխեման բերված է նկ. 9.1 -ում, որը կազմված է երկու էլեմենտից` Rհ գծային հավասարակշռող և ոչ գծային Rոգ դիմադրություններից:
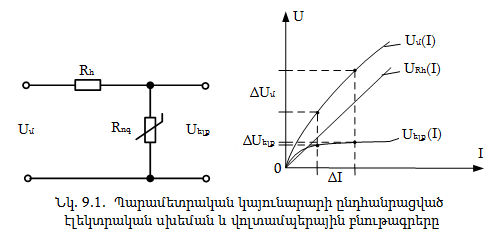
Նկարում
բերված
են սխեմայի
ընդհանուր
և առանձին
տարրերի
վոլտամպերային
բնութագրերը,
որոնցից
հետևում
են, որ
մուտքային
լարման
![]() մեծ
փոփոխության
դեպքում
ելքայինը,
որը հանվում
է ոչ
գծային
տարրի
վրայից,
կրում է
մեծ
փոփոխության
դեպքում
ելքայինը,
որը հանվում
է ոչ
գծային
տարրի
վրայից,
կրում է
![]() քիչ
փոփոխություն:
Մուտքային
լարման
փոփոխության
մեծ մասն
ընկնում
է գծային
տարրին,
այսինքն`
կատարվում
է ելքային
լարման
կայունացում:
քիչ
փոփոխություն:
Մուտքային
լարման
փոփոխության
մեծ մասն
ընկնում
է գծային
տարրին,
այսինքն`
կատարվում
է ելքային
լարման
կայունացում:
Այդպիսի ոչ գծային դիմադրությամբ է օժտված ստաբիլիտրոնը, որի կիրառությունն ամենատարածվածն է (նկ. 9.2): Սխեմայում մուտքի լարման կամ բեռի հոսանքի տատանումը հանգեցնում է ստաբիլիտրոնով հոսանքի փոփոխմանը, իսկ լարումը բեռին զուգահեռ միացված ստաբիլիտրոնի վրա համարյա մնում է անփոփոխ:
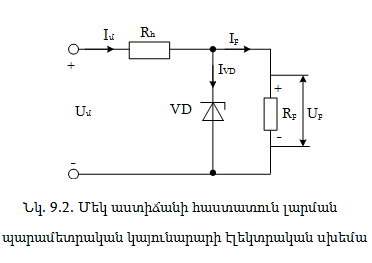
Մուտքային լարումը սխեմայում բաշխվում է հավասարակշռող Rհ դիմադրության և VD ստաբիլիտրոնի միջև, այսինքն`
![]()
որտեղ UR -ը լարման անկումն է Rհ դիմադրության վրա ստաբիլիտրոնի IVD և բեռի Iբ հոսանքներով պայմանավորված`
![]()
Հավասարակշռող Rհ դիմադրության արժեքը կորոշվի հետևյալ կերպ.
![]()
Քանի
որ UVD
լարումը
ստաբիլիտրոնի
վոլտամպերային
բնութագծի
համապատասխան
տեղամասում
համարյա
կախված
չէ ստաբիլիտրոնի
հոսանքի
IVDնվ
-ից մինչև
IVDառ
տեղամասի
սահմաններում,
ապա մուտքային
լարման
![]() աճը
մոտավորապես
հավասար
է Rh
դիմադրության
վրայի
աճը
մոտավորապես
հավասար
է Rh
դիմադրության
վրայի ![]() աճին:
աճին:
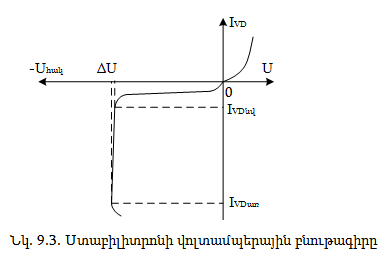
Քանի
որ հոսանքը
բեռում`![]() մնում
է անփոփոխ,
ապա կարելի
է գրել.
մնում
է անփոփոխ,
ապա կարելի
է գրել.
![]() այսինքն
մուտքային
լարման
այսինքն
մուտքային
լարման
![]() փոփոխման
դեպքում
ստաբիլիտրոնի
հոսանքը
կփոխվի
փոփոխման
դեպքում
ստաբիլիտրոնի
հոսանքը
կփոխվի
![]() մեծությամբ:
մեծությամբ:
Rհ դիմադրության արժեքն ընտրվում է այնպես, որ մուտքային լարման անվանական արժեքի դեպքում ստաբիլիտրոնով հոսանքն ունենա IVD = (IVDնվ + IVDառ) / 2 արժեքը:
Երբ անհրաժեշտ է կայունացնել մեծ ելքային լարում, ստաբիլիտրոնները կարող են միացվել հաջորդաբար (նկ. 9.4 ում կայունարար 1), իսկ զուգահեռ միացումը դառնում է անիմաստ, քանի որ չկան ճիշտ նույն պարամետրերով ստաբիլիտրոններ:
Կայունացման գործակցի մեծացման համար կիրառվում է կայունարարների հաջորդական (կասկադային) միացումը, որի դեպքում կայունացման ընդհանուր գործակիցը` Kընդ.կ հավասարվում է առանձին կայունարարների կայունացման գործակիցների արտադրյալին`
![]()
Նկար 9.4 -ում բերված է երկաստիճան հաստատուն լարման պարամետրական կայունարարի էլեկտրական սխեման, որը բնութագրվում է փոքր օգտակար գործողության գործակցով, մուտքային լարման զգալի մեծացմամբ, սակայն մեծ կայունության գործակցով:
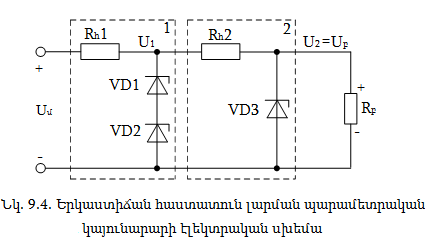
Պարամետրական կայունարարում բարձր կայունացում կարելի է ստանալ, եթե սխեմայում հավասարակշռող դիմադրության փոխարեն կիրառվի հոսանքակայունարար տրանզիստորը: Այդպիսի օրինակ p-n-p տրանզիստորի հիման վրա բերված է նկ. 9.5 -ում:
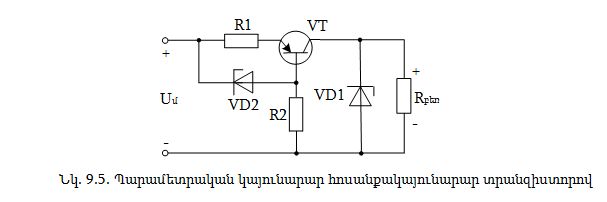
Երբ փոխվում է լարումը մուտքում, ապա փոխվում է նաև լարման անկման չափը VT տրանզիստորի վրա, որով փոխհատուցվում է լարման փոփոխությունը մուտքում և ապահովվում է ելքային լարման բարձր ճշտությամբ կայունություն:
Օրինակ, եթե մուտքում լարումը մեծանում է, ապա արդյունքում մեծանում է հոսանքը շղթայում, մեծանում է լարման անկումը R1 դիմադրության վրա, իսկ VT -ի էմիտեր-բազա անցման վրա լարումը փոքրանում է, ինչը հանգեցնում է VT -ի դիմադրության մեծացմանը և նրա էմիտեր-կոլեկտոր անցման վրայի լարման անկման մեծացմանը: Արդյունքում ելքային լարումը մնում է անփոփոխ:
Ելքային լարման կայունության վրա շրջապատի ջերմաստիճանի ազդեցությունը նվազեցնելու համար պետք է կիրառել ջերմազդազերծում, որտեղ այդպիսի տարր կարող է հանդիսանալ թերմիստորը: Այն միացվում է հիմնական կայունացնող տարրին հաջորդաբար, քանի որ ստաբիլիտրոնին բնորոշ է դրական ջերմաստիճանային գործակիցը, իսկ թերմիստորին` բացասականը:
Լայն տարածում ունեն կամրջակային սխեմաները (նկ. 9.6), որտեղ մուտքային լարումը տրվում է երկու VD1, VD2 ստաբիլիտրոնով կամրջակային պարամետրական կայունարարի մի անկյունագծին, իսկ կայունացված լարումը հանվում է մյուս անկյունագծից: Այդպիսի սխեմայի կայունացման գործակիցը զգալիորեն գերազանցում է սովորականին:
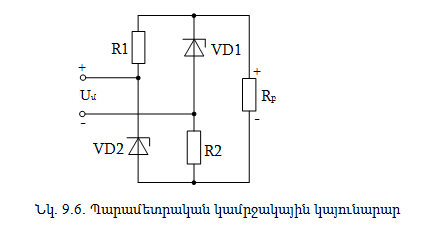
Սրանցում
օգտագործվում
են տարբեր
կայունացման
լարումներով
ստաբիլիտրոններ,
և ելքային
լարումը
որոշվում
է ստաբիլիտրոնների
կայունացման
լարումների
տարբերությամբ`![]() :
:
Լարման պարամետրական կայունարարները պարզ և հուսալի են, սակայն ունեն էական թերություններ, որոնցից գլխավորներն են. ելքային լարման կարգավորման անհնարինությունը, կայունացման գործակցի և ՕԳԳ -ի փոքր արժեքները, մեծ մուտքային դիմադրությունը, փոքր ելքային հզորությունը, և ելքային լարման կախումը շրջապատի ջերմաստիճանից:
9.3. ՀԱՍՏԱՏՈՒՆ ԼԱՐՄԱՆ ՓՈԽՀԱՏՈՒՑՈՒՄՈՎ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
Լարման բարձրորակ կայունացում կարելի է ստանալ փոխհատուցման կայունարարների կիրառման դեպքում, որոնցում գործող ինքնաշխատ կարգավորման համակարգը, ելքային իրական մեծությունը համեմատում է հենակային լարման հետ: Համեմատվող լարումների տարբերությունն ուժեղացվում է, և դրանով ներգործվում կայունարարի կարգավորման տարրի վրա այնպիսի ձևով, որ ելքի լարումը ձգտի վերադառնալ առաջադրված մակարդակ: Որպես հենակային լարման աղբյուր սովորաբար օգտագործում են բեռի փոքր հոսանքների, հազվադեպ գալվանական մարտկոցի վրա աշխատող պարամետրական կայունարարը:
Փոխհատուցումով կայունարարներում կարգավորող տարրը աշխատում է անընդհատ կամ իմպուլսային ռեժիմներում: Դրանով պայմանավորվում է կայունարարի դասակարգումը անընդհատի և իմպուլսայինի:
Անընդհատ կայունարարում կարգավորող տարրը միշտ բաց է և դրանով անցնում է հոսանք, որը կարգավորող տարրում առաջացնում է կորուստ, իսկ իմպուլսայինում` աշխատում է բանալու ռեժիմում և հոսանք անցնում է միայն բաց վիճակում, որի հետևանքով էներգիայի կորուստը փոքր է:
Կարգավորող տարրի միացման եղանակից կախված տարբերում են հաջորդական (նկ. 9.7ա) և զուգահեռ (նկ. 9.7բ) տեսակների փոխհատուցումով կայունարարներ:
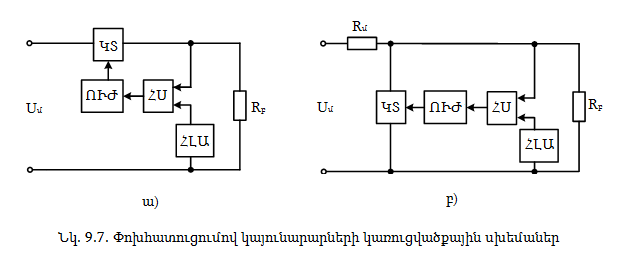
Նկ. 9.7 -ում կայունարարների հիմնական տարրերն են` հենակային լարման աղբյուրը (ՀԼԱ), համեմատող սարքը (ՀՍ), ուժեղացնող տարրը (ՈՒժ), կարգավորող տարրը (ԿՏ): Հենակային լարման աղբյուրը պարամետրական կայունարար է, որն արտաքին գործոնների փոփոխություններից և ժամանակից անկախ ապահովում է անհրաժեշտ հաստատուն լարում: Կայունարարի ելքային լարումը և հենանիշային լարումները համեմատում է համեմատող սարքը և այդ համեմատման տարբերությունը ուժեղացվելով ուժեղացնող տարրի միջոցով ներգործվում է կարգավորող տարրի վրա այնպես, որ այն փոխելով իր պարամետրը հասցնի լարման տարբերությունը նվազագույնի: Ելքային լարման կայունացումը կատարվում է կարգավորող տարրի ներքին դիմադրության փոփոխման շնորհիվ:
9.3.1. ԿԱՐԳԱՎՈՐՈՂ ՏԱՐՐԻ ՀԱՋՈՐԴԱԲԱՐ ՄԻԱՑՄԱՄԲ ՓՈԽՀԱՏՈՒՑՈՒՄՈՎ ԿԱՅՈՒՆԱՐԱՐ
Հաջորդական տեսակի փոխհատուցման կայունարարի կառուցվածքային սխեմայում կարգավորող տարրը բեռին միացված է հաջորդաբար և կատարում է հավասարակշռող դիմադրության դեր (նկ. 9.7ա):
Առաջացող Uբ –Uէտ ազդանշանների տարբերությունը, որը ձևավորվում է համեմատող սխեմայում, տրվում է հաստատուն հոսանքի ուժեղարարին, ուժեղացվում և դրանով ազդում կարգավորող տարրի վրա:
Եթե![]() ապա
այդ դեպքում
կարգավորող
տարրի
ներքին
դիմադրությունն
աճում է,
և նրա
վրա լարման
անկումը
մեծանում
է: Քանի
որ կարգավորող
տարրը
և բեռը
միացված
են հաջորդաբար,
ապա ելքի
լարումը
փոքրանում
է, իսկ
եթե
ապա
այդ դեպքում
կարգավորող
տարրի
ներքին
դիմադրությունն
աճում է,
և նրա
վրա լարման
անկումը
մեծանում
է: Քանի
որ կարգավորող
տարրը
և բեռը
միացված
են հաջորդաբար,
ապա ելքի
լարումը
փոքրանում
է, իսկ
եթե ![]() ապա
տեղի են
ունենում
հակառակ
երևույթները:
ապա
տեղի են
ունենում
հակառակ
երևույթները:
Տրանզիստորների հիման վրա հաջորդական տեսակի փոխհատուցման կայունարարի սկզբունքային էլեկտրական սխեման բերված է նկ. 9.8 -ում:
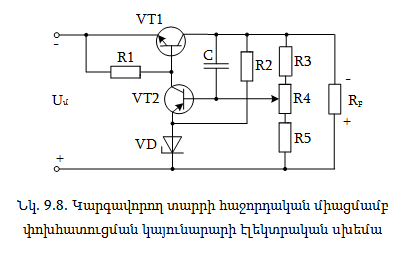
Այդ սխեմայում կարգավորող տարրի դերը կատարում է VT1 տրանզիստորը, որի թույլատրելի կոլեկտորային հոսանքը գերազանցում է կայունարարի բեռի հոսանքին, իսկ ուժեղարարի դերը կատարում է VT2 տրանզիստորը, որի ուժեղացման գործակիցը ըստ հոսանքի պետք է լինի մեծ: Եթե բեռի հոսանքը գերազանցում է VT1 տրանզիստորի թույլատրելի հոսանքին, ապա թույլատրվում է կարգավորող տրանզիստորը շունտել դիմադրությամբ կամ զուգահեռ միացնել այլ տրանզիստոր, իսկ մեծ լարումների դեպքում` կարգավորող տրանզիստորին հաջորդաբար միացնել ևս մի շարք տրանզիստորներ: Այդ տարբերակների իրականացման սկզբունքները ներկայացված են 1.3.2. Տրանզիստորների զուգահեռ և հաջորդաբար միացումները բաժնում:
Երբ մուտքային լարումն աճում է, աճում է նաև ելքայինը, որը բերում է VT2 -ի բազա-էմիտեր լարման աճին, հետևաբար աճում է նաև կոլեկտորային հոսանքը: Մեծանում է լարման անկումը R1 դիմադրության վրա, ինչն էլ հանգեցնում է VT1 -ի էմիտեր-բազա լարման նվազմանը: Վերջինի հետևանքով աճում է VT1 -ի ներքին դիմադրությունը և նրա վրայի լարման անկումը: Ելքային լարումը այդ դեպքում նվազում է` ձգտելով նախկին արժեքին: Կոնդենսատորը նպաստում է մուտքային լարման բաբախման հարթեցմանը:
Սխեման աշխատում է նույն սկզբունքով նաև բեռի դիմադրության մեծացման դեպքում:
Ելքային լարման սահուն կարգավորումը իրագործվում է R4 պոտենցիոմետրի օգնությամբ, որը միացված է կայունարարի ելքի շղթային:
Ելքային լարման փոփոխման Uբնվ նվազագույն և Uբառ առավելագույն արժեքները որոշվում են հետևյալ կերպ.
![]()
Լայն տարածում ունեն օպերացիոն ուժեղարարի հիման վրա լարման կայունարարների սխեմաները: Այդպիսի փոխհատուցման լարման կայունարարի սխեմայի տարբերակ, կարգավորող տարրի հաջորդական միացմամբ, բերված է նկ. 9.9 -ում:
Հաստատուն լարման հզոր կայունարարների օգտակար գործողության գործակցի մեծացման համար, որպես կարգավորող տարր, խորհուրդ է տրվում օգտագործել կազմածու տրանզիստոր:
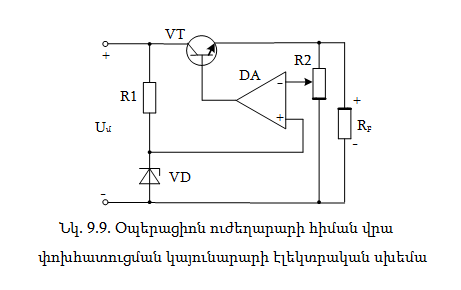
9.3.2. Կարգավորող տարրի զուգահեռ միացմամբ
փոխհատուցումով կայունարար
Զուգահեռ տեսակի փոխհատուցման կայունարարի սխեմայում (նկ. 9.7բ) կարգավորող տարրը միացված է Rբ բեռին զուգահեռ: Դրանց հաջորդաբար միացված է հավասարակշռող Rհ դիմադրությունը: Այդպիսով, զուգահեռ տեսակի փոխհատուցման կայունարարն իր կառուցվածքով հիշեցնում է պարամետրական կայունարար, որտեղ կարգավորող տարրի դերը կատարում է ստաբիլիտրոնը:
Սրանք աշխատում են հետևյալ ձևով. համեմատման սխեմայում առաջացող Uբ – Uէտ ազդանշանների տարբերությունն ուժեղացվում է ուժեղարարի միջոցով և դրանով ներգործվում է կարգավորող տարրի վրա, փոխելով նրա Iէտ հոսանքը այնպես, որպեսզի մշտապես ապահովվի ելքային նույն Uբ լարումը:
Նկար 9.10 -ում բերված է զուգահեռ տեսակի փոխհատուցման կայունարարի էլեկտրական սխեման: Բեռի վրայի լարման մեծացման դեպքում աճում է VT2 տրանզիստորի բազայի պոտենցիալը, ինչի հետևանքով աճում է նաև կոլեկտորային հոսանքը: Դրանց հետևում է կարգավորող VT1 տրանզիստորի բազային և կոլեկտորային հոսանքների աճը: Վերջինս հանգեցնում է Rհ դիմադրության վրայի լարման անկման մեծացմանը, ինչի հետևանքով ելքային լարումը որոշակի ճշտությամբ մնում է անփոփոխ:
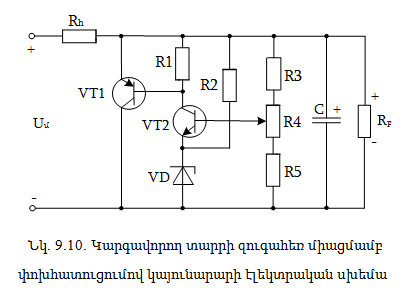
Հաջորդական տեսակի փոխհատուցման կայունարարների ՕԳԳ -ն, կայունացման գործակիցը, անջատվող ջերմությունը, չափսերը ունեն համեմատաբար լավ ցուցանիշներ` զուգահեռ տեսակի փոխհատուցման կայունարարների նկատմամբ, իսկ վերջինների առավելությունը դրանց անզգայնությունն է բեռի շղթայում կարճ միացման և գերբեռնվածությունների նկատմամբ:
9.4. ՀՈՍԱՆՔԻ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
Հոսանքի կայունարարի հիմնական պարամետրը ելքի հոսանքի կայունացման գործակիցն է, որը հավասար է մուտքի հոսանքի հարաբերական աճի և բեռի հոսանքի հարաբերական աճի հարաբերությանը, այսինքն`
![]()
Ամենապարզ հոսանքի կայունարար կարող է հանդիսանալ տրանզիստորը, որի էմիտերային շղթայում միացված է դիմադրություն (նկ. 9.11ա): Բեռով հոսանքի մեծությունը որոշվում է հետևյալ կերպ.
![]()
որտեղ Uմ -ը մուտքային լարումն է, UբԷ -ը` տրանզիստորի բազա-էմիտեր անցման վրայի լարման անկման չափը:
Փոխելով Uմ լարման արժեքը` կարելի է սահմանել անհրաժեշտ մեծության բեռի հոսանք:
Առավել մեծ կայունացման գործակից ունեն օպերացիոն ուժեղարարի կիրառմամբ սխեմաները (նկ. 9.11բ): Այդ սխեմայում կարգավորող տարր է VT տրանզիստորը, որը կառավարվում է DA օպերացիոն ուժեղարարի միջոցով:
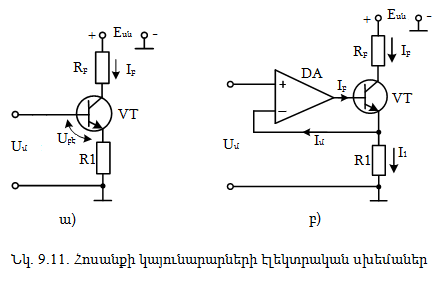
Բեռով անցնող հոսանքի մեծությունը որոշվում է հետևյալ արտահայտությամբ.
![]()
Սխեմայի նորմալ աշխատանքի համար պետք է կատարվի հետևյալ պայմանը. բեռի վրայի լարումը չպետք է գերազանցի լարման որոշակի արժեքին`
![]()
որտեղ Eսն -ն սնման լարման արժեքն է, UԿԷ -ը տրանզիստորի հագեցած ռեժիմում կոլեկտոր-էմիտեր լարումն է, I1 -ը R1 դիմադրությամբ անցնող հոսանքն է`
![]()
![]() տարբերության
չափը
փոքրացնելու
համար
հարկավոր
է,
որ
DA
օպերացիոն
ուժեղացուցիչի
մուտքային
Iմ
հոսանքը
լինի
հնարավորինս
փոքր,
իսկ
VT
տրանզիստորի
ըստ
հոսանքի
ուժեղացման
գործակիցը`
մեծ:
ՈՒստի
կայունացման
բարձր
որակ
ստանալու
համար
խորհուրդ
է
տրվում
որպես
կարգավորող
տարր
օգտագործել
կազմածու
տրանզիստոր:
տարբերության
չափը
փոքրացնելու
համար
հարկավոր
է,
որ
DA
օպերացիոն
ուժեղացուցիչի
մուտքային
Iմ
հոսանքը
լինի
հնարավորինս
փոքր,
իսկ
VT
տրանզիստորի
ըստ
հոսանքի
ուժեղացման
գործակիցը`
մեծ:
ՈՒստի
կայունացման
բարձր
որակ
ստանալու
համար
խորհուրդ
է
տրվում
որպես
կարգավորող
տարր
օգտագործել
կազմածու
տրանզիստոր:
Փոխհատուցման հոսանքի կայունարարներում բեռին հաջորդաբար միացվում է էտալոնային RԷՏ դիմադրություն, որի վրա լարումը կայունացվում է սովորական լարման կայունարարի օգնությամբ: Այդպիսով, Rբ բեռի դիմադրության փոփոխման դեպքում նրանով անցնող հոսանքը մնում է անփոփոխ: Այդպիսի սխեմաների տարբերակներից մեկը բերված է նկ. 9.12 -ում, որտեղ URԷՏ–UVD լարման տարբերությունն ուժեղացվում է VT2 տրանզիստորով ձևավորված հաստատուն հոսանքի ուժեղարարի միջոցով և դրանով ներգործում կարգավորող տարրի` VT1 տրանզիստորի վրա:
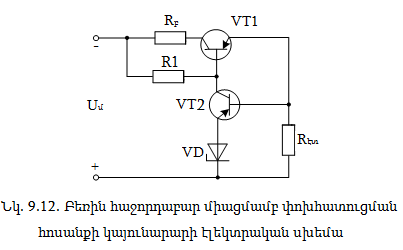
9.5. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ՊԱՐԱՄԵՏՐԱԿԱՆ ԿԱՅՈՒՆԱՐԱՐՆԵՐ
Փոփոխական լարման կայունացում կարելի է ապահովել երկու ստաբիլիտրոնի միջոցով` միացնելով ըստ նկ. 9.13ա -ի: Այդ դեպքում փոփոխական լարման մի կիսապարբերությունը կայունացվում է VD1 ստաբիլիտրոնով, իսկ մյուս կիսապարբերությունը` VD2 ստաբիլիտրոնով:
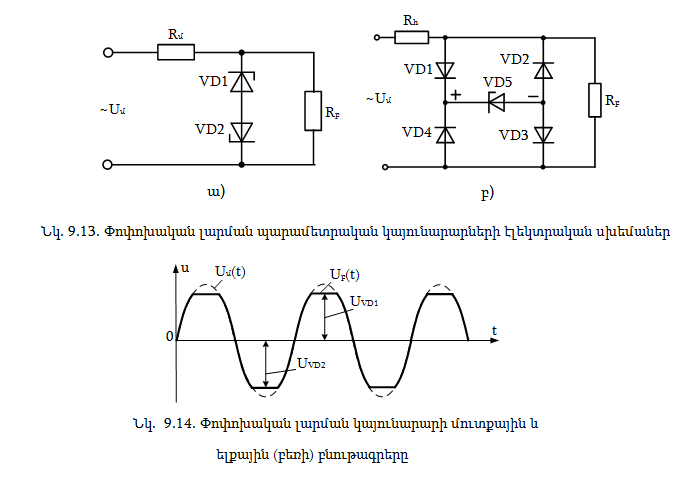
Այդպիսի կայունարարն աղավաղում է ելքային լարման տեսքը` մուտքային սինուսոիդալ Uմ(t) լարման դեպքում ելքայինը` բեռի վրայի Uբ(t) լարումը մոտենում է ուղղանկյանը, և բացի այդ, ելքային լարման երկու կիսապարբերության ամպլիտուդները ունենում են տարբեր արժեքներ` UVD1 և UVD2 ի հաշիվ ստաբիլիտրոնների պարամետրերի տարբերության (նկ. 9.14):
Վերջին թերությունը վերացվում է նկ. 9.13բ -ում բերված սխեմայում, որտեղ կիրառված է մեկ VD3 ստաբիլիտրոն, որը միացված է VD1...VD4 դիոդային կամրջակի անկյունագծին: Մուտքային փոփոխական լարման մի կիսապարբերության դեպքում ստաբիլիտրոնը միացվում է շղթային VD1 և VD3 դիոդների միջոցով, իսկ մյուս կիսապարբերության դեպքում` VD4 և VD2 դիոդների միջոցով: Արդյունքում փոփոխական լարման երկու կիսապարբերությունները կայունացվում են նույն ստաբիլիտրոնի միջոցով:
10. ՀԻԲՐԻԴԱՅԻՆ ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐ
10.1. ՀԻԲՐԻԴԱՅԻՆ ԷԼԵԿՏՐԱԿԱՆ ԱՊԱՐԱՏՆԵՐԻ ԿԱՌՈՒՑՄԱՆ ՍԿԶԲՈՒՆՔՆԵՐԸ
Հիբրիդային էլեկտրական սարքերում համակցվում են էլեկտրամեխանիկական և էլեկտրոնային կոմուտացնող տարրերը, որոնց միջոցով ավելի արդյունավետ է դառնում կառավարման սարքի տեխնիկական լուծումը, քանի որ կիրառվում են երկու համակարգերի առավելությունները: Այդ սկզբունքով կառուցվում են հաստատուն և փոփոխական հոսանքի հպարկիչները, արագագործ փոխանջատիչները և անջատիչները:
Հիբրիդային էլեկտրական սարքերը հիմնականում բաղկացած են հետևյալ հանգույցներից. հիմնական հպակներից, էլեկտրամագնիսական մեխանիզմից, ուժային կիսահաղորդչային տարրերից, ստիպողական կոմուտացնող (հիմնականում հաստատուն լարման թիրիստորային սարքերում), կառավարման և գերլարումներից պաշտպանող սխեմաներից:
Հիբրիդային հպարկիչների հանդեպ ներկայացվում են հետևյալ պահանջները.
- լրացուցիչ արտաքին սնման աղբյուրների բացակայություն,
- նախատեսված հոսանքի տիրույթում բեռի շղթայի անաղեղ միացում, անջատում և դարձափոխում,
- նվազագույն քանակի էլեկտրոնային տարրի կիրառում,
- թիրիստորների միացում այն դեպքում, երբ գլխավոր հպակով պետք է հոսանք անցնի,
- կայունություն միջանցիկ կարճ միացման հոսանքներից,
- գալվանական կապի խզվածություն մուտքային և ելքային սեղմակների միջև,
- հատուկ բանեցման մեխանիզմի անհրաժեշտություն հպակների կառավարման համար,
արտադրվող հպարկիչների հնարավոր կիրառում անաղեղ կոմուտացնող սարքեր նախագծելիս:
Ընդհանուր պահանջներին պետք է ավելացնել հետևյալները. նվազագույն չափսեր, կշիռ, ինքնարժեք, հզորության կորուստ, բարձր հուսալիություն, տեխնոլոգիականություն, պահանջվող աշխատանքային ռեսուրս, մաշակայունություն:
Ըստ սնման աղբյուրի տեսակի կառավարման սխեմաները կարելի է բաժանել հետևյալ խմբերի. կոմուտացում ցանցի լարումից, ցանցի հոսանքից, հպակային աղեղի լարումից:
10.2. ՈՒԺԱՅԻՆ ՇՂԹԱՆԵՐԻ ՀԻԲՐԻԴԱՅԻՆ ԿՈՄՈՒՏԱՑՄԱՆ ՍԽԵՄԱՆԵՐ
Համաձայն աշխատանքի սկզբունքի` հիբրիդ հպարկիչների ուժային սխեմաները բաժանվում են երկու մասի. կոմուտացում կարճատև ժամանակահատվածում աղեղի առաջացմամբ, կոմուտացում աղեղի բացակայությամբ:
Նկար 10.1 -ում բերված են հիբրիդ հպարկիչների ուժային կոմուտացման հիմնական սխեմաներից մի քանիսը, որտեղ համակցված են կիսահաղորդչային տարրերը, մեխանիկական KP ուժային (գլխավոր) և K օժանդակ հպակները:
Նկարում ներկայացված ուժային հիբրիդային հպակների տարբերակները մի քանիսն են, և դրանց հիման վրա կարելի է մշակել այլ տարբերակներ ևս: Դիտարկենք ներկայացված տարբերակները.
ա) ուժային KP հպակին զուգահեռ միացված է VD դիոդը, որով փակվում է փոփոխական հոսանքի մի կիսապարբերությունը
բ) VD դիոդը շղթայի մեջ է մտնում K օժանդակ հպակի փակման միջոցով
գ) հակադարձ միացված VD1 և VD2 դիոդները շունտում են ուժային KP հպակին համապատասխանաբար K1 և K2 օժանդակ հպակների փակման միջոցով
դ) բացակայում են K օժանդակ հպակները և ուժային KP հպակը անմիջապես շունտված է չկառավարվող VD դիոդով և կառավարվող VS թիրիստորով
ե) ուժային KP հպակը շունտված է VS սիմիստորով
զ) կամրջակային ուղղիչի մի անկյունագծում միացված է VS սիմիստորը, իսկ մյուսում` ուժային KP հպակը:

ՈՒժային կոմուտացնող սխեմաները բնութագրվում են հիմնականում հետևյալ չափանիշներով. աղեղի վառման տևողությամբ, կոմուտացման ռեսուրսով` քանակով, կիրառված կիսահաղորդչային տարրերի քանակով պայմանավորված կշռով և ծավալով, մուտքային և ելքային շղթաների միջև գալվանական խզվածության առկայությամբ, օժանդակ հպակների կառավարման հատուկ մեխանիզմի կիրառմամբ:
ՈՒժային կոմուտացնող սխեմայի ընտրությունը կամ նորի մշակումը պետք է հիմնված լինեն վերը նշված չափանիշների վրա:
10.3. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ
ՀՊԱՐԿԻՉ ՕԺԱՆԴԱԿ ՀՊԱԿԻ ԵՎ ԹԻՐԻՍՏՈՐՆԵՐԻ ԿԻՐԱՌՄԱՄԲ
Նկար 10.2 -ում բերված է միաֆազ հիբրիդային հպարկիչի էլեկտրական սխեման, որտեղ համակցված են փոփոխական հոսանքի թիրիստորային կոմուտատորը և KP ուժային մեխանիկական հպակը: Փոփոխական հոսանքի թիրիստորային կոմուտատորի աշխատանքի սկզբունքը ներկայացված է 6.2. ՓՈՓՈԽԱԿԱՆ ԼԱՐՄԱՆ ԹԻՐԻՍՏՈՐԱՅԻՆ ԿՈՄՈՒՏԱՏՈՐ բաժնում: Թիրիստորները կառավարվում են կոմուտացվող շղթայի լարումից օժանդակ K հպակի միջոցով:
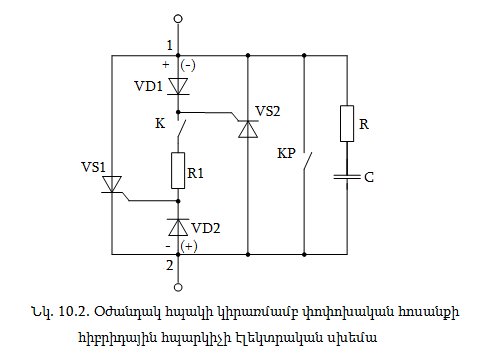
Եթե բեռի շղթան կոմուտացվի միայն KP գլխավոր մեխանիկական հպակի միջոցով, ապա այն կկոմուտացնի բեռի ողջ հզորությունը և միջհպակային միջավայրում էլեկտրական աղեղի բացասական ազդեցության և ջերմաստիճանային ծանր ռեժիմի պատճառներով սարքի հուսալիությունը շատ կփոքրանա:
Թիրիստորային կոմուտատորի կիրառմամբ բացառվում է գլխավոր հպակում աղեղի առաջացումը, քանի որ բեռի հզորության` այսինքն` բեռի հոսանքի մի մասը բաժին է ընկնում թիրիստորներին:
K օժանդակ հպակի առաջին փակման դեպքում բացվում է այն թիրիստորը, որի վրա լարումը ուղիղ է և շունտում է ուժային KP հպակի շղթան:
R1 դիմադրության արժեքը, որի միջոցով սահմանվում է թիրիստորների կառավարման հոսանքի մեծությունը, պետք է լինի հնարավորին փոքր, որպեսզի թիրիստորների բացման ժամանակը լինի նվազագույնը, իսկ կոմուտացնող շղթային զուգահեռ միացված RC շղթան նախատեսված է պաշտպանելու թիրիստորներին գերլարումներից:
Հպարկիչի հուսալիության մեծացման համար, որպես օժանդակ հպակ, կարող է կիրառվել հերկոնը, որն առանձնանում է բարձր հուսալիությամբ և աշխատանքային ռեսուրսով, արագագործությամբ, հպակների հերմետիկությամբ, կառավարման բազմազանությամբ:
Հերկոնի կառավարումը հնարավոր է իրականացնել.
հաստատուն մագնիսով` տեղափոխելով այն հերկոնի նկատմամբ,
կամ հերկոնը տեղափոխելով մագնիսի նկատմամբ,
ֆեռոմագնիսական էկրանով կամ շունտով,
հաստատուն հոսանքի փաթույթով, որի սնումը կարելի է իրականացնել անմիջապես ուժային շղթայից հոսանքի TA տրանսֆորմատորի միջոցով: Այդպիսի սնման սխեմայի տարբերակ բերված է նկ. 10.3 -ում: Հոսանքի TA տրանսֆորմատորի երկրորդային փաթույթի փոփոխական լարումը ուղղվելով VD1...VD4 կամրջակային ուղղիչի միջոցով և կայունացվելով Rբ-VT-VD5 տարրերի կողմից` տրվում է հերկոնի Kհ կառավարման փաթույթին:
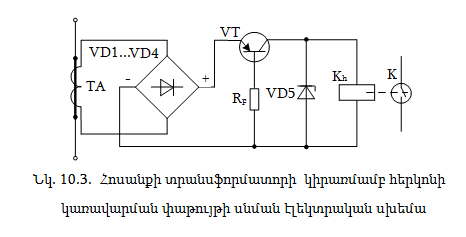
10.4. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ ՀՊԱՐԿԻՉ ՀՈՍԱՆՔԻ
ՏՐԱՆՍՖՈՐՄԱՏՈՐԻ ԿԻՐԱՌՄԱՄԲ
Նկար 10.4 -ում բերված է հոսանքի տրանսֆորմատորի կիրառմամբ հիբրիդային հպարկիչի սխեման: Այդ սխեմայում VS1 և VS2 թիրիստորների կառավարման շղթաները սնվում են համապատասխանաբար TA1 և TA2 հոսանքի տրանսֆորմատորների երկրորդային փաթույթներից: Այդ հիբրիդ հպարկիչի աշխատանքի սկզբունքը պատկերացնելու համար պետք է ուսումնասիրել նախորդ հպարկիչների աշխատանքը: Թիրիստորների կառավարման շղթաներին զուգահեռ միացված VD3 և VD4 ստաբիլիտրոնները նախատեսված են թիրիստորների կառավարման շղթաների պաշտպանության համար:
Հպարկիչի KP ուժային մեխանիկական հպակի փակման դեպքում հոսանքը, անցնելով հպակով և տրանսֆորմատորների առաջնային փաթույթներով, բացվում է այն թիրիստորը, որի վրա տվյալ պահին կիրառված է ուղիղ լարում: Այսպես, երբ 1 կետի պոտենցիալը դրական է, իսկ 2 -ինը` բացասական, ապա բացվում է VS1 թիրիստորը, և այդ կիսապարբերության ողջ ընթացքում մնում է բաց վիճակում: Փոփոխական լարման հաջորդ կիսապարբերության ընթացքում (բևեռականությունը ցույց է տրված փակագծերում) բացվում է VS2 թիրիստորը: Բեռի հոսանքի մի մասն անցնում է տվյալ պահին բացված թիրիստորով:
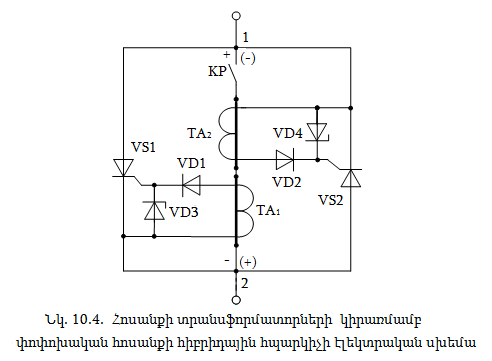
ՈՒժային հպակի բացումից անմիջապես հետո հոսանքը տեղափոխվում է այն զուգահեռ ճյուղը, որի թիրիստորը գտնվում է բաց վիճակում: Դրա շնորհիվ գլխավոր հպակների միջև էլեկտրական աղեղ չի առաջանում, իսկ էլեկտրական շղթայի անջատումը տեղի է ունենում փոփոխական լարման պարբերության վերջում, երբ փակվում է բաց թիրիստորը:
Էլեկտրական շղթայի կոմուտացիայի բնութագրերի գրաֆիկական պատկերը տրված է նկ. 6.2 -ում:
10.5. ՓՈՓՈԽԱԿԱՆ ՀՈՍԱՆՔԻ ՀԻԲՐԻԴԱՅԻՆ ՀՊԱՐԿԻՉ
ԿԱՄՐՋԱԿԱՅԻՆ ՀՊԱԿԻ ԿԻՐԱՌՄԱՄԲ
Նկար 10.5 -ում բերված փոփոխական հոսանքի հիբրիդային հպարկիչի սխեմայի առանձնահատկությունն այն է, որ կոմուտացման ուժային հպակ է հանդիսանում KP կամրջակային հպակը:
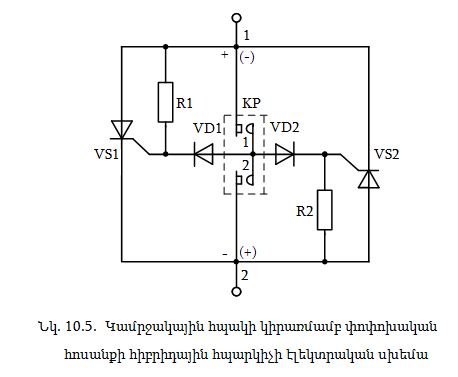
Բերված սխեմայում թիրիստորների բացումը, կախված կամրջակային KP հպակի դիրքից, իրականացվում է ցանցի լարումից կամ աղեղի լարումից: Օրինակ, եթե սխեմայում լարման բևեռականությունը համապատասխանում է առանց փակագծերի պայմանին, և այդ պահին փակվում է կամրջակային KP հպակի առաջին 1 հպակը, ապա VS1 թիրիստորի բացումը կատարվում է սնման լարումից, իսկ եթե առաջինը փակվում է 2 հպակը և հետո 1 -ը, իսկ 2 հպակը թրթռման հետևանքով բացվում է, ապա VS1 թիրիստորի բացումը կատարվում է աղեղի լարմամբ:
Հիբրիդային հպարկիչի այդպիսի կառուցվածքի առավելություններն են` բարձր հուսալիությունը, փոքր եզրաչափերը և նվազագույն էներգիայի կորուստը, իսկ թերություններից են` կամրջակային ճկուն հպակի տեխնոլոգիայի բարդությունը և հպակների ցածր մաշակայունությունը, քանի որ աղեղային երևույթները նպաստում են մեխանիկական հպակի մաշվածության մեծացմանը:
ԳՐԱԿԱՆՈՒԹՅՈՒՆ
1. Բարեղամյան Գ.Վ., Մարգարյան Վ.Վ. ՈՒժային էլեկտրոնիկայի հիմունքներ: Ուսումնական ձեռնարկ / ՀՊՃՀ.- Եր.: Ճարտարագետ, 2011.- 140 էջ:
2. Գրիգորյան Ա.Խ. Կառավարման էլեկտրական ապարատներ: Ուսումնական ձեռնարկ / Եր.: Ճարտարագետ, 2011.- 176 էջ:
4. Կորոլյով Գ.Վ. Ավտոմատիկայի էլեկտրոնային սարքեր: Ուսումնական ձեռնարկ / Եր.: Լույս, 1987.- 303 էջ:
5. Մանուկյան Ս.Հ. Էլեկտրոնիկա և սխեմատեխնիկա: Դասագիրք.- Եր.: Ճարտարագետ, 2008.- 488 էջ:
6. Ստեփանյան Ս.Պ., Ստեփանյան Մ.Պ. Ավտոմատացված թիրիստորային էլեկտրաբանեցում: ՈՒսումնական ձեռնարկ/ Եր.: Ճարտարագետ, 2003.- 272 էջ:
7. Забродин Ю.С. Промышленная электроника.- М.: Высшая школа, 1982.- 496 с.
8. Криштафович А.К. Промышленная электроника.- М.: Высшая школа, 1984.- 351 с.
9. Мелешин В.И. Транзисторная преобразовательная техника.- М.: Техносфера, 2006.- 632 с.
10. Рябин Г.Я, Ивакин Б.Ф. и др. Коммутационные устройства радиоэлектронной аппаратыры.- М.: Радио и связь, 1985.- 264 с.
11. Могилевский Г.В. Гибридные электрические аппараты низкого напряжения.- М.: Энергоатомиздат, 1986.- 232 с.
12. Шопен Л. Бесконтактные электрические аппараты автоматики.-М.: Энергоиздат, 1986.- 568 с.
13. Электрические и электронные аппараты: Учебник для вузов./ Под ред. Ю.К. Розанова.- М.: Информэлектро, 2001.- 420 с.
ԱՆԴՐԱՆԻԿ ԹԱՐԻԿԻ ՀՈՎՀԱՆՆԻՍՅԱՆ
ԷԼԵԿՏՐԱԿԱՆ ԵՎ ԷԼԵԿՏՐՈՆԱՅԻՆ ԱՊԱՐԱՏՆԵՐ
ՄԱՍ 2
ՈՒՍՈՒՄՆԱԿԱՆ ՁԵՌՆԱՐԿ
ОГАНЕСЯН АНДРАНИК ТАРИКОВИЧ
ЭЛЕКТРИЧЕСКИЕ И ЭЛЕКТРОННЫЕ АППАРАТЫ
ЧАСТЬ 2
УЧЕБНОЕ ПОСОБИЕ
HOVHANNISYAN ANDRANIK TARIKI
ELECTRICAL AND ELECTRONIC APPARATUS
PART 2
TUTORIAL
Խմբագիր` Նելլի Խաչատրյան
Ստորագրված է տպագրության` 11.07.2017թ.
Թուղթը` «օֆսեթ»: Տպագրությունը` ռիզո, ֆորմատ`6084 1/16:
Շարրվածքը` համակարգչային:
Տառատեսակը` Sylfaen: 10.75 տպ.մամ.:
Պատվեր`315: Տպաքանակ`100